Modern RAM is dynamic RAM or DRAM. This is made of one
transistor + capacitor per bit. DRAM is cheap and dense, but loses the value
after a few milliseconds unless refreshed (read and re-written) before then.
Fast DRAM can have errors. Adding parity bits (ECC or error correcting code)
is used in servers used in data centers, when the cost is worth not having
errors.
Studies done in 2015 have shown DRAM errors are often
caused by one bad cell in a row or column of a memory block. Facebook and
others have added page retirement, which is the same as mapping out bad
blocks on a disk, but for RAM.
Static RAM or SRAM uses 6 transistors per bit and is nearly
twice as expensive as DRAM, but doesn’t need to be refreshed and so uses less
power and is around 6 times faster.
RAM is sold in modules called DIMMs
(dual inline memory modules) that plug into mating sockets on the
motherboard. This allows RAM to be upgraded or replaced as needed. The speed
of RAM is measured in terms of the original speed: DDR (double data rate), DDR2
(double DDR) and DDR3 (double DDR2). In 2012, the DDR4 standard was finalized;
it operates at a maximum of 1.2 volts (20 percent less voltage than DDR3), and
achieves data transfer rates of 3.2 billion transfers per second (double DDR3).
As of 2018, DDR5 is available and DDR6 has been announced.
RAM sold for use on servers often includes extra parity
bits per byte, so the RAM can detect any errors and, in some cases, correct
them. This “EC” RAM is a lot more expensive than commodity DRAM used in PCs.
RAM can have some performance issues
an SA should know about.
·
Most RAM is for dual channel use, which requires DIMMs to
be installed in identical pairs and in specific slots on the motherboard. This
doesn’t always happen at the factory, and then the BIOS will default to single
channel mode, halving the speed! You should visually inspect that the RAM
is installed correctly.
·
Another issue is that RAM reports to BIOS on POST its maximum
speed (using SPD or XMS method), but some BIOSes will ignore that and default
to some safe, slow speed! You can sometimes set BIOS parameters to override
that, to get the maximum speed you paid for.
·
Finally, the speed of the RAM and CPU is used by the BIOS to set
the bus speed. Cheaper RAM has fewer operating speeds (“modes”), and this
limits the CPU multiplier that can be used, thus slowing the whole bus. Suppose
you have a 2.4 GHz CPU. Using 667 MHz DDR2 RAM will end up setting the bus to
300 MHz (and a CPU multiplier of 8). Upgrading to 800 MHz DDR2 will result in
a bus speed of 400 MHz (and a 6x CPU multiplier).
This table from an Ars
Technica post shows the memory hierarchy:
Level Access time Typical
size
Registers "instantaneous" under
1KB
Level 1 Cache 1-3 ns 64KB
per core
Level 2 Cache 3-10 ns 256KB
per core
Level 3 Cache 10-20 ns 2-20 MB
per chip
Main Memory 30-60 ns 4-32 GB
per system
Hard Disk 3,000,000-10,000,000 ns over 1TB
Devices Often
called peripherals, these include keyboard, video controllers,
ports, IDE/SCSI controllers, sound, clock, ...). Peripherals generally require
a controller; the device connects to the controller, which is installed in the
computer (using some add-on slot) and connected to the system bus.
Keyboard Input Keyboards
don’t (any longer) send ASCII when any (combination of) keys are struck. For
one thing, many keys have no ASCII (or even Unicode) equivalent (e.g., pgUp). Instead,
the keyboard sends numbers known as scancodes. These are only
roughly standardized. If you have an unusual keyboard you can use the setkeycodes(8) command to remap
some scancodes in the tty driver. (The first 88 scancodes cannot be
re-mapped.)
The kernel’s tty driver also contains a
table called the keymap (see keymaps(5))
that translates scancodes to standard key names called keycodes.
Software sees keycodes on key-pressed/released events. You can see scancodes
and keycodes in a non-GUI console window using showkey(1) command.
Many standard keymaps are available for
different keyboards (e.g., UK keyboards, German keyboards, etc.) The keymap
translates sequences of scancodes into keycodes. Use loadkeys(1) / dumpkeys(1) to change/view the
keymap table. (e.g., disable/move caps lock, define function and other extra
keys, etc.
The keyboard driver translates keycode
sequences into Unicode (e.g., ALT+,+c = ç) or some action (e.g., CTL+C sends a
signal), determines what strings to send when function keys are pressed, and
the effects of modifier (shift, alt, etc.) keys.
The readline(1)
library, used by shell, mysql, psql, ..., allows you to bind keycodes to
arbitrary meanings (e.g., symbols, Unicode, shell commands, etc.) with bind or ~/.inputrc. It is readline
that provides a history mechanism for these commands, and allows input editing.
Finally keep in mind this console
tty driver isn’t used for USB keyboards, remote SSH sessions, or GUI (X window)
sessions, so updating scancodes or keymaps has no effect in these cases.
(X has its own keyboard driver and you can remap its keycode table using xmodmap, discussed later.)
Solaris/Sparc systems use keyboards with an extra key,
“STOP”. During the boot process you take control by hitting keys such as
“STOP-A” (the STOP and the A key simultaneously).
Networking Hardware
Stuff you should know: NICs, static
(manually set) versus dynamic (automatically set) networking
information (parameters) including IP address, mask, default
gateway IP address (default route), DNS server(s) (up to 3)
IP addresses, DNS hostname, DNS domain-name, (FQDN), and default
DNS domain name. Usually set dynamically with DHCP. (Discuss many
“hostnames” issue: NIS, per system, NetBIOS, or DNS. Similar issues with
“domain-name”.) RH GUI tools get these confused and won’t always work.
How can you tell which hardware will work with your OS?
Proprietary Unix (not to mention Mac and Windows) vendors maintain hardware
compatibility lists. Some major Linux vendors do as well (such as Red Hat). However, many users send hardware
compatibility reports to various places that anyone can check, such as smolts.org or the ones
listed at linux-drivers.org.
System Clock
Traditionally, hardware generates a tick
event every so often; this is the CPU (and FSB if you have one) clock speed,
often 3GHz or more today.
The kernel maintains a software clock
known as the system clock with a lower resolution: every so many hardware
ticks, a software tick count is incremented. This counter is the system clock
used by the date command.
The tick frequency can be adjusted in
some cases to better match graphic card processing speeds (for serious
gamers). In Linux, this is controlled by the kernel value HZ, which in turn sets the
duration of a software clock tick called a jiffy. (See time(7).) On Linux, a jiffy is usually
4 mSec. (On Windows 7, it is 15.6 mSec.) (In short: the hardware generates
ticks, counted by the kernel, and every so many hardware ticks (depending on
HZ) a software tick event is generated and the system clock updated.)
A problem with this scheme is that the
CPU must handle a tick event every jiffy. Processors these days all have power
management capabilities. When they have no work to do, they can be put into some
low-power state, drastically reducing their power consumption. The more time
they can spend asleep, the less power they use. With this kind of processor,
that periodic tick is a liability. It means that even when the processor has
nothing useful to do, it will be awakened every jiffy just to update a counter
and then go back to sleep.
For some time now, most kernels support
tickless kernels, also known as dynamic tick. Linux integrated
support for this in 2007, and more recently OS X is also tickless. Windows 8
is tickless too. With a tickless kernel, instead of indiscriminately making
the timer fire every few milliseconds the kernel takes a look at all the timed
events outstanding. It then sets the timer for the earliest timed event it has
to wait for. So if the shortest wait the system has to attend to is 200
milliseconds, then the timer will be set for 200 milliseconds. This allows the
CPU to remain in the low power state longer.
Power-On Cycle
When the power is turned on, the CPU
starts executing a firmware program (often called BIOS) stored in nonvolatile
memory. (Newer systems have replaced BIOS with EFI, discussed later.) (FYI: BIOS
starts at address 0xFFFF0, not 0 as you might have expected.) BIOS varies by
motherboard brand. Often the term system firmware (or just firmware
alone) is used to refer to this BIOS/EFI firmware.
The first thing the firmware does is to
detect and test the hardware. After this POST (power on self-test),
the BIOS finds and initializes keyboard and monitor. (Sometimes, part of the
POST runs after the monitor is initialized, so results can be displayed.) The
CMOS memory (a type of volatile RAM backed by a battery) holds various
settings) is examined and the settings stored there are applied. Boot devices
(and some other hardware such as the bus controller, the keyboard controller,
etc.) are located and initialized.
Finally, the operating system kernel
must be found and loaded into RAM. With traditional BIOS and DOS disks, the MBR
of the first disk on the first controller is examined for a kernel loader
program; if not found then the loader in the active partition’s
boot blocks is used. If none is found there either, the disk is not bootable
and other disk drives may be tried.
In the past, BIOS has been
proprietary firmware provided by the motherboard manufacturer. OpenBoot
is BIOS defined by IEEE Standard 1275-1994, Standard for Boot Firmware,
and is used on Solaris SPARC and a few other server platforms. (See Solaris
console operations or the Solaris
OpenBoot Reference Manuals for more info.) For Linux, a group of
developers wanted a non-proprietary version and started the LinuxBIOS project,
now called coreboot. However, all of
this BIOS stuff has been displaced by newer firmware called UEFI (discussed later).
This firmware is executed immediately
after you turn on your system. See man pages for kernel, eeprom. The OpenBoot firmware can be configured for
interactive booting; it will pause for user instructions after the POST; the
prompt is “ok> ”.
Related to the power supply are the features suspend
and hibernate.
Suspend means to put
the DRAM (main memory) into a low-power state, and shut down as much of the
rest of the computer as possible. You can leave a laptop or desktop in
suspend, but it will slowly drain the batteries of a laptop unless plugged into
a recharger.
Hibernate saves
the content of your RAM to the hard drive using swap space, then shuts down the
computer completely. This feature is unavailable unless you configure enough
swap space.
Laptops can benefit from a hybrid approach that
saves memory to disk, then suspends. If the battery runs out, your PC can
resume from hibernate; otherwise it resumes from suspend.
The primary
tasks of the system firmware are to:
·
Determine the hardware configuration
·
Test (POST) and initialize the system hardware (Qu: What
hardware?)
·
Provide interactive debugging facilities for testing hardware and
software, for setting the hardware clock, and for changing CMOS settings
·
Boot the operating system from either a mass storage device or
from a network, using an OS loader (that the firmware searches for)
OS loader (or
boot loader or boot manager) is located by the
system firmware in order to load the actual operating system into memory. For
older BIOS/DOS disks, the loader is read from the MBR (Master Boot Record)
of the selected boot device, if present. If not, the firmware looks in the boot
block of the active partition for a loader (used with dual booting).
For EFI/GPT disks, the boot loader is
just a program that can be read from the disk, often called grub.efi or elilo.efi. (Not having to fit the loader into a single
disk sector is one advantage of EFI.)
A feature of UEFI is secure boot, which requires
the hardware check the digital signature of firmware, then have the firmware
check the digital signature of the kernel. Microsoft made a deal with some
hardware vendors to include only its public key in hardware.
To support Linux, Ubuntu and Red Hat have developed a
“shim” boot loader, signed by Microsoft, which in turn loads GRUB (the regular
boot loader). The Linux foundation has developed a pre-loader loader that is
similar to the shim loader, only it doesn’t check the signature of the full
loader (GRUB).
On some systems you can change a CMOS setting to disable
secure boot.
Some common OS loaders for Linux that
work with other systems as well (MS, Solaris) are LILO (and the EFI version, elilo) and GRUB (the most common today). loadlin.exe is used when HW must be
initialized from DOS drivers (very rare anymore). PowerPC systems use yaboot. Also common is efilinux.
An excellent source of information on boot loaders (and in
particular, for UEFI) can be found at rodsbooks.com.
For bootable removable media, such as
bootable CDs, DVDs, Flash, etc., the ISOLINUX boot loader
is often used. (It is related to other loaders from the same group, SYSLINUX).
To see which loader is in use for MBR
disks, run bootinfoscrypt:
sudo bootinfoscript --stdout | awk '/______________/ {exit}; {print
$0}'
GRUB is used directly by PCs using traditional BIOS boot.
However, some PCs do not support BIOS boot anymore, only UEFI boot.
The open source firmware Das U-Boot contains a partial
implementation of the UEFI specification. (A complete open source
implementation is offered by TianoCore EDK II. Companies like Phoenix offer
closed source UEFI firmware.)
On the 64-bit ARM architecture, Some Linux distributions
such as SuSE and Fedora use U-Boot to load GRUB as a UEFI application from
U-Boot. GRUB in turn loads and starts the Linux kernel via UEFI API calls.
Note Linux itself has an UEFI stub so it can be started as a UEFI application
on Intel x64 architectures.
Because the MBR or boot block is
limited in size (446 bytes for the loader code), BIOS-based OS loaders have two
(or more) stages. Only the first stage is in the boot block/MBR. This
software locates and loads the second stage loader from someplace, often the
unused space between the MBR and the first partition, or in the boot partition,
which can be a much larger program. (The initial stage is so small, it used
BIOS calls to read sectors using LBA addresses.) This first stage loads a
second stage, which may load another stage, which in turn actually loads the
OS, according to its configuration. With GRUB, the second stage is considered
part of the first one; both together are called the Grub core. That loads Grub
modules, usually filesystem drivers. Mention coreboot
(formerly LinuxBIOS), with a 3 second boot (!), mkbootdisk, uname
(and who -r).
Even before an OS is loaded, some firmware
may be available to control the boot process, perform remote management
functions, and various configuration tasks. This firmware is usually called LOM,
or Lights Out Management.
LOM is the standard system controller
for remote out-of-band management (often uses a separate, dedicated NIC) for
many types of servers and some Apple computers and PCs. The
hardware involved is usually called the baseboard management controller
or BMC. The BMC is usually a system on a chip (SoC) that you find
in various devices and smartphones.
LOM functions
include monitoring, logging, alerting, and basic control of the system. LOM is
particularly useful for remotely managing a server in a typical “lights out”
(loss of local power) environment, hence the name. (Note, the new UEFI
standard provides many of the features of LOM; both can be used if desired.)
Intel developed IPMI, an open
standard for implementing LOM, supported by Dell, HP, and others. You can usually get to that by powering up while holding
down the F12 key.
MEBx (Intel’s newest version of LOM) runs
digitally-signed code from Intel, meaning end users have no control over the
system. (Neither to virus writters!) This system can run even when the main
system is turned off (hence the term LOM) and can invisibly use your NIC if
there isn’t a separate LOM-dedicated one. The only requirement is access to network
IP ports 16992 and 16993.
Separate from LOM is a new (2010) Intel CPU feature. Trusted
Boot (tboot) is a pre-kernel module for Linux that uses Intel’s Trusted
Execution Technology (TXT) to check to make sure system files haven’t been
tampered with, before letting the system boot. (Windows supports TXT too.)
This offers protection against rootkits and other types of malware that try to edit
system files. (It also allows vendors to enforce DRM.) This is related to secure
boot.
Secure
Boot with Trusted Platform Module
The modern boot process is made more complex
(if that’s even possible) by secure boot features. To start with, many PCs and
servers today (2020) include hardware called a Trusted Platform Module
(TPM). Like the BMC, the TPM is a SoC, meaning it includes its
own CPU and firmware. The TPM typically is installed directly onto the
motherboard and uses either the LPC or SPI bus to communicate with the rest of
the system. There is a standard for TPM, ISO/IEC 11889.
The TPM includes a hardware random
number generator and various crypto keys in ROM, and can be used for several
purposes. The TPM can generate cryptographically strong hashes of the system’s
hardware and firmware, and can present that to external systems wanting to
validate the system (known as remote attestation). Finally, the TPM can
be used to encrypt/decrypt other data if asked. When hardware/firmware hash is
included in the process, the terms sealing/unsealing are used instead. This
ensures no data can be decrypted for any firmware or software unless the system
is in the exact same state as when it was encrypted.
Primarily the TPM boots first, even
before the BMC, and is used to validate its own firmware, then the BMC
firmware, the UEFI firmware, and all other firmware. Only when this is done is
the BMC released to run, which (as discussed earlier) holds the main CPU until
it runs its own checks. (EUFI also has its own security checks.)
Note that a TPM can validate the
firmware is the expected firmware, but not that such firmware is secure with no
vulnerabilities. Some companies therefore add additional hardware to augment
TPM functions. Some of these include Intel’s Boot Guard, Google’s Titan, and
Apple’s T2. (Apple’s solution prevents repurposing the computer to run
non-Apple software such as Windows, ChromeOS, or Linux.)
The whole secure boot process is much like a relay race,
where one team member passes a baton to another during the race. In a relay
race, the team members know each other but when booting a computer, each step
must be validated as the one expected, before control is passed to it.
The Boot
Loader
The boot loader need not be installed
on the same disk as the bootable partition. You can for example use a USB disk
to hold GRUB, which in turn could be used to boot the real disk. A USB drive
can also be useful when GRUB can’t access the real drive (e.g., with
non-standard SAN adapter hardware). Boot from the USB system instead.
“Live distros” on read-write media such as flash disks, can
also include some persistence; they need not be completely read-only.
The Sys V
Boot Process (discussed in detail later.)
“Boot” comes from bootstrap,
an old (Greek?) story of trying to lift oneself off the ground by pulling on
your bootstraps (shoelaces). Old days: set toggle switches on the computer to
enter instructions manually into RAM. After POST (some) hardware is discovered
by probing, which is then initialized monitor, keyboard, mouse, disk
controller, and disk. The OS loader is found, a small (<500 bytes) program
in the boot block, it loads the kernel and supplies some initial parameters.
Some Unix systems (those
not using standard Intel-architecture hardware) include extra steps. They ship
with extra firmware, which is like an extended BIOS, that usually
includes a diagnostic console where you can run limited commands to alter the
boot process. It also includes the boot loader, so you can pass kernel
parameters, boot into different run levels, etc. (For generic IA hardware, you
need a generic boot loader such as GRUB to provide most of that functionality.)
For IA, the boot process
uses BIOS to access and read the boot blocks of the disk (partition) containing
the loader program. The OS loader also uses BIOS to access the boot partition
to read various files including the kernel. Thus the boot partition must be
readable by BIOS, so no fancy FS types or exotic disk technology for that.
The kernel is loaded and
starts to run. One of its first tasks it to mount the root
partition. If the kernel doesn’t have the correct drivers compiled in to
access that type of disk and FS type, it won’t be able to mount root. Many
distros keep the kernel small by using loadable kernel modules (LKMs)
for various drivers, such as SCSI, LVM, etc.
But you can’t load LKMs
unless you can read them! The solution is to compile a kernel with the
required drivers, or use an initial ram disk (initrd or initramfs).
The kernel does have a driver compiled in for ram disks, so if a striped down
version of the root filesystem were put into a RAM disk image file in the boot
partition (“initrd-version.img”
or “initramfs-version.img”),
the kernel could read and mount that, load required LKMs, then destroy the RAM
disk and mount the real root partition.
Once the root
partition is mounted, the first and only process started in the boot process is
init. (A modern kernel
is organized as several independent internal or pseudo processes, shown
in [...] in ps output. The “/#”
indicate which CPU the pseudo process is running on.) init (according to its configuration file, often /etc/inittab or /etc/rc.conf) starts various
programs and scripts. The scripts perform such tasks as check for new
hardware, mount and check disks (with fsck),
clean /tmp, initialize
networking, etc. Examples of the daemons started are cron (and at),
mail, console (and serial port) connection-detection (getty/mingetty),
XDM, printing, database, xinetd,
SSH, etc.
A daemon is a service process that runs in
the background and supervises the system or provides functionality to other
processes.
The program to start can be
changed on the boot command line (init=path). This is sometime useful
to trouble-shoot your system: init=/bin/sh.
System
Shutdown
System stops all user
processes, stops daemons, syncs
inode tables to disk, and finally stops all processes and (hardware
permitting) turns off the power. Note some systems have a UPS that can
start/stop the system automatically.
halt,
poweroff, reboot, shutdown {-r|-h}
now. (Unix shutdown is slightly
different between vendors.) /etc/nologin
to prevent logins during lengthy shutdown; remember to remove when
rebooting. Linux supports using /var/run/nologin
instead, which is on a RAM disk and thus the file disappears after a reboot. /sbin/nologin and /etc/nologin.txt (the message shown by
/sbin/nologin) can be used as a
user’s shell, to prevent that user from logging in; there are other ways to do
this as well. Use the ftpshut
cmd to notify ftp users of impending shutdown (ftprestart
to cancel), which creates the file /etc/shutmsg
(default filename used). Other services that have remote sessions (such as
Apache) often have ways to prevent new sessions without dropping current ones.
At GUI login (XDM), there is usually
menu choices for reboot and shutdown. At console, you can configure the system
to allow halt, reboot and shutdown without a login
required. Note that at any time, CONTROL+ALT+DELETE
(aka the three-fingered salute, the Vulcan nerve pinch) will
reboot the system. This default behavior can be changed.
On Linux, a special combination of keys will perform
various shutdown and reboot functions, even if the GUI is frozen. Called the magic
SysRq keys, you hold down ALT+SysRq+<command-letter>. (The
SysRq key is often labeled “Print Screen”.) To safely reboot a frozen
computer, use this sequence of commands (remember to hold down ALT+SysRq):
REISUB. See Wikipedia’s
SysRq page for documentation. Note, only the left ALT key works for this.
Such commands are limited by default to
root and users at the console (via PAM). The shutdown
command also has a list of users allowed to use it from anywhere.
Never use the /etc/shutdown.allow file! It
doesn’t actually check if the user running shutdown is listed,
it checks if a user listed is logged in at the console. So if root is listed,
and some SA leave root logged in on the console, any user anywhere can shut down
the system!
GRUB
(Adapted from help.ubuntu.com/community/Grub2)
A new version of GRUB, GRUB2, is in use
on most systems today (2016) such as Ubuntu and newer Fedora systems. It differs
from GRUB (version 1, also known as GRUB legacy) in a number of ways:
·
GRUB 2 supports both BIOS/DOS disks as well as newer EFI/GPT
disks. (Fedora 14 and some older versions include a patched version of GRUB
legacy, that does support EFI/GPT very well.)
·
No /boot/grub/menu.lst
(or .../grub.conf). (/etc/grub.conf was a symlink to that
file.) It has been replaced by /boot/grub/grub.cfg,
which is not meant to be edited manually, even by “root”. The grub.cfg file is overwritten anytime
there is an update, a kernel is added/removed, or the SA runs update-grub.
·
The primary configuration file for changing menu display settings
is /etc/default/grub. There
are also the files (shell scripts) in the /etc/grub.d/
directory. While you can edit the existing files, to customize the kernel
options for instance, these files get rewritten whenever GRUB2 is updated. If
you want the same options used on all your menu items, you should edit the
default options list in the /etc/default/grub
file.
·
The files in /etc/grub.d
should all be executable shell scripts. When run (by update-grub) they append data to the generated grub.cfg file under /boot/grub. The placement of the menu
items in the GRUB boot menu is determined by the order in which these files are
run. Files with a leading numeral are executed first, beginning with the
lowest number. 10_linux is run
before 20_memtest, which would
run before 40_custom. If files
with alphabetic names exist, they are run after the numerically named files.
You can turn off any of these files by removing execute permission from them.
·
Custom menu entries should be added to the 40_custom file or in new files.
Based on its name, 40_custom
entries by default appear at the bottom of the menu. A custom file beginning
with 06_ would appear at the top
of the menu since its alphanumeric sorting would place it ahead of 10_ through 40_ files.
·
After making any changes to any of the GRUB 2 configuration
files, you must run update-grub
on Ubuntu and most other distros. On Fedora and RH-based distros, you must run
the command “grub2-mkconfig -o /boot/grub2/grub.cfg” instead. These commands update
the real config file used by the boot loader. No changes made in the
configuration files will take effect until this command is run. Also,
automated searches for other operating systems (such as Windows) runs whenever either
command is executed. (See also the grubby(8)
command, run automatically when the kernel is updated, to update grub.cfg directly.)
If you are booting using UEFI, a different config file is
used. Run:
grub2-mkconfig
-o /etc/grub2-efi.cfg
But if you are booting using classic BIOS
boot, run:
grub2-mkconfig
-o /etc/grub2.cfg
·
GRUB2 numbers partitions starting at 1 (one) instead of 0
(zero). Disks are still numbered from zero, so (HD0,1) would be the first partition on the first disk.
·
GRUB Stage 1.5 has been eliminated. Additional filesystem types
are directly supported by stage 1.
·
To find out where (which disk) GRUB 2 is installed, the user can
run the following commands: grub2-probe
-t device /boot/grub for the device and grub2-probe
-t fs_uuid /boot/grub for the UUID.
The
contents of the /etc/default/grub
configuration file are used by the shell scripts in /etc/grub.d. However, the configuration items can vary
between systems. Some of the options you may want to edit in this file are:
· GRUB_HIDDEN_TIMEOUT — If you don’t
comment out the *HIDDEN* items
the GRUB menu will not show. This is a number of seconds to display the splash
image while waiting for the user to hit the SHIFT key, to display the menu.
· GRUB_TIMEOUT — The number of seconds
to show the menu, if it is shown at all. Set to -1 to disable the timeout (and
thus wait for the user).
· GRUB_DEFAULT — Set this to a number,
to default to that entry in the menu to boot. (The first entry is numbered
zero.) Note that since the menu is changed if additional kernels or operating
systems (or if you add custom menu entries), the order of menu entries can
change unexpectedly. You can also set this to the word “saved” to boot the
most recently booted item.
· GRUB_CMDLINE_DEFAULT — This is set to
a string which is appended to the kernel line (passed as parameters to the
kernel), when booting in normal mode, for all Linux kernel menu entries.
· GRUB_CMDLINE — Appended to the kernel
line in both normal and rescue modes.
Many useful command-line options are found in dracut.cmdline(7).
See
the Ubuntu.com
wiki site for a complete list. Remember to run update-grub
(on Debian-based systems) or grub2-mkconfig
(on RH-based systems) after making any changes. The official GRUB
documentation can be found at gnu.org.
File Systems and Disk
Formatting — the Short Explanation
The term filesystem has several
meanings. One is the collection of files and directories on some host: the
whole tree from “/”. Another is
the type (structure of) a storage volume: ext2, FAT32, etc. Filesystem
can also refer the type of storage or its access: disk-based, networked, or
virtual. Today hard disks are by far the most used data storage devices and
an SA must know a lot about them.
Formatting a disk has two
meanings: a low-level format, done once at the factory
(but redo to map out bad blocks). Once that is done, you can partition
a disk (not generally considered “formatting”) into one or more storage
volumes.
Formatting a storage volume by
initializing it with some filesystem type is a high-level format.
Technically, “formatting a disk” only means a low-level
format and any partitioning or creation of storage volumes. A high-level
format is really “formatting a storage volume” but is is common to refer to
both tasks as “formatting a disk”. I prefer the terms low-level and high-level
format, but these terms are not standard.
A disk partition is a contiguous
set of disk sectors. Traditionally, partitions were on cylinder boundaries,
but since modern disks lie about the geometry you should ignore that. (SSDs
don’t have cylinders anyway.) A small table at the beginning of the disk lists
the partitions, including their start block and size (and other information).
The partition table is modified or
examined with fdisk (or
GUI equivalent) on all BIOS/DOS disk systems that have the partition table in
the MBR, as well as GPT disks (modern fdisk only). Other tools include gdisk (or GUI equivalent) for GPT
disks, or mdadm (or Solaris
metainit) to format software
RAID virtual disks; note modern LVM supports RAID directly. (Modern Windows
systems use diskpart for DOS or
GPT disks.) parted or the GUI gparted can manage either DOS
disks or GPT disks. (Demo fdisk -l; parted -l; on /dev/sda.)
(If planning to use ZFS, BtrFS, or
BetrFS, you generally use the whole disk (except maybe for a boot partition) as
a single storage volume, and use the filesystem features to create
“sub-volumes”. So no partitioning or logical volumes are used in such cases.)
Note that using gdisk on a DOS/MBR disk will
convert it to a GPT disk, with a protective MBR added as necessary.
High-level formatting (putting
a filesystem into a volume) is done with mkfs
(or a filesystem-specific tool such as format
or newfs).
Common FS types (discussed
and compared later): FAT*, vfat (pcfs or dos on some OSes; a.k.a.
FAT32), exFAT, NTFS, and soon, ReFS (Microsoft’s upcoming successor to NTFS).
Non-Microsoft FS types include UFS (Common to many Unix flavors; a.k.a.
FFS on some OSes), ZFS (Sun’s successor to UFS and open sourced), ext2, ext3,
and ext4 (current Linux standard), Btrfs (future Linux standard similar
to ZFS), ReiserFS, JFS (and JFS2), XFS, VxFS and freevxfs (SCO, Solaris, ...),
HFS, HFS+, HFSX, JHFSX (Macintosh), HPFS (OS/2). Note the safer FS types use a
technique taken from database technology known as journaling (discussed
later).
FAT (or NTFS) is used on most small flash
and other small removable media. Larger flash disks use exFAT or NTFS; but can
be formatted as any type you wish, just like any disk. A new (2012) choice is
the F2FS, or flash-friendly
file system. (See also F2FS
design notes.) MS also has a proprietary, patented flash filesystem called
exFAT, similar to FAT32. (In
2013, Apple licensed exFAT to allow easier file sharing via Flash drives.)
ExFAT doesn’t support journaling or permission, but add-ons to it may (e.g.,
TFAT).
For data CDs, iso9660 (Linux) a.k.a.
hsfs (Solaris, High Sierra FS). Default is “8.3” ASCII file names.
Rock Ridge extension allows long filenames and symlinks, Joliet
extension allows Unicode, and El Torito allows bootable CDs.
DVDs (and some CD-RWs) use udf (a.k.a. UDFS) or iso9660.
Note, extent-based FSes rarely
need defragmenting; they work well regardless until nearly full. A
defragmented FS will still perform better than a fragmented one; the difference
isn’t as large using extent-based FSes. (Fragmentation is discussed later.)
All filesystems suffer from data corruption. To check and
repair them, you use the fsck utility for that type of
filesystem. (See below for details.)
Device
Naming (and Partition Numbering) Schemes:
All hardware has a physical (or instance)
name, which shows its location in the device hierarchy. This is a tree-like
view. Each device is identified by its position on some bus; each bus is
connected to another bus, up to the top of the system.
Physical devices are found by probing
the buses to see what’s plugged into them. This information is collected by
the kernel and exposed through sysfs (Linux) mounted at /sys, or devfs (Solaris)
mounted at /devices.
The physical names are long and rarely
used. Instead, software uses the device logical names defined under /dev.
Internally the kernel uses instance names to
refer to devices, such as “eth0” or “tty0”. Solaris has a file, /etc/path_to_inst
to show which instance names map to which physical names. Linux has no such
file; you need to use various ls* commands and look under /sys. Often the error logs show only instance names.
Linux: /dev/sdXY for SCSI disks.
(Note X has no relationship to the SCSI ID.)
/dev/hdXY, X=a, b, ... for each IDE
controller slot., Y=1, 2, ... for each partition.
Linux now uses the SCSI code to
handle all disks, so “hdXY” no longer used.
/dev/sda4
= ZIP (zip always use partition 4 for whole disk).
/dev/fdX
= floppy X=0, 1, 2, ... (Note fd0H1440 for different formats)
/dev/ttySX,
X=0, 1, 2, ... serial ports
/dev/lpX
= X=0, 1, 2, ... parallel ports
/dev/loopX
= X=0, 1, 2, ... loopback device (for mounting image files)
/dev/sgX,
X=0, 1, 2, ... Generic SCSI devices.
(These include “fake” SCSI devices
such as USB scanners, cameras, joysticks, mice, and sometimes flash drives.
Some USB devices pretend to be SCSI disks and have sdX names instead.)
Modern systems use daemons such as udev to populate /dev. These can organize the
device names differently, usually in a deep hierarchy (find /dev -type d).
However, the traditional names are still provided as symlinks.
Some devices don’t traditionally get
names under /dev, such as
network devices that can’t read/write bytes (or blocks) at a time. This is
most commonly seen for Ethernet or PPP devices. On Linux, Ethernet devices are
traditionally named eth<num>. Some systems (e.g., Fedora since 15)
uses a new naming scheme, but the old scheme is still supported in many cases
(e.g., virtual machines), or by passing parameters on the kernel command line
(with GRUB).
FreeBSD
Device Names
BSD names devices after the
device driver used: /dev/acdn for IDE CD drives, /dev/adnspl for ATA and SATA (IDE)
disks (n=drive number, p=slice (a.k.a. DOS partition), l=BSD
partition letter (a.k.a. Solaris slice). /dev/cdn
for SCSI CDs and /dev/danspl
for SCSI disks. As on Solaris, BSD partition a is for the root slice, b
is for the swap slice, c is for the whole disk. As with Solaris, there
are 8 BSD partitions (slices) per slice (Linux partition); letters a to h.
Solaris
Device Names (for Solaris 10 and older, when not using ZFS):
Actual device names are in /devices (the Solaris equivalent of /sys) but uses links from /dev.
Solaris has software RAID
using “md” virtual disks. To
see what disk /dev/md/dsk/d33
really is: metastat .../d33.
The
naming scheme for Solaris disks is:
IDE: /dev/[r]dsk/cAdBsC (A=controller#,
B=disk#, C=slice#).
SCSI: /dev/[r]dsk/cAtBdCsD
(A=controller #, B=SCSI-ID (device #), C=LUN #
(usually zero), D=slice #) and /dev/sdnx
(n=disk num, x=slice letter). Solaris historical partitions:
a=root, b=swap, ...
Example: /dev/dsk/c0t0d0s1 or /dev/sd0b.
On x86 systems, Solaris uses “pP” instead of “sD” in the name to refer to
partitions rather than slices; “P”
is the partition number (zero means whole disk). p1 to p4
are the 4 primary “fdisk” partitions, P
> 4 refers to logical partitions. Ex: c0t0d0p2.
/dev/lofi/X
= X=0, 1, 2, ... loopback device (for mounting image files)
How GRUB
Names Devices
The floppy disk (if any) is named as (fd0) — first floppy. GRUB can
only reference a single network interface as (nd),
and this is almost always the interface the system firmware probed and
configured via DHCP. It is also possible to configure a network interface by
booting GRUB from floppy or other local media.
Hard disk names start with hd and a number, where 0 maps to the first disk found by
the BIOS, 1 maps to second,
and so on.
A second number can be used to specify
one of the partitions identified by fdisk
or gdisk (starting with 0 for GRUB legacy, or 1 for GRUB2). So (hd0,1) would be the first partition
on the first disk.
(hd0,5)
specifies the first logical partition of the first hard disk drive. The
partition numbers for logical partitions are counted from 5 regardless of the
actual number of primary partitions on your hard disk. Note in GRUB1, it would
be (hd0,4) instead.
Also, remember EFI/GPT disks don’t have
extended or logical partitions at all. they are just number from 1, up.
(hd1,a)
Means the BSD “a” partition (slice)
of the second hard disk. If you need to specify which PC slice number (i.e.,
fdisk partition number) should be used, use something like this: “(hd0,1,a)”. If the pc slice
number is omitted, GRUB searches for the first pc slice which has a BSD “a” partition.
Controlling
the System Boot Process
At boot loader prompt (LILO or grub
for Linux), you can control how the system boots up by choosing the run
level and setting other parameters. For disaster recovery (e.g., you
corrupted some critical files in /etc),
you must boot into run-level 1, called single user mode (or
sometimes maintenance mode or rescue mode). At the LILO prompt,
enter the word single (or number
1, or the letter S) after the name of the OS to boot:
LILO: linux single
If using GRUB, you add single (or 1) to the end of the kernel (or for GRUB2, linux) line. Demo using GRUB.
Fedora also supports an “emergency” mode that starts a
shell on the console, without running any other initialization scripts.
This is not usually what you want. Usually, you want “rescue” mode. There is also a confirm mode, which makes you type
y or n to run or skip service startup (or c to continue without confirming the
remaining steps).
You can also use a digit to specify the
run-level to boot. (Digits work for the systemd and upstart init
systems as well, although those init systems have other parameters to control
the boot process.) The default run-level is listed in /etc/inittab for Sys V init, and elsewhere for upstart,
SMF, systemd, or other init systems. Note “1”
is a synonym for “single user mode”.
If running Red Hat Linux, you can
control whether or not to use XDM (GUI). If the default is to use XDM and
today you don’t want to, enter linux
3 at the boot loader
prompt. If you normally don’t run XDM but today you wish to, enter a 5 instead. Different *nix systems
will use different values.
Non-SysV systems (such as *BSD ones)
don’t provide as many run-levels, only single-user mode and multi-user
mode. Because of this, there is no inittab
file and no directories named after run-levels. You can’t control if XDM
starts by specifying a run-level as shown above. There is no telinit program either; you use reboot, halt,
and shutdown, or type stuff on
the console while booting to determine run-level. BSD does have “security
levels” but that is different. See the BSD man pages for init and rc for details.
Modern versions of LILO and GRUB have
GUI boot loader programs. To get to a LILO: prompt, type CONTROL+X.
If using GRUB, hit ‘e’ to edit the command line, which in
GRUB will show a secondary window with several lines in it. Move the cursor to
the kernel (or linux) line and hit ‘e’ again. Now you can add the word single (or the digit 1) to boot to single user mode, or a
number to boot to that run level. After you hit enter, you will see the
modified command line showing. Hit ‘b’
(GRUB2: ^X) to boot.
The kernel parameters are documented in
man bootparam (which may be out of
date) and in the kernel-parameters.txt file, part
of the Linux kernel documentation. Generally, these parameters are used to
over-ride hardware parameters such as IRQ, DMA, I/O, and other settings. You
can also pass parameters to parts of the kernel or to init, to configure
various features (such as the console initial video mode: #line, font, ...).
Two options to consider for Linux are “quiet”, which suppresses kernel
log messages, and “audit=1”,
which will enable audit log messages. (This flag is undocumented, perhaps
because auditing is enabled by default in Linux now.) Run “auditctl -s” as root to check the current status.
In addition to kernel parameters and an
init parameter (the run-level),
additional parameters can be placed on the boot line. The list of these varies
by system and is generally not documented in any one place.
The parameters used to boot the system can be read from /proc/cmdline. These are
processed by the kernel, init,
and the boot-up scripts and commands. The ones recognized by the kernel and init should be documented in the man
pages (or someplace). For Sys V init systems, you can run this:
grep cmdline /etc/rc.d/{,init.d/}*
to see the parameters you can set on your system, that boot
scripts will use. (Note that systemd and upstart systems use
different files.) Systemd documents these in the man page kernel-command-line(7).
One common change to remove is “rhgb”
for Red Hat Graphical Boot, to boot much faster, and display more
diagnostic messages, by not stating X until later.
Some Fedora and other Linux distros use the plymouth graphical
boot instead. Unfortunately, the sequence of
switching from text mode to rhgb’s X server to text mode to
the display manager’s X server can cause significant screen flickering. Another
major drawback of rhgb is that boot messages
are not logged.
The main objective behind Plymouth is to provide a flicker
free system booting experience; as Ray Strode put it, “the ugly details of boot
up” are hidden behind a graphical (and possibly animated) splash screen. A
secondary objective is to log the boot sequence. Plymouth is designed to work
on systems with direct rendering manager (DRM) kernel modesetting
(KMS) drivers. If you have that, there is no flicker. Otherwise, plymouth
defaults to normal X rendering (and thus flicker) or a text mode.
Plymouth graphical boot is usually enabled by the “splash” setting in GRUB. Fedora (and probably RH) only have
plymouth, so that setting isn’t needed; just list rhgb on the kernel line. You
can download and use many graphical themes for plymouth. (To themes, use the plymouth(8) command.)
If rhgb is on the kernel’s command
line, rhgb (plymouth) is started early in the boot process. rhgb starts an X server for display :1
on a virtual terminal, so that it avoids conflict with the regular X server
which may be starting for display :0 on another virtual terminal. It
also creates a Unix domain socket (/etc/rhgb/temp/rhgb-socket), so
that boot scripts can communicate with it. As boot scripts execute, they can
use rhgb-client to send messages to rhgb, which then updates the text
and progress display.
When the system is finished booting, rhgb-client is invoked with the –quit option to send a terminate
request to rhgb. The user is then switched to the X server used by the
display manager. All the messages sent to stdout by the daemons as they start
are dumped into boot.log.
Red Hat (and some other) Linuxes: /.unconfigured or /etc/reconfigSys, or ‘reconfig’ is on kernel (linux)
boot cmd line.
Solaris: /reconfigure (or
from PROM cmd line: ok boot
-r). (There is also
a RH sys-unconfig command, and
similar commands for other systems.)
Install CD #1 can be used as rescue
CD to boot to single user mode. Boot it, then mount the faulty hard
disk partitions and fix them. (Works for Solaris too.) You can also try “init=/bin/sh” boot loader option. It
is probably better to try to boot in emergency
or rescue mode instead.
There are several “live” distros designed expressly for
system repair by sys admins, such as Grml. If
you have that on a CD or flash drive, you can use it to rescue systems.
Dracut
Dracut is used to control
the initial part of the kernel boot process. Typically, this involves
maintaining RAM disk image files. To make an updated boot RAM disk image
file for the currently running Linux kernel, use the command:
dracut /boot/initramfs-$(uname -r).img
$(uname -r)
To generate a new image
for a particular kernel version, specify that version; “uname -r”
reports the current version. For example:
dracut
/boot/initrd-3.4.2-31.img 3.4.2-31
The older command was
named mkinitrd; if your system
doesn’t have dracut, see if it
has the older (or a different) tool.
When you’ve made changes
to the kernel, or updated kernel modules, or updated some critical
configuration files in /etc (for
example, /etc/fstab), you will
need a new image file. New image files are only created automatically in
some cases, such as when installing a new kernel. (And since Fedora 21,
not always!)
Solaris doesn’t have this issue. At shutdown time,
the system always regenerates the boot disk image file automatically if any
changes were made.
In other cases, you
must generate a new image file manually. To do so for all installed
kernel versions, run:
dracut --regenerate-all
The dracut code that runs at boot time supports some extra
kernel parameters. These are documented in dracut.cmdline(7).
One of the most useful is rd.break, which can drop you down
to a shell at different stages (breakpoints) of the boot process. Use grep 'rd.?break' /usr/lib64/dracut/modules.d/99base/init.sh to find the breakpoints supported by your dracut version.
Then edit the boot
loader’s config file (grub.conf)
and add this line:
initrd
/initramfs-2.6.31.12-174.2.3.fc12.i686.img
An initramfs image
used by dracut (and similar systems) is a gzip compressed “filesystem”; really
it’s just a gziped “cpio”
archive file! The system doesn’t “mount” these images; it just extracts
their contents into some already created (and mounted) ramdisk.
Once the ramdisk is
populated from the image, the script /init
(or /linuxrc) runs if
possible. This can be used to load USB or SCSI drivers for such CD or
floppy drives. (Show how to examine: # gunzip -c /boot/initrd... >/tmp/initrd.cpio; mkdir /tmp/img; cd img;
cpio -i <initrd.cpio; less init)
You can view the
contents of these with the command lsinitrd.
Newer Linux systems have a type of ramdisk (“initramfs”) called “rootfs” that is always
mounted. It is used to ensure there is always something mounted (so the
kernel doesn’t have to check for an empty mount list). rootfs is also used during booting of a Linux kernel, used as the
initial ramdisk. When the real root FS is ready to be mounted, rootfs is
then emptied of files (to free up the RAM). The system switches to the
real root filesystem using a command usually called switch_root or pivot_root. The new root is
mounted right on top of rootfs.
Lecture
3 — Linux Install, Upgrades, Solaris Notes
Get Linux/Unix: http://distrowatch.com/.
To be demonstrated in-class, then
done individually. You will document every step in your system journal.
(Discuss the importance of keeping a journal.) Make sure your journal
has sufficient details so that someone could recreate your system exactly,
without guessing what you did.
Before installing, make sure your
firmware is configured acceptably. For example, UEFI or BIOS. (Note that
running the installer with UEFI/BIOS means the resulting system must be booted
under the same system; you cannot change that later without reinstalling.
Boot the GUI installer for Red Hat and
Fedora, called Anaconda.
This provides multiple terminal windows via “tmux” with various information and
a root shell console, you can use for trouble-shooting your install. See the
anaconda guide above for the keyboard shortcuts you can use to switch between
the consoles.
To switch from the graphical
installation environment to tmux, press Ctrl+Alt+F1. To go back to the main
installation interface which runs in virtual console 6, press Ctrl+Alt+F6. (Once
in tmux, use ^b,1-5 to switch consoles. For example, ^b then 2. 1=main
window, 2=shell prompt, 3-5 various log messages.)
During the install, keep track of
every choice you make. Either write down each choice as you go, or you can
use a feature of the Fedora Anaconda installer: hitting SHIFT+Print_Screen
will make screen-shots and will save them in /tmp/anaconda-screenshots.
/tmp is a RAM disk during the
install, so your screenshots will be lost when you reboot. Before
rebooting, save your screen-shots to your home directory. (Use ^B,2 to get
to the shell, then use cp.)
All installation choices can be changed
later, they are stored in /etc/*.
Also, all your choices are saved in a file, /root/anaconda-ks.cfg,
although that file may not be very easy to read.
Ask about any install choices you don’t
understand. Don’t be afraid to install more than once.
(Instructor’s workstation
configuration: System Settings-->Hardware-->Displays and monitors;
confirm the Dell monitor is primary, and both monitors have same pixel settings
(1029x768); click “Unify outputs”. May need to reboot, but make sure settings
are saved first!)
It is possible to rerun parts of Anaconda later, if you
muck up your system and don’t want to reinstall. Try running the command “systemctl enable initial-setup-graphical.service”, and then reboot. If you don’t have that, try after
installing the package initial-setup.
IaC —
Infrastructure as Code
In large data centers, new servers are
deployed in large numbers (hundreds to thousands). It would be impossible to
maintain accurate system journals for all of them! While system journals
remain a good idea in other situations, for such large-scale operations a
different approach is needed.
In such situations, tools are used to
actually build and deploy new clusters of virtual machines or containers.
These tools can take a description in a text file and use it to install,
configure, test, and deploy servers. Even the network between the racks of
servers is virtualized today (software defined networking), and any
required changes for that can be described in text files too. Tools such as
Puppet, Chef, Ansible, SaltStack, Terraform, and Vagrant can read configuration
description files and do the rest automatically. (You will learn more about
these tools in a future course.)
When deploying a new service or
updating (or retiring) an existing one, the system admin edits these files.
What has this to do with system journals? Well, these files precisely define
exactly what was done. So instead of human-readable journals, you write
machine-readable ones so the steps can be automatically repeated.
The practice is to use versioning
software such as Git to record every change to these files, including when, by
whom, and why (in a commit message). The versioning allows you to see
differences between any two points in time or to see the history of changes.
For this and other reasons, SAs today
need to have some software development skills; creating and editing these files
is similar to writing software.
Pre-Install
Questions to Ask (and Answer)
When planning a new system deployment,
where do you start? Some questions to consider include:
What is the purpose of your system?
Will a single system be enough (or SMP or cluster)? Should you spend the money
on SCSI, RAM, big disks, ...? Will you be building a network (such as a SOHO
or larger)? What kind of network to get (if any)? Where will you put the
equipment (a server closet a.k.a. data center)? What kind of
racks to get? Wire supports? Other equipment (monitor switches, carts, testers,
and monitors, ...) UPS? HVAC? Fire suppression? Security? What sort of
remote administration should be used (KVM, serial console server, ...)? How
many similar hosts must you administer?
Capacity
planning:
Some vendors will tell you to buy a
large number of servers, run the system awhile to see how it performs, and
return the unneeded servers for some sort of refund. There are other ways to
estimate accurately the number of servers required for some service(s) to run
and provide a required average response time (sometimes other performance
requirements too). These include:
·
Build a prototype system (or use the current one if any), measure
performance and response time, and extrapolate the required resources.
·
Trust the vendor to only sell you what you actually need.
·
Estimate the resources needed for each part of the system (web,
DB, email, etc.) and sum these values to obtain an estimate of the whole system
requirements.
·
Calculate the value needed based on the factors of the servers
you are considering: number, type, and speed of CPUs per server, amount and
speed of RAM and disk system, network bandwidth available, and the system’s I/O
performance data.
·
Hire an experienced consultant who does this sort of planning.
Speak with former customers (from a year ago) to see if they were pleased with
the results.
Without experience, the required
mathematical skills, or a huge budget to blow on consultants or needless equipment,
you can use queuing theory to estimate accurately the number of
servers required to provide some specific response time, by plugging in a few
values and graphing the result. There is a formula from Dick Brodine of
National Computing Group (DickBrodine@juno.com),
reported in the July 2006 IEEE Computer (“Mathematical Server Sizing”, pp. 91–93).
This formula is based on one by Kishor S. Trivedi in his book Probability
and Statistics with Reliability, Queuing, and Computer Science Applications,
(C)1982 Prentice-Hall. Trivedi’s model was designed to estimate response time
from a number of factors, assuming a single server. Brodine extended this
formula to measure response time from a cluster; by producing a graph of
response time versus number of servers (once you provide some estimates of
expected load and other data). Brodine hopes to sell his work so the sizing
tool he created is not available to us.
“Wikimedia’s entire collection of web sites—which includes
Wikipedia, Wikisource, Wikiquote, Wikinews, and several others—serves up
roughly 10 billion page views per month. At its peak, traffic can sometimes
reach 50,000 HTTP requests per second. The organization’s hardware budget to
date is roughly $1.5 million, and it spends $35,000 per month on bandwidth and
physical hosting [of over 200 servers]. Its entire technical infrastructure is
managed by a small IT staff consisting of only four paid employees and three
volunteers.”
Source: Wikipedia
adopts Ubuntu for its server infrastructure, Ars Technica post by Ryan
Paul, Published: October 09, 2008.
Post-install Tasks &
Procedures
(Remember to record any changes in
your journal!)
Most of these steps are performed by the installer
(Anaconda for RH, Ubiquity for Ubuntu). Historically, many installers don’t do
all these steps, or don’t do them in sensible or standard ways. You should
check all these items just to be sure they are set the way you want. (Note
we won’t learn how to do many of these until later!)
If you find some step that wasn’t done the way you like,
you can always change it, but think twice first, since other installer software
(and other administrators) may expect defaults settings and pathnames to be the
way the installer set them.
Note that many of these tasks are complicated and
inter-related, and will be discussed at length later in the course.
Remember to record all changes in your journal!
Read the release notes that
accompany your system. Perform any configuration tasks required. In addition,
note any changed/removed/added systems; you may need to update your system
procedures documents as well as any system documentation.
Configure the boot loader. You
will likely want to add or remove kernel parameters. Most boot loaders
(including GRUB) have an adjustable timeout for displaying a boot menu. On
systems where timeout = 0, you
will not be able to interactively boot the system! Consider changing this to 2
or 3 seconds.
Set HOSTNAME
(with static IP; rarely used with DHCP
since name associated with IP address not hosts. RH tools bad.) Discuss
static vs. DHCP, and DNS names. Also may need to set the system nodename
and host ID. (See networking below.)
Setup and run yum (or dnf) update
or non-Red Hat equivalent (Solaris: smpatch,
Debian: apt-get dist-upgrade; run apt-setup first), or use aptitude. Warning: Do not
physically connect computer to an untrusted network until this is done! (Of course,
this could be a catch-22 situation.) Updating a kernel may be difficult and
tricky.
Setup and verify networking.
Verify networking with ifconfig,
ping, route, and netstat.
You may also have to configure PPP or PPPoE.
Create the directory hierarchy for
locally installed software: /usr/local/{bin,lib,man,etc,src}
(or: /opt, /etc/opt, ...)
Set PATH,
MANPATH. Make sure these
point to standard directories for your system, such as /usr/local, /opt/*/bin,
/usr/usb, /usr/lib64/lsb, ..., for PATH and /usr/dt/share/man, /usr/openwin/share/man,
and /usr/sfw/share/man for MANPATH. Note the preformatted man
page location varies; for Red Hat it is in /var/cache/man.
The unformatted (“raw”) man pages are usually in either /usr/man or /usr/share/man,
and local man pages are usually put into /usr/local/man.
Other standard directories for some systems include /opt/*/bin and other places.
The default PATH setting rarely includes
every directory with applications in them. For Solaris the default PATH is /bin:/usr/bin. Some commonly
used “bin” directories can be added to the PATH. This is
actually a problem with Solaris because the default PATH omits many of the locations where software resides.
Here’s a sample PATH for Solaris: PATH=~/bin:/usr/local/bin:/usr/xpg4/bin:/bin:\
/usr/sfw/bin:/opt/SUNWspro/bin:/usr/bin:\
/opt/csw/bin:/usr/ccs/bin:/usr/X11/bin:\
/usr/dt/bin:/usr/openwin/bin
You should consider adding to the default PATH but the order matters! Many *nix systems support
multiple versions of commands including platform (i.e. hardware) specific
versions. Also (for old Solaris) POSIX versions are in one place (/usr/xpg[46]/bin), Gnu in another (/usr/sfw/bin), community software
in another (/usr/opt/csw/bin), and so on. See filesystem(5) for a list.
No one setting of PATH will satisfy
all users’ needs! One way to deal with
this is to have ~/bin (and/or /usr/local/bin or /opt/bin) first on the PATH, and to put symlinks in
there to the preferred versions of commands that wouldn’t otherwise be found on
the normal PATH.
Set the default time zone.
For Linux /etc/localtime
should be a copy (or preferably) a link of a file in /usr/share/zoneinfo/*; see also the man page for zic on Linux. (On some Unixes
you must set the environment variable TZ
for each user; for our time zone the proper setting is “EST5EDT” (or an alias such as “America/New_York”). For Solaris x86 you set the
timezone of the hardware clock in the file /etc/rtc_config.)
Make changes to the default environment.
These must be put into the system-wide login scripts for each shell. Check in /etc/login, /etc/bashrc, /etc/profile,
/etc/profile.d/*, etc.
Some changes to consider include: setting the default umask, un-colorizing ls, adding some standard aliases,
shell functions, and environment variables, and changing the default prompts
(traditional: users get “XXX$”,
root gets “XXX#”), and set the default
language (LANG variable in /etc/sysconfig/i18n is often wrong and
messes up man pages).
Edit /etc/motd and /etc/issue
and /etc/issue.net.
The issue* files contain the
prompts seen before the login prompt, and motd
(“Message Of The Day”) is seen just after a successful login. Motd is often
used for legal notices, for example “Unauthorized use of this system...” (but
can also be used for notices to users such as “Company picnic on Friday!”.)
This type of legal notice goes by different names such as AUP (Acceptable
Use Policy) or UCC (User Code of Conduct).
Legally, it would be best if the issue* file displayed before the login prompt. While your system
attempts this, if using PuTTY the issue* file is displayed after
the login prompt (but before asking for a password). This is because PuTTY
displays its own login prompt before trying to connect to the remote system.
The default issue* files identify the type and version of your
system. This is a security hole and should be changed to a legal notice or a
simple “Welcome to the FooBar system” message, or removed completely. (Note:
On some older versions of Red Hat Linux it is not possible to edit the issue* files directly as they get
recreated from a shell script on every reboot. This should be fixed too.)
With these files you can also perform
various cursor movements, set colors and text attributes (underline,
reverse-video, ...) by embedding escape sequences. The Linux (and most
versions of Unix) console drivers support a standard for this (ECMA-48). Some
of these codes are also supported by xterm
tools such as PuTTY. See the man page for console_codes
for details.
The issue
file (but not necessarily issue.net)
also support some backslash escapes that get substituted for system
information; see the various *getty
man pages (for Linux, see mingetty)
for a list of these.
Configure email aliases, especially
for root which should go to a human, the SA. Many systems do not
come configured with standard aliases, such as hostmaster,
postmaster, webmaster, abuse, etc. Some of these are required by various
standards. You need to ensure all aliases get resolved to an actual human.
Edit /etc/fstab
and make sure it has entries for all your partitions including Windows
partitions (if the computer is dual-booted), NFS mounts, and removable media
drives. (Note: A Modern GUI system uses HAL to auto-mount removable media
(under /media or /run/media), but only if no entry
exists in fstab!)
After installing the system and the
updates and additional software, build or rebuild indexes with mandb (formerly called makewhatis) and [s]locate
-u. slocate is the secure version of locate that (like find)
only shows stuff the user has permission to see. Use the -e option to exclude directories you
don’t want indexed (such as Windows partitions or the mount points for
removable media). Verify these will run automatically from cron. See crontab files in /etc/cron*.
Setup security: Set a system-wide
default umask. Create
any needed groups (/etc/group).
Other security tasks (and configuration files) you should consider changing
include configuring: fstab mount
options (nodev, nosuid, ...), PAM (/etc/pam.d/*, /etc/security/*), TCP Wrappers (/etc/hosts.{allow,deny}),
configure printer access (/etc/hosts.lpd,
/etc/lpd.perms, or /etc/cups/cupsd.conf), configure
and verify firewall (iptables
on modern Linux), and check default permissions of standard directories
and any added user accounts.
Configure SELinux (or Solaris
zones). (For now, edit /etc/selinux/config
and change “SELINUX=enforcing”
to “SELINUX=permissive”.)
Set the root (and other admin)
passwords. Any passwords you create or change must be recorded. However,
the system journal is not the place for that! (It is not a secure
document.) The common solution is to put passwords in a sealed envelope. Only
the officers of the company can open this envelope, which is usually kept in a
safe deposit box at a local bank.
Adjust user account defaults (/etc/login.defs on Linux or /etc/default/login on Solaris). Adjust
the default values for grace period, expiration date, etc.). Add/remove/edit
the files in /etc/skel. (*BSD:
see mtree(8).)
Setup ssh (/etc/ssh/sshd_config,
...) and disable telnetd and ftpd.
Turn off unused services. The
files /etc/inetd.conf (and /etc/xinetd.d/*) control which daemons
to run such as ftp, telnet, ssh,
databases (such as Oracle, MySQL, Postgres), etc. Turn off any you don’t need
and configure the rest individually (web, mail, ssh, ...) Use TCP Wrapper (tcpd) for added security. Note modern
Linux systems don’t use xinetd anymore; you turn these off from systemd.
Verify and set up /dev entries for your hardware.
The installer should have auto-detected your hardware but it may not find all
PCI devices (such as PCI modems), or ISA devices. You may have to configure udev (via udevadm) or some similar sub-system, instead of directly
editing special files in /dev which
can be done like so:
cd
/dev; ls -l ttyS*; man mknod; mknod
ttyS4 c Majr minr
ln -s /dev/ttyS4 modem
Hardware may need configuration
and usually there are tools to do this. Look for tools such as sndconfig, netconfig, modemconfig,
etc. (In RH see {system,redhat}-<tab><tab>
for lots of such tools. Demo.)
Configure mtools to map
drive letters for your disk, flash, ... drives.
Create additional user accounts
as needed.
Install and configure extra software:
Sun Java, Adobe Flash plug-in (get.adobe.com/flashplayer),
Audio/Video codecs (www.xiph.org), etc.
This often means adding additional software repositories such as rpmfusion. You may need to install various
packages to perform some tasks. For example, install redhat-lsb in order to use various LSB commands. Fedora
20 doesn’t come with any MTA installed, so if you want any email access,
you need to install Postfix or some other MTA. Note, any software not
installed by default that you want, can be installed at any time.
Configure servers: web, mail,
etc.
Create and initialize any required
databases.
Configure logging (/etc/*syslogd.conf). Note, Fedora may
not install syslog (or rsyslog) by default; see journald and journalctl.
Copy the install log (often
found in /tmp or /root).
Backup working configuration
(all of /etc at least).
Setup and configure additional
security measures such as log file monitoring (logwatch) and intrusion detection systems (tripwire). (You should try to protect
all directories with IDS except for /home,
/var, and all tmp directories.)
Configure crontab and anacron
(or periodic). See all the crontab files in /etc/*cron*. Cron jobs take care of rotating logs,
installing updates (if applicable), or anything else system or application
specific, that requires periodic maintenance. Automate as much as possible.
(Note many of these tasks are now done via systemd timer units.)
Add some monitoring solution (Nagios /
Zabbix / you name it). You don’t want your server to get stuck just because one
of disk partitions got full.
Other tasks.
Documentation
Create checklists for complex tasks,
stuff you don’t like to do (so you can delegate or take a vacation or get
promoted). Examples: new hire, termination, new server install, ...
In the past, such documentation was
pure text, or possibly created with nroff (the formatting used for man pages).
Today, it is more common to use Markdown formatting in
blogs and forum posts, wikitext,
and HTML. Sysadmins should have some familiarity with these formats.
Maintain a wiki.
(Or a CMS (Content Management System) for an IT portal.)
There ought to be a place where
everyone involved can find out the following at least:
·
What business function is the server associated with?
·
What group is responsible for maintaining the operating system?
·
What is the acceptable use policy for this server?
·
Are there other licensed products on the server and what is the
licensing agreement information?
·
What is the support information (includes backup schedules, time
to restore, and the procedures to request services)?
·
What is the hardware support contract number?
·
What are the software support contract numbers?
·
When do the support contracts expire?
·
Are there any packages that have been compiled on the server and
if so, document the procedure used to compile them (source, version, make
flags, etc.)?
·
Is the machine physical or virtual? If it is virtual, what is the
visualization technology and who is responsible for maintaining the host
server? (It is handy to also list the VM machine name, which is often random
and different from the host name. Once at HCC, one of the VMs was lost since
the users only knew the host's name, not the VM name. In the end, we shutdown
one VM at a time until the right one was affected. This caused a lot of
disruption as you can imagine.)
·
Is there any custom software on the server and if so, who wrote
it and or supports it?
·
If it runs any service that uses public-keys and/or certificates,
where are the keys stored, when do they expire, where is the password for the
private keys written down (and who has access), and who is responsible for all
that?
·
Are there any "extra" steps that need to be completed
before / after a reboot?
·
What non-standard ports are open and why?
·
When and how are backups done?
·
What IP (network parameters) information is associated with the
machine?
·
What standards, laws, or regulations apply to the host, when was
the last compliance audit done, when is the next due, and who does them?
·
If the machine is physical, what is the exact location of the
server (rack and shelf numbers)?
Basically, if your predecessor was
suddenly unavailable, what information would you need to immediately take over
support of the server seamlessly? That’s what should be documented.
Summary
Before placing a server (physical or
virtual) into production:
1. Configure
2. Harden, secure,
and patch
3. Document
everything
4. Test the server
5. Implement a
backup process (and test it)
6. Implement
monitoring (and test it)
System
Deployment and Initial Testing
Once the system is basically setup, you
should test it before placing it into production. This is especially important
for new hardware (which will sometimes fail at once; if it doesn’t, it usually
means the hardware is good). Virtual hosts need testing too, but not as much.
In addition to exercising the hardware,
you need to make sure your new host is secure enough for the environment it is
going to be in, and that is has enough resources (memory, could, disk,
bandwidth) to make sure you can fulfill the SLA (Service Level Agreement).
Before anything goes into production it
needs to go through testing, QA (quality assurance), and UAT (user acceptance
testing). The QA and UAT are done by others, but sys admins should to initial
testing. Some items you could test (there are lots!) include:
·
Check the firewall rules: Make sure the ports that are to be
secured and locked down, are. While the ports needed to be open vary, a
SysAdmin should know the basic ones: http (80), FTP (20/21), SSH (22), Telnet
(23), SMTP (25), WhoIs (43), DNS (53), DHCP (68), and others. In addition,
there are ports that need to be “locked down” or at the very least heavily
monitored such as 1243, 1433, 2049, 3306, 5800, 5900, 8080, and many others,
including ports for common Microsoft Windows services, file-sharing apps, and
known malware ports.
·
Check the OS: Make sure there are no error messages on initial
startup.
·
Then give it the 10x10 test: start it up, then shut it down
immediately. Let it go through the entire cycle ten times in a row. Verify
there were no problems: does it ever hang? Are there any weird messages upon
logout / startup?
·
Check the physical server and environment: Make sure the
interior of the box is immaculate (no dust; if any is seen, air-blow the box
until it is clean.
·
Check the power supply: Make sure it’s strong enough (many
computers are sold under-powered). Make sure there’s no noises coming from the
fan, check the logs for anything that looks funny. Over-exert the server for
at least 20 minutes by running EVERYTHING installed on it and look to see if it
falters even once.
·
Checking the virus definition files, spam filter rules, denylists,
etc. are up-to-date.
·
Check that SE Linux policies are correct and that it is set to
enforce.
·
Make sure SSH is secured and enabled (or disabled if your company
calls for it!), and all remote tool work flawlessly. (There should be no
glitches or hiccups when you try to access anything on the network, or from the
network to the server.)
·
Make sure there are no problems with permissions on files,
folders, or network shares.
·
Check external devices and services that interact with this
server: switches, routers, monitors, external firewalls, load balancers,
printers, and other servers (especially single sign-on authentication systems)
may all be affected and need updating.
·
Stress-testing: Make sure the system can handle the expected load
(and more). (There are network tools for this, called “load generators”.
Some system admins like to really
torture test a server for about a week before giving it a “Seal of Approval”.
I believe that is rarely warranted, especially when you are installing the
100th identical web server. But a week of testing is not unreasonable for the
initial machine whose configuration you will duplicate 99 times, and keep in
use for many years. Still, it is also common to use an “engineer’s test”: if
it doesn’t crash on first boot, it is fine.
Once tested, you need to implement
monitoring and backup for the new server. The level of monitoring depends
on the agreed upon service level agreement, or “SLA”. (Sometimes
you talk about service level objective, or SLO,
instead.) You can set up monitoring and alarms accordingly, and
of course backups. Only then is it ready for use.
System
Install/Upgrade Procedures
In general backup before installing new
OS on an existing server.
Plan ahead, reserve time, notify
affected users, and have a back-out plan.
Know the hardware of your system:
Use Windows system report (plus display info), BIOS info, invoice, look, use
part# and Google, or service Tag# or Serial# and Internet (Demo
Tag#7YXGK11 and http://PremierSupport.dell.com) to determine, or use inventory
program (say special boot media). Note many different brand names on same
hardware (chip set), good idea to know both name and chip set used on video,
audio, etc.
At the least know HD size, total RAM,
total video RAM. Commands and files: dmesg,
lsdev, /proc. (BSD: dmesg.boot.) Solaris: prtconf, sysdef, prtdiag,
or (non-standard) Explorer.
HP-UX: lanscan, ...
One of the first tasks done at boot time is to create a
kernel ring buffer. This RAM is used to write various kernel (and some
userland) messages; when full, it starts overwriting the older entries. All
the hardware detected and drivers loaded during boot up are recorded here.
Use dmesg to read this buffer.
It is common (and invaluable) to run dmesg |
grep -i something, to determine, for
example, what NICs you have (“grep -i
eth”, what disks and partitions are found (“grep -i 'sd[a-e]'”), and so on.
As the data may be security-sensitive, you can prevent
ordinary users from running dmesg by setting /proc/sys/kernel/dmesg_restrict to a 1. You can see the default size
of the buffer with “grep CONFIG_LOG_BUF_SHIFT /boot/config-$(uname
-r)”. (The number is the exponent of 2n;
the current value on Linux of 18 means 262144B, or 256KiB.) You can change it
to any power-of-two at boot time using the kernel (GRUB) parameter of “log_buf_len=n[KMG]”.
dmesg has some useful options (that depend on the type of
*nix). See the man page for a list.
Another
very useful utility (if available on your system) is dmidecode, which includes all sorts of useful information
about your system. (E.g., installed memory and available memory slots with “dmidecode -t 16,17 |head -n
30”; compare that with the MemTotal line from /proc/meminfo. Try “dmidecode -t processor”
and compare to /proc/cpuinfo.
Try “dmidecode -t system”
to see make, model, and serial number of your host.) The DMI standard is
maintained by the Distributed Management
Task Force, which makes standards for IT management (including the desktop management interface).
While DMI has been superseded by newer standards, it remains quite useful. See
also the biosdecode command.
You
must decide on partitioning. Or a more complex SANs/NAS storage
infrastructure, if warranted.
You
should create at least one additional user account (other than root).
You
need to decide if the hardware clock will use local time or UTC. If dual-boot
system your choice should be what the other OS must use. Linux doesn’t care
but if you have a choice prefer UTC for reasons to be discussed in
another course.
Installing from live media (e.g., live CD or USB) has some
limitations and differences. A live CD rarely can be used for a network boot,
and usually installs different software than traditional install media. If you
have a bootable ISO (live distro) file, you can make a bootable USB flash disk:
dd conv=fdatasync if=/path/to/iso
\
of=/dev/name-from-lsblk-for-USB-stick
Questions? Demo Install of Linux.
Fedora text mode install has fewer options than a GUI mode install. If your video hardware doesn’t work without special
drivers, you can still do a GUI install by adding the “xdriver=vesa” kernel option at the boot prompt. You can also perform a
graphical installation over a VNC connection.
Sometimes you want to use the install
media to repair a non-booting system, or use non-standard boot options not
shown on the GUI boot menu. Depending on the boot loaded used, you can always
get to a boot (command line) prompt. With GRUB, hit the ESCape key.
How to shutdown:
After successfully installing and booting Linux you will (eventually) need to
shut it down. From the GUI: when you logout you will see a “shutdown” choice or a “System” menu (depends on the GUI
used). From the cmd line: enter “halt”
or “reboot”. Remember to remove
all CDs and floppies.
Upgrading
Instead of Installing
If a previous version of the same OS is
already installed, one option is to update the system rather than
replace it. This is called live upgrade. Live upgrade
requires two (same sized) root partitions, only one of which is in use at any
time. However, if you have a mirrored system, so you can break off one
side (disk) and use LU on that. If you don’t have mirrored disks don’t forget
that you need space for alt-root and alt-var (unless /var is part of root, recommended).
Linux doesn’t currently support live upgrade (work in
progress as of 2016), so if the kernel is updated (or certain other parts, such
as the glibc DLL, SE Linux policy, or modules on a sealed kernel) a
reboot is needed. Upgrading DLLs can cause running processes to become
unstable. One possibility is to use virtualization to clone a system, update
the clone off-line, and reboot the clone. You can migrate clients via a load
balancer to the new VM, and take the old one off-line when no sessions remain.
This way you have zero down time!
(Live upgrade is not the same as updating your system from
(say) Fedora 22 to Fedora 23. There is a yum/dnf plugin for that.)
To perform a live upgrade, first copy
the current OS image to the spare boot partition, and then apply the update on
top of that. In the process you merge in your system’s current configuration.
While doing this, the system carries on running normally.
At some convenient moment, you just
reboot using the new boot partition, and you then have the new release
running. The only downtime was the time taken to reboot. (Remember to update
the boot loader!)
If you decide you don’t like something
about the upgraded system just boot the original, which is untouched by the upgrade
process.
The final step is to re-establish the
broken mirror, taking care to over-write the old image with the new one.
The next time a new release comes out
you can do live upgrade again but in the opposite direction.
You can have more than two live upgrade
environments if you like (just allocate the appropriate number of spare
partitions). You don’t actually need to use them for upgrades either. You can
setup an alternate kernel to experiment with, and still have the option to be
able to abandon the effort and fall back to the original.
Solaris pre-11 can also do upgrades in
place without using live upgrade, so you don’t have to allow for live
upgrade, but I strongly suggest you do. An offline (non-live) upgrade
requires you to take the system down for the duration of the upgrade, and you
don’t have the easy option of reverting back with just a reboot if there’s
something you don’t like about the new system or if the upgrade goes wrong for
some reason. (With ZFS you can upgrade a snapshot.)
Most Linux systems support offline
updates. Note however that all modern OSes allow for patches and
individual package and driver updates, and that the whole kernel can be
installed as a package. Thus you can install a new kernel while the system is
running the old one, and switch just by rebooting. Some systems today support live
patching of the kernel, so no reboot is needed.
Patching and updating packages and
system software (and hardware) requires change management.
To make installation boot floppies for legacy systems that
can’t boot CDs or Flash:
Mount the CD on a Windows machine, say as drive D:. Then
enter:
D:\dosutils> rawrite
src name: ..\images\boot.img
target: a:
Under Linux use uname -r (or -v); mkbootdisk -v version
or under any system: dd -if=boot.img of=/dev/fd0
bs=1440k
If you have SCSI disks (and you do) you may need a bit more
work to make a proper boot disk (see initrd).
Other
Install and Upgrade Options, and KickStart
The above suffices for a SOHO scenarios
but at some point, you will have dozens of servers to manage and to upgrade.
You will not want to run around with install CDs and repeat all the steps on
each server. (Qu: Why not? Ans: Not efficient, not cost-effective, not fun,
and error prone in that it becomes easy to mess one up.)
Red Hat Kickstart saves
all configuration choices in a file, used to automate the install of other
(many) machines. To install you insert the boot CD, point it at this file (on
the network or on the CD), and go away while the install completes on its own.
Debian’s FAI (fully automatic installer) and
Solaris’s JumpStart (renamed “automatic install” in Solaris 11) work
the same way. An advantage of this approach is that all machines that have
the same purpose get configured the same way.
The file used to automate system installation varies with
the distro. Use AutoYAST profile for SUSE-based systems and a preseed
file for the Debian-based systems.
An installation server can be
setup with the configuration (e.g., Kickstart) file(s) and all the correct
software packages to be installed. Then you don’t need to put the packages on
any CD, just maintain the installation server. This server should be reachable
from the hosts in your enterprise, but not from the Internet or any insecure
part of your network.
To create the Kickstart file(s), do a
manual install on a lab machine. Anaconda (the Red Hat installer program) will
save all your choices in a kickstart file, which is just a plain text file you can
edit to “tweak” the result. Then test the new system. When you are happy, you
then can use that kickstart file.
PXE (Pre-boot
eXecution Environment)
At some point, you will need to
install/upgrade several hosts at once, or have hundreds of hosts to update (e.g.,
HCC’s classrooms, a web server farm). You can copy the install CDs and get
volunteers to work on each host, or consider PXE.
PXE is an open standard, developed
by Intel. It is used on modern (not just Intel) systems to boot completely
from a network. PXE (or a non-standard equivalent) should be enabled from the
system firmware, as are other useful remote administrative settings such as
remote power-on options. With these features enabled, you can upgrade many
servers at the same time from the comfort of your office. (LOM also provides
this functionality.)
You use your remote management console
(KVM or equivalent) to power up the host, have its NIC configured with DHCP,
which will also cause the server to download (to RAM) an installer image known
as pxelinux, a port of syslinux. UEFI hosts need a different
installer image, typically elilo.efi
or grub.efi. (This is very
similar to what BOOTP does for diskless workstations.) This software then uses
network install/kickstart to complete the process.
To use PXE, you configure a DHCP
server to recognize the MAC addresses and assign appropriate IPs, DNS, etc.
You also setup a TFTP server, which is one of the few forms of networking PXE
firmware understands. The DHCP server will tell a booting host to fetch and
then run pxelinux (for BIOS
hosts; UEFI hosts use a different file), downloaded from the TFTP server.
Pxelinux in turn will find the appropriate PXE config file (based on the host’s
UUID, MAC address, IP address, or a default). This config file tells pxelinux
what initrd or kernel file to
fetch from the TFTP server. This then runs as normal. If this initrd image was configured to use
kickstart, then the install process begins now (you have to tell the kernel a
URL of the kickstart file). The install will need the kickstart file as well
as software packages to install, using HTTP (so you need to set up a web
server, DHCP server, and a TFTP server). With LOM you can remotely power on a
host (or, without LOM, manually power on a host), which will then use PXE
booting, and off it goes!
Live USB
In olden days, you would normally make
an emergency boot floppy disk, with the correct kernel and root device. This
would be used when the boot loader failed, or when you needed to recover the
root password. In addition to use for recovery, it is convenient to carry a
live distro in your pocket!
Today you can use a live CD
or DVD. The installer CD or DVD is usually also a live (bootable) system. But
you can also use a +1GB Flash disk as a boot device on modern computers
(requires BIOS support). Note, even though a USB flash disk may be read/write,
live distros are usually read-only. Many live distros are designed to be
portable so they can boot from any machine. Not all will do so however. For
learning purposes, you could install a regular distro such as Fedora on any
block device; Anaconda treats a USB flash stick as a disk. For portability and
a read-write capability, the best solution I know currently is to make a live
distro from one with good portability, and that contains VirtualBox. Format
the flash drive as two filesystems, one for the live distro as read-only, and
the other as read-write. Use the read-write one to store VirtualBox’s files.
There are a number of tools for various
OSes to make Live Flash disks. For Fedora, you can use (from either Windows or
Fedora) the liveusb-creator
tool, available at http://fedorahosted.org/liveusb-creator.
You can also install GRUB on a USB
drive, to boot a live or other bootable volume:
Assume that you want to call your new
USB volume “MyBooter” and that your flash device resides at /dev/sdb. First, you need to create
the filesystem in partition 1:
#
mkfs -t vfat -n MyBooter /dev/sdb1
Next, you need to mount the filesystem
and install GRUB:
#
mount /dev/sdb1 /mnt/flash
# grub2-install --no-floppy \
--root-directory=/mnt /dev/sdb
Now you can add .cfg files to grub.d/
in order to add/edit/delete menu items to the boot menu or customize the Grub boot
menu.
If you want to make a live image, find
one and extract it to your hard disk. If you have more than one, you may find
they all use /boot to hold the
files. You can either merge all of those distros, or simply rename each one to
something like “boot-Fedora16”.
Aside from the boot folder, there typically is another folder in these ISOs
that contains the boot image for the OS. Copy this folder to the USB device as
well. You then need to add an entry in the GRUB configuration file so that
this distribution will show up in the boot menu. This file is menu.lst for GRUB 1 (“Legacy”), or grub.cfg for GRUB2. The syntax is
different for both. Below I show the GRUB2 configuration.
Each GRUB menu entry will provide a
user-friendly title, the root filesystem location, the pathname (relative to /boot) of the kernel image and any
options to be passed to the kernel, and an initial ramdisk (optional). For
example:
menuentry
"MyBooter Fedora 16 Live" { # title
set root=(hd0,1) #location of root filesystem
linux /boot-Fedora16/vmlinuz0 #the kernel image
initrd /boot-Fedora16/initrd0.img #the boot image
}
Some distributions take some tweaking
to get them to load properly. For instance, some live CDs need to be booted
into 16-bit mode; in that case, you would use linux16
and initrd16 instead.
Here’s a kernel line that works for a
live USB Fedora (long lines split for readability; continued lines start with “➥”):
linux
/boot-Fedora/isolinux/vmlinuz0
➥live_locale=en_US.UTF-8
➥live_keytable=us live_dir=/fedora1 root=UUID=A716-9810
➥rootfstype=auto ro liveimg quiet rhgb
➥rd_NO_LUKS rd_NO_MD noiswmd
Here’s another entry:
menuentry
"Ubuntu Live 9.10 32bit" {
loopback loop /boot/iso/ubuntu-9.10-desktop-i386.iso
linux (loop)/casper/vmlinuz boot=casper
iso-scan/filename=/boot/iso/ubuntu-9.10-desktop-i386.iso
➥noeject noprompt-- initrd
(loop)/casper/initrd.lz
}
Reset a Lost
Root Password
Forgetting the root password that was
set during the install is a common problem. There are a number of ways to
reset the password, depending on your system. For Fedora (and other Linux
systems using “systemd”) you can follow these steps:
1. Reboot and add “rd.break enforcing=0” to the GRUB’s linux or linux16 line. After control-X, the system will boot up
to a root shell prompt.
2. Next, remount
the real root volume as read-write using the command “mount -o remount,rw /sysroot”. Then make that your root with the command “chroot /sysroot”.
3. At this point,
just run the passwd command and
enter a new root password. (And this time, write it down!)
4. Finally, restore
the volume to read-only, in order to complete the boot process: run “mount -o
remount,ro /”. Use exit to leave the chroot environment, and exit again to continue the boot
process.
5. When the system
boots up, you have one more task: become root and run the command “restorecon /etc/shadow”.
6. Now you are all
done. Note however SE Linux is off (because of the “enforcing=0” you used). If you want it on, run as root “setenforce 1”. (Sometimes, a reboot works better.)
Lecture 4 — Storage Volumes, Partitions, and Slices
Storage Volumes A
disk contains a number of consecutive sectors that appears as a single storage
volume. Using partitioning, a single disk can present the OS with
multiple volumes, commonly called partitions or slices. Each appears as a
separate disk volume (drive) to the users. Using RAID or other techniques,
multiple disks and partitions can appear as a single volume.
A storage volume allocates space to
files in units called logical disk blocks, or just disk blocks.
These are some multiple of the sector size. For Linux and some flavors of
Unix, 1 KiB block sizes were common, with a maximum of 4 KiB. With modern
filesystems such as ext4, the default is usually 4 KiB (same size as a virtual
memory page), and a maximum of 1 MiB.
UFS (Unix file system) and some other FSes support
allocations of fractions of a disk block called fragments. Using
fragments can save space when you have many small files, but takes longer to
access (more work is needed).
The type of a storage volume is called
a filesystem (and in fact storage volumes are commonly just called
filesystems). Examples include FAT, ext4, and UFS. The disk block(s) at the
start of storage volumes hold filesystem info such as the size, time since last
check, mount count, volume label, and other data. It also holds tunable
(changeable) parameters. This is known as the superblock. This
vital data is copied to memory when a disk is mounted.
Modern Unix and Linux filesystems divide
a storage volume into multiple cylinder groups (or block groups
or extents), typically about 16 cylinders per group. The part of
the kernel that manages storage (confusingly called the file system!) makes
every attempt to keep all the blocks of a single file within one group; keeping
blocks close to each other makes disk access more efficient (reduces head
movement). Unless the disk is very full (>90%) no extra fragmentation
occurs. (Various new features in ext4 can cause some fragmentation, so that
filesystem includes the tool e4defrag.
This tool can “defrag” a file, directory, or whole filesystem, even while the
filesystem is mounted.)
The system also keeps a copy of the
superblock at the start of every group.
Fun facts: Unix filesystems reserve about 5% of the
available space for root only use.
The number of inodes is fixed when some types of filesystem
are created; more modern filesystem types allow the inode table to start small
and grow as needed.
The superblock, cached inodes, and other data are written
to memory and only flushed to disk every so often (e.g. 30 seconds, or when the
disk is otherwise idle).
The umount command runs sync to flush this data, but may not do it right away. You can
manually run sync when shutting down a system manually.
If you foolishly use fsck on a mounted filesystem, the
sync will re-corrupt the fixed disk copy from the memory copy!
(Since a mounted filesystem will likely cache some data in memory, the on-disk
version will always appear to be corrupted to fsck.)
Note that disks may have (large) internal write caches, so sync doesn’t guarantee the data is flushed to disk.
Partitions and
Slices There are different schemes for partitioning a disk. For
workstations DOS partitions (a “DOS” or “MBR” disk) are common (including for
Linux). Sadly there is no formal standard for “DOS” partitions, the most
common disk type! (A typical MS tactic.) Other OSes (Solaris, *BSD) use
their own partitioning scheme, inside one DOS (primary) partition on IA. The
concepts are the same for all schemes.
Older Sparc servers use “VTOC” and new ones “EFI”
partitioning schemes. Macintosh uses “APM” (Apple Partition Map) for
PowerPC Macs and a GPT for x86 Macs. The Sparc schemes as well as the more
common (and vendor-neutral) GPT scheme are discussed below.
The scheme used matters since the BIOS (or equivalent) as
well as the boot loader must be able to determine the type and location of
partitions on a disk. This is why you can’t dual-boot Windows XP on Mac
hardware: the Windows XP (and older) loader assumes DOS partitions and doesn’t
understand GPT partitions.
The MBR (Master Boot Record)
is the first sector (512 or 4096 bytes) on a DOS disk. It contains 446
bytes of boot code and a 64-byte partition table or map.
The last 2 bytes mark the sector as a DOS MBR (0xAA55). Each entry in the MBR partition table
says where the partition starts and ends (in CHS; also the LBA for the first
sector, and the number of sectors), the type, and other data.
You can restore the MBR boot code without wiping out
partition information using the DOS command FDISK.EXE/MBR, only
if you have an older system; newer systems include diskpart.exe instead.) A better way (if you think the MBR may be infected
with a virus) is to boot Windows into the Recovery Console, and run bootrec.exe /fixmbr. Otherwise (when using Linux for example), you can
restore the previous MBR if you have one saved in a file.
Most software expects all partitions to
start on a cylinder (or at least a track) boundary. (Note that on modern
systems, such boundaries are fictional as the drives lie about their geometry.)
Those that don’t (older Solaris) can confuse other OSes in a dual-boot system.
This does mean that often there is unused space at the beginning (cylinder/track
0 only uses the first sector for the MBR, and maybe another for a partition
table) or end of a partition. Some boot loaders use this space, as do some
viruses.
Each partition contains one or more boot
blocks, which contain information about that partition, an OS specific loader
(may be put in MBR too), and other info (e.g., the location of the OS program
a.k.a. OS image).
The number of DOS partitions per disk
was originally four. Later special extended types were invented. The
current scheme allows you to mark one of the four primary partitions
as extended. This extended partition includes all
remaining sectors not used by the first three partitions (you don’t have to
have all three used, or any). The first sector of this extended partition
contains an MBR that contains two entries: one for the logical partition
and the second for an extended partition for the rest of the disk. Inside that
you’ll find another MBR pointing to another logical partition and yet another
extended partition.
Each of the logical partitions is
preceded by an MBR, forming a linked list of logical partitions. In theory
there is no limit to this, but in practice the BIOS and OS will have limits on
how many partitions total will be seen. These limits may differ for IDE and
SCSI (for no good reason; just a limit in the device drivers) but both are
around 15-32 partitions per disk. Linux allows 15 DOS partitions per disk (now
the same for SCSI as the same device driver is used for both in Linux; 63 for
IDE if the old driver is used).
Unix servers don’t use
the DOS disk scheme, but use a related concept known as disk slices.
Some OSes confusingly call slices “partitions”. Annoyingly, many
Unix documents and man pages mix up the terms partition and slice. You have
been warned!
On x86 (IA32 and maybe
IA64), in order to co-exists with Windows and Linux these Unix systems use one
primary DOS partition in which they use their own partitioning scheme. Logical
DOS partitions are invisible to them. Unix may be able to use other DOS
primary partitions if they have FAT FSes in them. The Unix partitioning scheme
doesn’t have an MBR but a similar data structure called the “disk label”,
which contains the partition table/map.
The term disk label can be confusing. Each disk has
a disk label, which may be called the MBR, VTOC, or GPT. However, each storage
volume can also have a label (and a type number, sometimes also called a label),
stored in the partition table. This is technically the volume label but
is often called the disk label. A volume label is 8 bytes in length and often
contains the mount-point pathname. (An EFI/GPT volume label is 72 bytes,
holding 35 Unicode characters (in USC-2 encoding; no normalization is specified)
and a NUL value at the end.) Finally, most filesystems allow a label, stored
in the superblock, but it is much shorter and the encoding is unspecified.
The MBR “OS type” code indicates what is stored in that
partition. Most Linux systems use the same codes as Windows does, resulting in
Windows (on a dual-boot system) thinking the Linux partitions are unformatted
Windows partitions. You can manually change the type number in the MBR using many
partitioning tools. Use 0x82 for Linux swap and 0x83 for other Linux volumes. You can find lists on Wikipedia and www.win.tue.nl.
Most other lists I’ve found are out of date and don’t include the new types
added to support EFI, such as 0xEE (for a fake, protective MBR)
and 0xEF (for the ESP, discussed later).
The fdisk utility (both Linux and
Solaris) is used to label a DOS disk with an MBR. (Use gdisk for EFI/GPT disks.) One of these primary partitions is
then divided into slices by labeling that partition using the format command to write the VTOC or EFI disk label to it. The
Solaris format command used to define the slices has a sub-command to
label the disk, but you must remember to use it!
The partition map on a Unix disk is
called a volume table of contents (VTOC). Unlike partitions,
slices can overlap. For example, slice 1 might contain disk cylinders 0-19000,
slice 2 cylinders 200-19000, slice 3 cylinders 100-1000, etc. It is up to
the SA to make sure that filesystems are sized not to overlap when placed in
different slices. Planning filesystem sizes and types is the same for both
schemes.
Newer Unix and Linux systems use EFI
disk labels instead of VTOC. This supports larger volumes than VTOC or DOS
(over 2TB), doesn’t have the danger of overlapping volumes as with VTOC,
doesn’t use disk geometry (uses LBA), doesn’t reserve slice 2 for the whole
disk, and has other features. However, it can’t be used for IDE disks, and
isn’t supported by some Older GUI disk tools.
Fedora uses GRUB2 and EFI disk labels. Older BIOSes can’t
handle those labels (which is where partition information is kept). The
solution is to create a tiny 1 MiB MSDOS partition which holds GRUB2, and GRUB
in turn can deal with the EFI disk labels. This is known as a protective
MBR partition; see below. This is only a problem during the
transition from older DOS BIOS to modern EFI/GPT BIOS. See BIOS boot
partition, also below.
Partitions (and slices) usually
hold filesystems, which are data structures to organize files.
(Putting a filesystem into a partition is referred as formatting the
partition (or disk). You can use mkfs
and other programs (newfs)
to do this formatting on Linux and Unix). The kind of FS used is known as the partition
type: ext[234], swap (Not a FS), ... Since partitions/slices usually hold
filesystems these two terms are often used interchangeably.)
Each filesystem in a partition can
be labeled with a type, a name (or volume label) and a unique ID (UUID).
You can view these using the blkid
and other commands, and change them with fdisk/gdisk or tune2fs. (You might need to change this after making a
copy of some FS and need to mount the original and the copy.) Note that
many filesystem utilities use labels or UUIDs to identify partitions rather
than the device pathname, so it is important to get this right when setting up
partitions!
Windows will ignore partitions with an
unknown type, but other OSes don’t care about the type. This fact can be used
to “hide” some partitions from Windows on a dual-boot system.
Unix systems can
detect primary partitions (Solaris calls these FDISK partitions) on a DOS
partitioned disk. Each DOS disk is expected to contain a single Solaris FDISK
partition as physical partition 1, usually for the entire disk. Solaris then
writes a VTOC in the start of that, and uses slices. If any of the other
partitions contain FAT (Solaris docs call this “DOS” but the type used is “pcfs”), NTFS, ext2, ext3, or ext4, they
can be mounted and used (only pcfs supports r/w), otherwise they are ignored.
“Up until Solaris 7 you
could newfs a non-Solaris FDISK partition and have a UFS filesystem on
it. The command line parsing of mkfs_ufs broke in Solaris 8, and
hasn’t worked since — you can’t feed the necessary parameters in even though
the man page says you should be able to do so.”
— Andrew Gabriel [Solaris Guru], comp.unix.solaris post on 11/27/07.
The Solaris partition in
turn can be divided into (up to) 8 slices using the VTOC on Sparc, 16 on x86.
Each has a definite (historical) purpose and some can overlap others—it is up
to the admin to make sure the filesystems in each do not overlap! The
partitions were originally lettered ‘a’
through ‘h’, but modern Solaris
numbers them 0–7. Slice 2 by default is reserved to refer to the whole Solaris
partition (again, usually this is the whole disk).
By convention (and assumed
by some disk management utilities) some of these slices are reserved for
special uses. On a bootable partition/disk the root (“/”) filesystem should be slice ‘0’. Slice ‘1’ is for swap,
and slice ‘2’ refers to the whole partition/disk and can be used for backups.
Slice ‘3’ may be used to hold a bootable OS image for clients with a different
architecture, but today slice 3 often contains a copy of the root filesystem
used for live upgrade when you don’t have mirrored disks. Slice ‘7’ for
/home (/export/home). This leaves slices 4 and 5 available for
your own ideas. And ‘5’ is usually used for /opt.
Slice 7 is usually /export or /export/home. Solaris is intended as a server, so users are expected
to use NFS to auto-mount their “real” home directory on /home when they login on any host. If this host is not the one
containing the actual home directories, an /export/home is
auto-mounted on /home if NFS is used. Only create /home directly if a host is not networked and you don’t want to
use an auto-mounter.
On x86 hardware Solaris
uses 10 slices (0-9) instead. Slice ‘8’ is used in the booting process, and
slice ‘9’ is used to map out bad disk blocks. (So you don’t get any extra
slices.)
This limit on slices is a
hardship for modern systems that use large disks and could use more but smaller
filesystems for added security. To address this Sun has created a “next
generation” filesystem type that also deals with logical volume management. It
is called ZFS (discussed below).
The default Solaris
installer creates small root and swap slices, and all remaining disk space goes
into slice 7 (/export). This
install will fail if you add any optional packages (the GUI, OpenOffice,
etc.) software to your system (most goes into /opt)
or have a lot of RAM!
Solaris versions <11 include
many features that complicate planning your disk map. These include using
multiple FDISK partitions, using logical volume management (Solaris supports
three different LVM systems, with different restrictions), Software RAID, and
ZFS. Other features such as “live upgrade” can also constrain your disk map.
(After carefully researching this on the Internet, reading Solaris
documentation, and after several discussions with Solaris experts, I suggest
hiring a consultant from Sun to set this up for your organization.)
Solaris 11 and/or OpenSolaris address all these issues, as
you can just use ZFS for everything.
You can use an un-named
slice (e.g., slice 4 or 5) to hold a ZFS pool from which you can
allocate many ZFS file systems easily. You can also create a zpool from a non-Solaris FDISK
partition of type “OTHER OS”, at least on x86 systems.
Or, you can use Solaris
Volume Management (SVM) for a slice, and allocate many UFS file systems
from that. SVM should need an additional slice (#7) reserved to hold meta (or
virtual) device data, often called a metaDB replica (size: 32MB is fine). Since
ZFS is still not usable for many purposes, SVM is currently recommended (2008)
unless you have an entire non-boot disk for the zpool. See also VxVM (Veritas
VM), a commercial LVM solution available for Solaris, HP-UX, and others.
There are differences in
Solaris disk use for x86 and for Sparc. For example, while SPARC boot blocks
can be contained within the root slice, the x86 boot stuff (GRUB) is
bigger so a boot slice ‘8’ is normally created. Although this space is unused
on non-boot drives it is almost always left in place.) SPARC VTOC has 8
slices, x86 VTOC has 16. format
can’t manipulate the slices above #7 very well but the fmthard command can.
GPT
Partitioning Scheme and EFI
Besides DOS, OpenBoot, and VTOC
(old Unix), another type of partition scheme is designed for use on 64-bit
systems. These systems don’t have BIOS, but instead have UEFI (Extensible
Firmware Interface) that serves a similar purpose. (See UEFI.org for more info; note Intel is a member
and now uses that too.)
Technically, the current
version is UEFI and the first version is EFI, but everyone now uses UEFI, and many
(or at least myself) call either version “EFI”. Soon, all computers will
have EFI instead of BIOS, so an SA needs to know this. (All 64-bit
systems, and all Intel systems use EFI since mid-2011.)
VirtualBox and VMware Player support UEFI for 64-bit OSes.
BIOS was shipped with the
first IBM PCs in 1981, and has many limitations for modern hardware:
·
BIOS expects the first sector of a hard disk (the MBR) to contain
a boot loader. But this is only 512 byte long, and the book loader is only
part of that. This is too small for a useful boot loader! This requires this
loader to find a “second stage” loader elsewhere on the disk, but it must be
simple to find since BIOS doesn’t understand most filesystems.
·
Another problem is that the MBR must be writable, and an error
can cause the system to be unbootable.
·
Viruses also like to hide in the MBR and in the unused space
after it, and file-scanning virus detectors sometimes don’t look there.
·
The small size of the sector numbers used in BIOS is caused by
its 16-bit operating mode; this means limitations on disk size. The old MBR
partition system is limited to 232 sectors, which works out to 2 TiB on disks
with 512-byte sectors.
·
Often, the disk firmware has to “lie” to the BIOS about the disk
configuration (for example, reporting there are 256 “heads” per spindle)
because the read geometry may exceed 216 sectors or cylinders. The
disk’s firmware then must translate requested disk sectors to their real
locations.
·
While less of an issue today (because of cheap virtual machine
software), dual-booting is hard since BIOS isn’t well-designed for that.
UEFI is designed to
eliminate these problems:
·
It does understand GPT (and DOS/MBR) partition tables, and many
filesystem and drive types; in fact, you can plug-in drivers for disks and
filesystems. This means the boot loader doesn’t need to be stored in the MBR,
but instead can be in a file on disk.
·
EFI allows you to select which boot loader to run at boot time,
making dual-boot systems simple to implement: just have multiple boot loaders.
(One of which must be designated as the default.)
·
The partition tables don’t share space with executable firmware,
so can be hardware-prevented from executing any virus placed there.
·
EFI includes a pre-boot execution environment, or runtime,
that runs before any OS is loaded. EFI modules can be run from here;
usually they have the “.efi”
extension. The user interface may include GUI eye-candy, although that can be
disabled. EFI implementations typically provide a simple command-line shell
and a scripting language, enabling you to write boot-time scripts that can
perform various tasks before any OS boots. The UEFI runtime stays in memory
until the system is rebooted. The UEFI runtime offers services including
changing UEFI variables, uploading new firmware, running EFI executables (such
as GRUB.efi), and booting an
operating system.
Along with some new CPU hardware support,
this can be used to validate digital signatures and checksums on bootloaders
and OS kernels, ensuring no rootkits (virus in the kernel) are present.
(Unfortunately, this “feature” can also be used to prevent you from replacing
Windows with Linux.) You can even use various tools, such as text editors and
partitioning utilities, to adjust your system if you run into boot problems.
(Note OpenBoot also supports that.)
·
GPT uses 64-bit pointers, so its limit is 8 ZiB (zebibytes).
·
UEFI variables enable operating systems to deposit
data for the firmware that will still be available after a reboot. Microsoft’s
Windows 8 Hardware Certification Requirements stipulate that at least 64KB of
storage must be available for this purpose, although the UEFI standard doesn’t
currently say that. (In 2/2013, it was discovered that by writing too much
data will “brick” Samsung laptops.) In Linux 3.8, UEFI variable filesystem (efivars)
is able to read and set UEFI variables with sizes larger than 1KB. The efivars
filesystem is usually mounted at /sys/firmware/efi/vars/.
·
UEFI doesn’t care about disk geometry the way older BIOSes did,
it just uses LBA.
UEFI and
GPT Details
64-bit UEFI runs best with
64-bit systems. While it can run 32-bit bootloaders, and boot 32-bit kernels,
many features won’t work correctly if you do. For this reason, EFI disks can’t
be used on a boot disk for Solaris 10, on Intel 32-bit hardware, or to boot
32-bit Windows from Apple hardware. With no mis-match, typically EFI boots can
be done in 20 to 30 seconds.
UEFI uses a partitioning
scheme called the GUID Partition Table (GPT). The GPT
doesn’t limit the number of partitions; however, MS and other OSes (?) have a
limit of 128 GPT partitions per disk. (Windows XP refuses to boot GPT disks
when booted from BIOS, for some reason. It will boot fine using UEFI
firmware.) Unlike DOS/MBR partitions, there are no primary/extended/logical
distinctions.
UEFI/GPT supports very
large disks, too. (You’d think such disks would be called GPT disks, but the
common term is EFI (or UEFI) disk, as opposed to DOS or MBR disk.) Apple
hardware uses UEFI, which is why you can’t install unmodified MacOS X on most older
PCs. Many newer motherboards include UEFI, with a “legacy” BIOS mode.
To support older OSes and bootloaders, many motherboards
with UEFI default to using the legacy BIOS mode. It may not be obvious how to
change that, to take advantage of EFI booting.
It isn’t necessarily bad to boot with legacy BIOS.
VirtualBox seems to prefer it (2017).
Unlike BIOS, the UEFI
firmware won’t fit in 512 bytes. EFI requires its own partition, the EFI
System Partition (ESP). Most OS-specific bootloaders are
installed on the ESP too. Look in /boot/EFI/nameOfOS/*.efi.
Running that file from the UEFI shell should boot that OS.
The UEFI shell is a curious mix of DOS, POSIX, and other
stuff.
The EFI specification
states that the ESP should use the FAT-32 filesystem. (In practice, on Linux any
filesystem type that UEFI supports will work. Windows will require FAT-32, so
you might as well use that.) The size of this partition varies, from one to
several hundred MiB; If you have the space to waste, 200-600 MiB is a reasonable
choice, especially for a learning or multi-boot system.
FAT32 generally means case-insensitive command and file
names. Some file names refer to files in other volumes (typically, /boot is ext4 and the ESP is mounted at /boot/EFI), so some file names are case sensitive. Also, you may
have to use backslashes as the path separator, and limit file names to legal
FAT32 ones.
Technically, names in the FAT32 system may be encoded as
UTF-16, and so are not necessarily case insensitive. However, UEFI only allows
UCS-2 names (the Unicode BMP), which is a subset of UTF-16 allowed characters,
and does not specify any normalization.
Protective
MBR
The protective MBR in the disk’s first sector prevents older,
GPT-unaware software from corrupting the GPT by attempting to write an MBR. It
contains a fake partition of type EFI GPT which spans the entire disk. This
prevents older disk tools from making any modifications to the partitions
managed by the GPT. This protective MBR also allows standard BIOS-based
computers to boot from a GPT disk using a boot loader stored in the protective
MBR. (EFI ignores it.)
BIOS Boot
Partition
If you are creating a custom partition layout on non-EFI x86 or
x64 systems, you may need to create a separate, 1 MiB or larger BIOS boot
partition. It is used by GRUB and possibly other EFI bootloaders. The
reason is that some boot loaders store their code in the unused space after the
MBR; however, GPT disks use that space. This BIOS boot partition reserves
space for the boot loader code, and is only needed in a few cases; many *nix
will create it automatically if needed. (That’s not always true.) If you have
this, you probably don’t need the “protective MBR” partition too.
A BIOS
boot partition has a partition type of 0xEF02, and doesn’t need to be
formatted or assigned a mount point. It can be created using various
partitioning tools such as gdisk
or gparted. When creating a
BIOS boot partition manually, it pays to make it the first partition. Be sure
to set the partition type; with gparted,
just set the bios_grub flag on
the partition. While 1 MiB is fine, today’s disks have space to waste, and
I’ve read that using 128 MiB work better on Apple hardware (unconfirmed).
While DOS disks have a 1-byte number for partitions called
an OS type code, it is usually ignored by OSes. However, the system
firmware may pay attention to this. GPT disks used with EFI don’t have this
field, but instead a 16-byte Partition Type GUID field. This is an
ugly, hard-to-type hex number. For example, a BIOS boot partition has the GUID
of 21686148-6449-6E6F-744E-656564454649 (which is ASCII for “Hah!IdontNeedEFI”).
Most GPT-aware partitioning tools support different ways to
set this. Rod Smith, the author of the gdisk and related utilities,
decided to invent two-byte codes for his tools (similar to the MBR type codes),
which map to the correct GUID. With gdisk, you just need to enter
“EF02” when you manually create the ESP. (That tool provides a list of these
hex codes.)
The ESP is usually mounted
at /boot/efi on Linux systems.
This contains subdirectories for the files for various systems; .../EFI/BOOT holds the default bootloader
(“BOOTX64.EFI”), and you
may find others such as .../EFI/MICROSOFT.
All UEFI program, drivers, and bootloaders have the “.EFI” extension.
In addition, the ESP must have the “boot flag” set
in UEFI. (Note this is not the same as the DOS/MBR boot flag.)
There are a number of Linux
boot loaders available, but not all support GPT/EFI. ELILO is an EFI version
of LILO. GRUB 2 supports both but is more complex to use than GRUB legacy.
Just in case you’re not totally confused yet, the term GUID
is used to define the format of a 16-byte value. (See wikipedia.org
Globally_Unique_Identifier.) So with GPT, each partition has an
identifying number (also known as a UUID in the *nix world) and a partition
type number, both are stored as GUIDs.
Planning
Disk Layouts / Maps
If you plan to use Solaris
“live upgrade”, you must duplicate all slices that contain files added by the
installer/patch manager. If you use mirrored disks there is no problem but on
a single disk you must either keep all system standard paths on the root slice
or duplicate both / (root), /var, and so on. Thus, best advice
is to not sub-partition any standard paths in /var or /usr.
It is okay to create new directories such as /website
and make those separate slices.
The best advice today is
to keep the boot disk small and simple, using a standard layout. (But not
the default layout for Solaris 10, it is known to not work as of 4/2008 for
most disks!) Use other disks (or use a SAN or NAS if possible) for
additional filesystems as needed. Keep in mind the max number of
partitions possible on a disk for a given OS.
If you only have one disk
(possibly because you’re using hardware RAID), the most flexible disk map will
reserve one slice/partition for LVM. Then you can create additional
filesystems later as needed without re-formatting the disk.
Tools for
partitioning include fdisk,
cfdisk (like fdisk but with a curses UI), sfdisk (scriptable fdisk replacement that does more), format, Disk Druid, [qt]parted,
fips.exe (used to split a
FAT partition into two; then delete 2nd partition, and use the freed space for
Linux), and Partition Magic. A shorter list of GPT partitioning tools
is also available, including gdisk,
cgdisk, sgdisk, and gparted.
A live CD/USB for this (works with NFTS but not LVM) is gparted.sourceforge.net.
If the partition table on a disk gets corrupted (and you
don’t have a backup) you can use gpart (not [g]parted) to scan a disk and guess the partition map; this be then
be written to the MBR to recover the disk.
Choosing number
and type of partitions/storage volumes: some for swap and rest for /
(a.k.a. the root disk) would be sufficient for many home users. Reasons
for extra partitions include security, quotas, and backups. Older
motherboards’ BIOS has a 1024 cylinder limit to locate bootable partitions, so
make small (~24-150MB) bootable partition near front of disk: /boot (Linux), /kernel (Solaris), or /stand (BSD). Consider /tmp, /var,
/var/log, /home. (Show on YborStudent: df -h.)
One of the most critical decisions when
installing Unix or Linux is how to best make use of limited disk space.
Even with today’s large hard disks, servers with hundreds of gigabytes of
pictures, video, sound, database, and other data are common. Multi-user
machines may require protection such as read-only partitions, disk quotas,
etc. Sizing storage volumes is not easy and there are few standard
answers. /tmp should be ≥1.5
the amount of virtual memory, if you make one at all (modern systems generally use
a RAM disk for this). /boot
should be about 500 MiB on a modern Linux system.
Sizing swap space is hard; if
you have lots of RAM and never worry about running out, and are
not using hibernation or crash reports, and are not worried about a bug
in (say) a video editor program consuming all memory, then you don’t need any
swap space at all. However, even then having some is a good idea, as the
system can optimize its use of memory for cache buffers (meaning it might be
better to swap in some cases).
Fun fact: In 2011, Apple purchased 12 petabytes of Isilon (a
brand of NAS) storage, reportedly to hold iTunes movie content.
There are many
reasons for partitioning a large hard disk into several smaller partitions.
For a home user with a single small-ish disk (today’s large disks are
tomorrow’s small ones), a single Linux partition (plus swap and maybe one for
Windows for a dual-booted system) can be a reasonable choice. But
partitions provide some safety so I always would create several
partitions. Here are reasons to partition:
·
If the root partition runs out of space, the system
will crash. If some non-root partition runs out of space, the system
will remain up and the SA can login and fix things. Thus the directories
such as /home, /tmp, and /var that users can easily fill
with downloads, email, etc., are prime candidates for extra partitions.
So are any other directories that might grow (ftp uploads, database, ...). Note
the root partition on some systems have a max size; for Fedora 30 its 70 GiB.
·
If the partition containing the log files runs out of space,
the system won’t be able to write any log messages that could help an SA to
determine what went wrong. On the other hand, some rapidly recurring
error can cause log files to grow very large, very quickly filling the
partition containing them. So the directory containing log files, /var/log, is a good choice for
a separate partition.
Note that under systemd init system, volumes other than /
(root) are unmounted before logging is stopped. Thus, you will see an error
message about unmounted /var/log (or /var) whenever you shutdown or reboot.
·
Parts of the file system may need to be mirrored or otherwise
duplicated. Many software tools exist that can do this but they work
on whole partitions (such as “ghost”). (Yes, there are other tools
without that restriction, this is Linux after all.) Examples include a
web site or the directory that holds a database’s files.
·
Parts of the system may be shared (using Samba or NFS).
While modern systems allow the sharing of part of a partition (that is, some
directory and all its contents), security can be difficult to enforce. It
usually works better to share whole partitions.
One way to plan out partitions is to
decide if the data is sharable or not, and if it is static or variable.
For example (review FHS,
also man hier, man filesystem):
Static – Sharable: /usr
Static – Non-sharable: /etc,
/boot
Variable – Sharable: /home,
/var/mail
Variable – Non-sharable: /var/log
·
Disk quotas are assigned per user per partition.
So to setup and control disk quotas you must plan your partitions. (For
example, student accounts on YborStudent have different sized quotas for /home, /var, and /tmp.) To enforce email
quotas, web site, FTP site, print/FAX job quotas, consider separate partitions
for each.
·
Disk partitions can be mounted as read-only or at
least noatime. On a production web server for example, most
of the system is static and could be mounted as read-only. (Even log
files can be created on a separate log server.) Some parts of the system
must be read/write to function but there are great security benefits to
mounting as much as possible as read-only. An example is /usr/share). There are
other mount options
for security: nodev,
nosuid, ...
·
Backups that span two or more tapes (or other media) can be
problematic. For one thing, if you only have a single tape drive you
can’t automate the backups as a human must be there to change tapes. It
is worth considering making enough partitions so that each one is small enough
to fit onto a single backup tape.
·
Even journaling filesystems occasionally need to be
checked with fsck
(other people’s opinions notwithstanding). If your disk is large it
might take many minutes to run fsck,
which will run automatically every so often. By partitioning a large
drive into small partitions, the SA can stagger when such checks get
done, so only a small part of the disk is (reasonably quickly) scanned at any
one time.
·
Older motherboards have a restriction on where on a disk a bootable
partition can be located (and how large it can be). This is
because older BIOSes use ten bits to hold the starting cylinder number of any
bootable partition, which means it must be located within the first 1,024
cylinders or you can’t boot from it. While not a problem with modern
hardware, it was common for older systems with large hard disks to have a small
/boot partition to
hold the few files needed to boot the system, located near the beginning of the
disk. This would include the kernel itself and the grub.conf boot loader
configuration file, amongst others. Many standard Linux distributions
create /boot
partitions “just in case” of older hardware.
A separate /boot partition may be needed on
modern systems too. This is because of an incompatibility between some
BIOS-based systems and EFI software.
Modern bootloaders use EFI with a BIOS emulation mode, but
older motherboards may require an additional BIOS boot partition
(discussed previously) to work with GPT disks. (This is similar to the Solaris
DOS partition used to support VTOC disks on BIOS-based hardware.)
·
Modern EFI/GPT disks require a separate partition, usually
created automatically when needed. This partition is called the EFI
System Partition (or ESP). The ESP holds various bootloaders, drivers,
and other files. The EFI standard says the ESP should be formatted as FAT32,
but I think on a non-dual-boot system, any OS-supported type will work. (Some
systems don’t bother creating the ESP by default, and just use a larger /boot partition.) Depending on how
many bootloaders, custom disk drivers, and other EFI software you plan on
having, this partition should be at least 100 MiB; 300 MiB on multi-boot or
experimental system would be fine.
When Not to
Partition
/bin,
/lib, and /etc should never
be separate partitions! At boot time, only / is mounted. The init program that boots the
system needs to access files in /etc
and the boot-up scripts need access to commands in /bin, which may depend on files
in /lib.
Kernel modules required to complete the boot process are also kept in /lib.
A few commands in /bin require DLLs
(.so or shared
object files) to work. These DLLs are often found in /lib, but many are kept in /usr/lib and so some
commands won’t work at boot time if /usr
is a separate partition. In /bin,
/sbin, /rescue (BSD), or /standalone
(Solaris) you may find some static versions of critical commands; the
exact set and location varies with your flavor of Unix. (See partitioning.htm#fn1)
Starting with Fedora 17, the bulk of the
files historically found in the root partition are now found in /usr instead. (Apparently, Red Hat wants to
redo the filesystem hierarchy standard.) So /bin, /lib, and other directories are now just
symlinks to /usr/bin, /usr/lib, etc. On such systems, the root partition can be smaller and /usr must be made larger, however, I would
suggest you keep /usr part of the root partition.
(Show Web Resource Partitioning.htm
for example layouts, including for Solaris 10.)
When the
Partition Plan Fails
A problem with having many partitions
is that you can run out of space in one partition while another has excess
capacity. When the partition plan fails, you may have to create a new plan,
backup all existing data in archives, re-format the disk, and restore all the
data.
Obviously, this reformat -and-restore
procedure should be avoided if at all possible. One commonly used technique to
handle this situation is to use symbolic links rather than
re-partition. Suppose for example you need to install a “nifty” word processor
application in /opt/nifty, only
the /opt partition (which might
be the root partition) doesn’t have enough free space. How annoying! But if /var partition does have extra space,
you can create a symlink to use it:
# ln -s /var/nifty /opt/nifty
The problem with this approach is that
too many such symlinks can make maintenance difficult. Quotas, backups, log
files, etc., can all be affected. So such symlinks should be considered a
“hack” and not a substitute for proper planning.
Logical Volume Management (LVM)
(Review
LVM Guide web resource. Demo blivet-gui.)
Sun calls this Solaris
Volume Management (SVM). Sun, HP-UX, others often used Veritas volume
management.
LVM allows multiple disks (and/or
partitions) to be grouped into huge “virtual disks” called volume groups
(VGs), which are named collections of specially prepared disks or partitions
called physical volumes. VGs can grow and shrink by
adding/removing physical volumes to/from them. While you can create many VGs,
one may be sufficient. VGs appear to be block devices, similar to other disks
such as /dev/hda. In fact, each
VG can be referred to by the name /dev/VG_name.
(These LVM devices can be managed using dmsetup;
for example, try dmsetup ls --tree.)
The VGs can be subdivided (I hesitate
to say partitioned) into logical volumes (LVs — think of
these as the partitions or slices of a virtual disk). VGs don’t use either the
DOS scheme or the VTOC scheme, so your OS needs a special device driver to use
these. (No BIOS currently can!)
Each LV can hold a filesystem. Note
each LV must fit entirely within a single VG. With LVM, the LVs (and the
filesystems in them) can be grown by allocating more disk space to them, in
chunks called physical extents (usually 4MB each). While LVs
should be planned as discussed previously for partitioning, there is less
danger if you miss-guess as you can always grow the LV later!
The picture below is not completely
accurate, as a volume group can span multiple physical volumes.
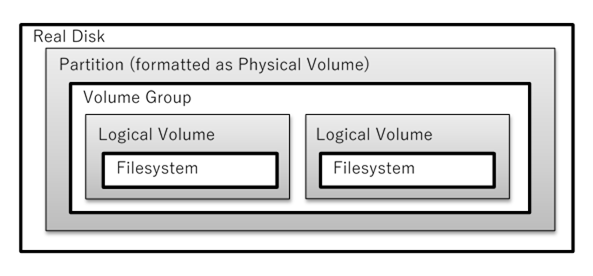
Note growing/shrinking an LV is a
separate operation from growing/shrinking the filesystem within that LV.
(There are exceptions.) Also, not all filesystems types support growing and/or
shrinking at all. (XFS only supports growing.) In those cases, you need to
backup the files to an appropriate type of backup or archive, create a new
filesystem in the resized LV, then restore the files. NTFS must be
defragmented before shrinking; ext* can be resized anytime with resize2fs.
LVs have a number of parameters that
can be set (and most can be changed later) that can affect disk I/O
performance, including extent size, chunk size, stripe size, stripe set size,
and read-ahead.
LVM is complex to setup (and varies
among Unixes) but is compatible with hardware RAID, and implements software
RAID. Note that if / (root) is
a LV, then you must have a non-LV /boot
as it is the BIOS that finds boot loaders, and BIOS doesn’t understand about
LVM.
LVM
Snapshots [from LVM-HOWTO at
tldp.org]
One of the features you get with LVM is
a snapshot. This allows an administrator to create a new logical
volume which is an exact copy of an existing logical volume (called the original),
frozen at some point in time. This copy is usually read-only (although
read-write is possible; see rollback below). A common use includes
when a backup needs to be performed on the logical volume, but you don’t want
to halt a live system that is changing the data. Another use is just
performing some system maintenance; if that doesn’t work out, you can rollback
the system to the snapshot. (If it does work out, you can easily find and
diff all the files that were changed.)
When done with the snapshot, the system
administrator can just unmount it and then remove it. This facility does
require that the snapshot be made at a time when the data on the logical volume
is in a consistent state, but the time the original LV must be off-line is much
less than a normal backup would take to complete.
In addition, the copy typically only
needs about 20% or less of the disk space of the original. Essentially,
when the snapshot is made nothing is copied. However, as the original
changes, the updated disk blocks are first copied to the snapshot disk area
before the original LV is written with the changes. The more changes are
made to the original, the more disk space the snapshot will need. This type of
snapshot is known as a COW (copy on write).
When creating logical volumes to be
used for snapshots, you must specify the chunk size. This is the
size of the data block copied from the original to the snapshot volume.
For good performance this should be set to the size of the data blocks written
by the applications using the original volume. While this chunk size is
independent of both the extent size and the stripe size (if striping is used),
it is likely that the disk block (or cluster or page) size, the stripe size,
and the chunk size should all be the same. Note the chunk size must be a
power of 2 (like the stripe size), between 4K and 1M. (The extent size
should be a multiple of this size.)
You should remove snapshot volumes as
soon as you are finished with them, because they take a copy of all data
written to the original volume and this can hurt performance. In
addition, if the snapshot volume fills up errors will occur.
Red Hat made a utility to create and
manage snapshots for BtrFS or LVM, called snapper.
Rolling Back
a Snapshot From evms.sourceforge.net
Situations can arise where a user wants
to restore the original volume to the saved state of the snapshot. This action
is called a rollback. One such scenario is if the data on the
original is lost or corrupted. Snapshot rollback acts as a quick backup and
restore mechanism, and allows the user to avoid a lengthier restore operation
from tapes or other archives.
Another situation where rollback can be
particularly useful is when you are testing new software. Before you install a
new software package, create a writeable snapshot of the target volume. You
can then install the software to the snapshot volume instead of to the
original, and then test and verify the new software on the snapshot. If the
testing is successful, you can then roll back the snapshot to the original and
effectively install the software on the regular system. If there is a problem
during the testing, you can simply delete the snapshot without harming the
original volume.
You can perform
a rollback when the following conditions are met:
·
Both the snapshot and original volumes are unmounted and otherwise
not in use.
·
There is only a single snapshot of an original. (If an original
has multiple snapshots, all but the desired snapshot must be deleted before
rollback can take place.
Example of Snapshot
Creation and Rollback
#
lvcreate -L 1G -n lv_test vg
# mkfs -t ext4 /dev/mapper/vg-lv_test
# mkdir /test /snap
# mount /dev/mapper/vg-lv_test /test
# echo hello > /test/foo
# lvcreate -s /dev/mapper/vg-lv_test -L 1G -n snap
# echo goodbye > /test/bar
# mount /dev/mapper/vg-snap /snap
# ls /test
bar foo lost+found
# ls /snap
foo lost+found
# umount /test
# umount /snap
# lvconvert --merge /dev/mapper/vg-snap
# mount /dev/mapper/vg-lv_test
# ls /test
foo lost+found
LVM (and ZFS) Tips
[from sun.com/bigadmin/features/articles/zfs_overview.jsp]
·
A small number of storage pools (or volume groups) with many
disks works better than a large number of small pools/VGs.
·
Use whole disks not partitions.
·
Try to have DB data use one controller and DB indexes use
another.
·
ZFS filesystems aren’t a limited resource. You can create as
many of these as you want. One thing you must avoid is splitting the root
filesystem as this will prevent live upgrade from working. You might
have one filesystem for each Zone, projects get their own, and anything that
benefits from different filesystem properties get their own. A good example of
the latter is media requiring an uncompressed filesystem. You can also split
backups: low volume but important data can be sent off-site, bulk data to a
local mirror.
·
With lots of ZFS filesystem, to make a snapshot for backups,
there is a recursive option so you don’t need to make separate snapshots of
each one. (LVM doesn’t have such an option currently.)
·
ZFS filesystems inherit properties from their parent ZFS
filesystem. So you can make a change to the parent and all the children will
pick it up automatically.
Storage, even for a simple single server, has become
complex. You have LVM and device-mapper (dm), encrypted disks, software RAID
(multiple disks, or MD), and newer filesystem types that incorporate these
concepts such as BtrFS and ZFS.
Red Hat created a command line tool that can work with all
these storage technologies, known as System
Storage Manager (SSM), or system-storage-manager. By using
a single user interface and multiple back-ends for the different technologies
involved, SSM can make managing your storage easier.
Choosing
a type of Filesystem
This
depends on how it will be used. Not all filesystems can dynamically grow
and/or shrink. Not all support ACLs, quotas, attributes or extended attributes
(needed for SE Linux). Some favor speed over reliability (in the event of an
unexpected system failure, not all filesystems recover well) or reliability
over speed. Some support large numbers of small files better, or small numbers
of large files better. Some include more utilities than others; UFS (BSD) and
ext2/3/4 (Linux) include dump
and restore utilities for backup
and recovery, fsck for system integrity
checking and repair, tunefs (tune2fs) to examine and change
filesystem settings, and other tools to resize a filesystem or to defrag one.
On the other hand, some systems include no backup/restore utilities, no tools
to change parameters after filesystem creation, and in some cases, no fsck tool.
Use the fstyp command on Solaris (non-x86)
to determine the filesystem type of some disk (or partition). For Linux and
some others, use “file -s /dev/sda” and/or “parted -l /dev/sda”.
Modern Filesystem types use journaling
to eliminate need for fsck after
a power failure (only!). ext4 is safest of these, ReiserFS, XFS require
a UPS to be safe but are much faster, especially with lots of smaller files. JFS2
works well for larger (>16-256GB, the limit for ext3) files, ok for smaller
ones, and is safer than XFS or ReiserFS. (Note the Linux file size limit of 2TB
regardless of FS type, and can be further restricted from the shell using ulimit.)
With journaling, a filesystem records
the commands for changes to a log (or journal) file. Only after that has been
written safely and completely will they make the change to the filesystem. Once
the data has been safely and completely updated, they remove that journal
entry. If the system crashes at any point, it can simply replay the journal
entries to restore the system. This works because of a property of such
journal entries: they are idempotent. That means, running such
commands more than once won’t corrupt anything.
Solaris 10 on x86 supports most common filesystem types.
You may need to install additional software packages to use them: FSWpart and FSWfsmisc. To mount such filesystems,
you need to learn the device name and filesystem type for each partition on
each disk. The prtpart x86 tool shows this information. (Solaris fdisk doesn’t work well for DOS disks.) The mount command needs the FS type; Solaris names these pcfs, ntfs, and ext2fs (ext2, ext3, and ext4).
All but DOS (pcfs) are currently supported as read-only.
Journaling filesystems depend on the
journal entries being written in the correct order. But in order to
increase benchmark numbers most disk drives have on-board caching and use disk
write reordering. Experiments have shown that there is a 1 out of 10 chance of
filesystem corruption after an uncontrolled shutdown. Linux kernel places write
barriers at intervals to prevent such corruption, but if possible, data
write reordering should be turned off (hdparm -W 0)
when using a journaling filesystem. Using RAID striping makes this situation
worse as stripes can become inconsistent.
Most journaling filesystems only use the journal for metadata,
not the contents of files. If the system crashes while writing a large file to
disk, the journal will make sure the hard link and block counts are correct,
but you still only have half a file; the data is corrupted. Ext3 and ext4 are
unusual because they journal all data (by default; you can change that). However,
this hurts performance.
Remember, a filesystem is not a database! “File systems
are optimized very differently from data bases. Databases have transactions
that can be committed or rolled back if the database or the application decides
to abort a transaction. In contrast, file systems do not support the concept of
rollback or undo logs, and one of the reasons for this is in order to get very
high performance levels, ...” [Ted Ts’o blog
post].
Ext3 and ext4 are most suited to non-server, commodity
PCs. Servers using RAID and UPSes may choose a type for performance over
protection. Recently some mobile devices switched to ext4 (e.g., android).
This has caused a problem with some applications (e.g., Firefox) which frequently
update various databases on every mouse click (awesome bar), causing annoying
delays.
Other
filesystem types commonly used include vfat (pcfs on Solaris;
matches nearly all Microsoft FAT filesystem types, and ntfs matches NTFS)
for small flash drives and floppies, and iso9660 (hsfs=high
sierra on Solaris) for data CD-ROMs, and udf is the successor to
iso9660, used on DVDs and flash drives >32GB (the max for the FAT flash
drives use standard). See mkisofs,
growisofs, cdrecord (run 1st with -scanbus to get device number
triplet; only supports SCSI so must use IDA-SCSI adopter modules) (Solaris:
cdrtool), and mkdosfs. Linux supports JFFS2 and
UBIFS, and LogFS for flash drives; MS has exFAT (a.k.a. FAT64); there are
others too.
Without a UPS, when the power fails not all parts of the
computer stop functioning at the same time. As the voltage starts dropping on
the +5 and +12 volt rails, certain parts of the system may last longer than
other parts. For example, the DMA controller, hard drive controller, and hard
drive unit may continue functioning for several hundred of milliseconds, long
after the DIMMs, which are very voltage sensitive, have gone crazy and are
returning total random garbage. If this happens while the filesystem is
writing critical sections of the filesystem metadata, you can corrupt the FS
beyond hope of recovery. Ext3 [and ext4] is designed to be recoverable in this
situation; other, higher performance FSes are not. — adopted from Ted T’So,
linuxmafia.com/faq/Filesystems/reiserfs.html
(Point
out wikipedia.org/wiki/Comparison_of_file_systems
article.)
UFS is the modern
version of the BSD FFS (1983). A UFS volume is composed of the following
parts:
· a
few blocks at the beginning of the partition reserved for boot blocks (which
must be initialized separately from the filesystem).
·
a superblock, containing a magic number identifying this as a UFS
filesystem, and some other vital numbers describing this filesystem’s geometry
and statistics and behavioral tuning parameters.
·
a collection of cylinder groups. All data for a directory and
its contents are kept (if possible) on one group, minimizing fragmentation. Each
cylinder group has the following components:
o
a backup copy of the superblock
o
a cylinder group header, with statistics, free lists, etc, about
this cylinder group, similar to those in the superblock
o
a number of inodes, each containing file attributes
o a number of
data blocks
UFS
was so popular it was adopted by most Unix vendors, who sadly made many
incompatible changes to the basic idea. Among the ideas were the inode
structure.
Inodes
(for modern UFS and similar FS types) store 15 pointers to data blocks in an
inode; the first 12 point directly to data, the 13-th is an indirect block (the
whole block contains pointers to data blocks), the 14-th is a doubly indirect
block, and the 15-th is a triply indirect block. This is not efficient for
large files.
EXT2
is fastest since it doesn’t use journaling but is very reliable. Recovery can
be slow (tens of minutes to hours per filesystem, depending on size and speed
of hardware). It is based on the original “ext” FS from 1992, which in turn
was based on Minix FS, which was based on BSD’s UFS. This is a 32-bit FS which
limits max size. Ext2 FSes can be grown or shrunk as needed.
EXT3
is a tweaked version of ext2. The major change was to add journaling.
(In fact, it is easy to convert ext2 to ext3 and vice-versa.) Unlike most FSes
that provide journaling, ext3 journals all writes to disk, not just “metadata”
(inode and directory writes). This provides more reliability than other
journaling FSes but slows down data writes.
An
SA can control what gets journaled with a setting (using tune2fs). Set “data=journal” for journaling
everything. Set “data=writeback”
to just journal metadata. Use the default of “data=ordered”
to improve performance while providing almost at much safety as for “journal” mode. With this option the
FS will write data to the disk (as a transaction) after making the journal
entry for the affected metadata, but before writing the metadata itself.
EXT4
is based on ext3. It uses 48-bit addresses rather than 32-bit. It also
changes the way large files are managed. Instead of the UFS inode pointer
structure, the idea of “extents”, first used with JFS and later with XFS and
NTFS among others) provides better performance for large files, such as those
used with DBMSes. Overall, ext4 is faster than ext3 but just as reliable.
(Ext4
originally didn’t support the ext3 “data=ordered”
mode (see above), but Ted Ts’o reluctantly
added this back.)
An extent-based filesystem doesn’t allocate space for files
a block at a time, but in large variable-sized chunks called extents.
Inodes contain a list of pointers to extent descriptor blocks, organized as a
B-Tree for fast access.
JFS
was one of the first journaling filesystems. It was developed by IBM for AIX
Unix in 2001. Unlike ext* this is a 64-bit FS designed for high performance
servers. It differs from traditional *nix filesystems by allowing several
independent disk writes to be collected and committed as a one large “group”
transition; fewer transactions means fewer journal updates and better
performance. Small directory data can be saved directly in the inode itself
(if it will fit), causing half as many disk accesses. Large directories are
not a simple list but have directory entries organized as a “B+ Tree”, a
data structure that can be searched efficiently. Another difference is the
inode table isn’t fixed in size when the FS is created, but rather inodes are
allocated as needed. JFS FSes can be grown but not shrunk. JFS also supports
different block sizes on a per-file basis.
XFS
was developed by SGI (Silicon Graphics, Inc.) for IRIX (a popular Unix in the
‘90s). In many ways it is similar to JFS. XFS is highly scalable,
high-performance file system. It was created to support file systems up to 16
exabytes (approximately 16 million terabytes), files up to 8 exabytes
(approximately 8 million terabytes) and directory structures containing tens of
millions of entries. XFS supports metadata journaling, which facilitates
quicker crash recovery. XFS file system can also be defragmented and expanded
while mounted and active; it is not possible to shrink XFS file system.
XFS
is popular with NAS systems or large enterprise storage systems. Red Hat
Enterprise Linux 7 (along with Fedora) uses XFS as the default FS (previously,
EXT4); it is also the only choice for RH’s Storage offerings. (SuSE also has
used XFS for years as the default, but recently switched to BtrFS.) XFS is
considered a mature product with high-quality code and active development (by
Linux kernel developers; independent development seems to have stopped around
2013), however XFS lacks many of the features and tools of ext4.
Red Hat’s switch to XFS in 2015 was surprising, but “it’s a
better match for our enterprise customers” stated
Denise Dumas, Director of Software Engineering for Red Hat. As for SuSE, they
say they preferred XFS over Ext4 “due to concerns about scalability as the
tools package only recently supported file systems in excess of 16TB. Ext4
also suffers from issues that require applications to be updated and make use
of fsync calls to guarantee data is committed to disk.” While I don’t think
those are valid reasons today (2016), another reason is that the author and
maintainer of ext4 recommends BtrFS.
ReiserFS
(a.k.a. Reiser3 FS) Reiser4 FS are highly innovated journaling filesystems with
many, many performance improvements. However, it lacks the reliability of
other FS types. Once considering promising, the lead developer was convicted
of murder in 2008 and the future of this FS type is uncertain.
Other
types supported on Linux include MSDOS (for FAT16), VFAT (for FAT32; pcfs on
Solaris), NTFS, iso9660 (hsfs on Solaris), UDF (used on data DVDs and large
Flash disks), NFS, and SMBFS (networking filesystems), and special purpose FSes
such as GVFS, or those for cluster use (GFS, GPFS).
When real-world applications grow beyond what a single
server can provide, you either need to scale-up (a.k.a. vertical
scale) by using a more powerful server, or scale-out (a.k.a. horizontal
scale) by using a cluster of cheap servers. With a cluster, a load-balancer
of some sort distributes work to the various servers. However, a customer
session may be composed of many interactions with a server. Some interactions
will be sent to one server, others to a different server.
To meet such needs, you either need network attached
storage (the storage is on one server and the cluster servers read/write to
it), or a distributed filesystem. There are many of these, each with different
properties (so you need to match the filesystem to the application’s use of
files). Some commonly used distributed filesystems include HDFS (used with
Hadoop), GFS (developed by Google), GFS2 (by Red Hat), GlusterFS, and Ceph
(very popular).
BtrFS
(“Butter FS” or perhaps “better FS”) has features comparable to Sun’s ZFS. It
is being actively developed by Oracle (and others). While available since 2010,
adoption is slow (2017). Theodore Ts’o has stated that ext4 is a stop-gap and
that Btrfs is the way forward, having “a number of the same design ideas that
reiser3/4 had”.
Theodore Ts’o (the primary developer of ext2/3/4)
suggested, “People who really like reiser4 might want to take a look at btrfs;
it has a number of the same design ideas that reiser3/4 had — except (a) the
filesystem format has support for some advanced features that are designed to
leapfrog ZFS, (b) the maintainer is not a crazy man and works well with other [Linux]
developers (free hint: if your code needs to be reviewed to get in, and reviewers
are scarce; don’t insult and abuse the volunteer reviewers as Hans did — Not a
good plan!).” kerneltrap.org/mailarchive/linux-kernel/2008/8/1/2780064
SuSE,
who for many years advocated XFS, now uses BtrFS as the default. “It works
with Snapper to implement snapshot and rollback, the killer function of Btrfs. You
can pick any date you saved to rollback your full system” said
George Shi. Fedora 33 Workstation also uses BtrFS as the default (but not Fedora
Server).
In
addition to performance (for large numbers of small files or a small number of
large files), reliability (journaling metadata and/or file data), and max size,
there are other differences between filesystem types: if an FS can grow
or shrink, support for POSIX data (owner, group, permissions (mode), etc.),
support for attributes, for extended attributes, for NFSv4
attributes/permissions, for MAC security (e.g., SE Linux) labels, support on
various OSes, built-in LVM/RAID features, snap-shot and rollback support, disk
scrubbing, and quota support. How important these features are depends on the
expected use of the file system.
BetrFS The Be-tree File System (pronounced “better
eff ess”) should not be confused with BtrFS! It is a newer (2020) FS that
claims much improved performance over ext4, zfs, and btrfs.
ZFS is Sun’s open sourced newest FS and
is available for Linux and other Unix systems too. (Note to self: make a
web resource). The name originally stood for Zettabyte File System
but is no longer considered an acronym for anything. The name was a misnomer
since ZFS can manage 256 quadrillion zettabytes (10^33) but there is no SI unit
prefix for that. (The only higher prefix is yotta, 10^24.) ZFS is a complete
redesign of filesystem concepts and includes LVM and RAID built-in, as well as
automatic mounting, growing and shrinking as needed, and nested filesystems. It
is very scalable, supporting very large files and directories. It also
includes disk scrubbing, a sort of continuous fsck.
Simple
ZFS commands replace many LVM and other commands (mount, mkfs,
...) [June 2006 issue of Login; has ZFS article.]
ZFS
organizes physical devices into logical pools called storage pools. Storage
pools can be sets of disks striped together with no redundancy (RAID 0),
mirrored disks (RAID 1), striped mirror sets (RAID 1 + 0), or striped with
parity (RAID-Z, really RAID 5). (See below for a full description of
RAID.) Additional disks can be added to pools at any time, but they must be
added with the same RAID level as the pool was created with. As disks are
added to pools, the additional storage is automatically used from that point
forward.
ZFS
file systems will grow (to the size of their storage pools) automatically. If
you define more than one ZFS file system in a single pool, each shares access
to all the unused space in the pool. As any one file system uses space, that
space is reserved for that file system until the space is released back to the
pool by removing file(s). (You can place a maximum size on a filesystem,
confusingly called a quota.
ZFS
file systems are not necessarily managed in the /etc/vfstab
file. Special logical device files can be constructed on ZFS pools and
mounted using vfstab, but the
common way to mount a ZFS file system is to simply define it against a pool.
All defined ZFS file systems automatically mount at boot time unless configured
not to.
The
default mount point for a ZFS file system is based on the name of the pool and
the name of the file system. For example, a file system named data1 in pool indexes would mount as /indexes/data1
by default. This default can be overridden.
Use
the format command to determine
the list of available devices, then create a pool with: zpool create pool-name
[configuration] device-file ...
Where
configuration may be mirror,
raidz, etc. Once created a
default ZFS FS is created and mounted as /pool-name.
To change FS parameters or to create additional FSes in the pool, use the zfs command:
# zfs create pool-name fs-name
To
monitor your pools, use zpool list. Likewise use zfs list
(or mount). Other monitoring
sub-commands are also useful.
Please
refer to the man pages, zfs(1M)
and zpool(1M), for more detailed
information. Additional documentation may be found at oracle.com/technetwork/indexes/documentation/index.html#sys_sw
(formerly docs.sun.com).
Another resource is the OpenSolaris ZFS Community.
[from:
sun.com/bigadmin/features/articles/zfs_part1.scalable.jsp]
ZFS
is a combination of file system and volume manager; the file system-level
commands require no concept of the underlying physical disks because of storage
pool virtualization (i.e., LVM). ZFS is a journaling FS that uses transactions
to modify the data. All of the transactions are atomic so data is never left
in an inconsistent state.
ZFS only performs copy-on-write (COW)
operations. This means that the blocks containing the in-use data on disk are
never modified. The changed information is written to new blocks; the block
pointer to the in-use data is only changed once the write transactions are
complete. That disk block is then also updated via COW. This happens all the
way up the file system block structure to the top block, called the uberblock.
(In terms of memory, COW means something different:
processes will share a single copy of a memory page until one of them writes to
that page, at which point the copy is made.)
If
the machine were to suffer a power outage in the middle of a data write, no
corruption occurs because the pointer to the “good” data is not moved until the
entire write is complete. (Note: The pointer to the data is the only thing
that is moved.) This eliminates the need for journaling data blocks, and any
need for fsck (or mirror resync)
when a machine reboots unexpectedly. (Ext4 journals all data; ZFS, ReiserFS,
and others that only journal some data aren’t as safe, but are faster.)
To
avoid accidental data corruption, ZFS provides memory-based end-to-end check-summing.
Most check-summing file systems only protect against bit rot
because they use self-consistent blocks where the checksum is stored with the block
itself. In this case, no external checking is done to verify validity. This
won’t catch things like:
· Phantom
writes where the write is dropped on the floor
·
Misdirected reads or writes where the disk accesses the wrong
block
·
DMA parity errors between the array and server memory or from the
driver, since the checksum validates the data inside the array
·
Driver errors where the data winds up in wrong buffer inside the
kernel
·
Accidental overwrites such as swapping to a live file system
With
ZFS the checksum is not stored in the block but next to the pointer to the
block, all the way up to the uberblock. Only the uberblock has a
self-validating SHA-256 checksum. All block checksums are done in server
memory, so any error up the tree is caught including the aforementioned
misdirected reads and writes, parity errors, phantom writes, and so on.
In
the past, the burden on the CPU would have bogged down the machine, but these
days CPU technology and speed are advanced enough to check disk transactions on
the fly. Not only does ZFS catch these problems, but in a mirrored or RAID-Z
(Really ZFS RAID-5) configuration the data is self-healing. One
of the favorite Sun demonstrations showcasing data self-healing is the
following use of dd where c0t1d0s5 is one half of a mirror or a
RAID-Z file system:
dd if=/dev/urandom
of=/dev/dsk/c0t1d0s5 bs=1024 count=100000
This
writes garbage on half of the mirror, but when those blocks are accessed, ZFS
performs a checksum and recognizes that the data is bad. ZFS then checksums
the other copy of the data, finds it to be valid, and resilvers
the bad block on the corrupted side of the mirror instead of panicking because
of data corruption.
In a
RAID-Z configuration, ZFS sequentially checks for the block on each disk and
compares the parity checksum until it finds a match. When a match is found,
ZFS knows it’s found a block of valid data and fixes all other bad disks. The
resilvering process is completely transparent to the user who never even
realizes that a problem had occurred.
ZFS
constantly checks for corrupt data in the background via a process called scrubbing.
The administrator can also force a check of an entire storage pool by running
the command zpool scrub. This
should be done via cron 1-2 times a month.
A
DBMS such as MySQL or PostgreSQL can be implemented on ZFS and eliminate
redundant journaling, data validation, atomic writes, etc.
Fedora 11 made BtrFS (“Butter FS” or “Better FS”)
available as a technology preview. To enable BtrFS, you had to pass icantbelieveitsnotbtr as a boot option.
ZFS vs Btrfs vs
Stratis
ZFS
is open source, but under a different license than Linux: CDDL vs GPL. The two are not
compatible, making it risky for vendors to include ZFS with Linux. Btrfs
is close (or as close as it will get) to feature-parity with ZFS and is
available in a compatible license. However, Btrfs is controlled mainly by
Oracle and Red Hat has decided to no longer support it. Instead, they launched
their own storage solution, Stratis.
See Red
Hat’s docs for Stratis for more.
Oracle
could just relicense ZFS but have refused to do so. So for Linux, you have
ext4 or Btrfs as your main choices.
RHEL
8 uses Stratis. This offers nearly the same features as Btrfs, but is actually
a front-end for XFS, LVM, and other technologies. Apparently, Red Had decided
Stratis would be cheaper in the long run, as other groups maintain the
individual technologies used. (If RH adopted Btrfs, they would need to
maintain it.)
(Due
to limitations of XFS, I personally prefer to continue with LVM + ext4.)
Lecture
5 — Storage (Disk) and Related Technology
The Storage Hierarchy [From queue.acm.org "Flash
Today" , by Adam Leventhal, September 24, 2008]
Primary storage can be
summarized as a unit of storage, or more precisely as controller containing
CPUs and DRAM, and attached to disk drives. The disks are the primary
repository for data while some memory (DRAM) acts as a very fast cache. Client
software communicates with the storage via read and write operations. Read
operations are always synchronous in that the client is blocked until the
operation is serviced, whereas write operations may be either synchronous or
asynchronous. For example, video streams may write data blocks
asynchronously and verify only at the end of the stream that all data has been quiesced; databases
typically use synchronous writes to ensure that every transaction has been
committed to stable storage.
The speed of a synchronous write
is limited by the latency of nonvolatile storage, as writes must be
committed before they can be acknowledged. Read operations first check in the
DRAM cache, which can provide fast service times. But cache misses must
also wait for the disk. Since it’s common to have working sets larger
than the amount of cache available, even the best prefetching algorithms (a
technique to anticipate the next read and fetch it into the cache) will leave
many read operations blocked on the disk.
The common technique today to reduce
latency is to use 15,000-RPM drives rather than 10,000-, 7,200-, or 5,600-RPM
drives. This will improve both read and write latency, but only by a factor of
two or so. This can be pricey. For example, a 10-TB data set on a 7,200-RPM
drive (from a major vendor, at 2008 prices) would cost about $3,000 and
dissipate 112 watts; the same data set on a 15,000-RPM drive would cost $22,000
and dissipate 473 watts. The additional cost and power overhead make this an
unsatisfying solution.
A better way to improve the performance
of synchronous writes is to add NVRAM (nonvolatile RAM) in the form of
battery-backed DRAM, usually on a PCI card. Writes are committed to this NVRAM
ring buffer and immediately acknowledged to the client, while the data
is asynchronously written out to the drives. This technique allows for a
tremendous improvement for synchronous writes, but NVRAM is expensive,
batteries can fail (or leak or even explode), and the maximum practical size of
NVRAM buffers tends to be small (2-4 GB)—small enough that workloads can fill
the entire ring buffer before it can be flushed to disk.
This is where using flash memory for an
NVRAM ring buffer is becoming popular. However, while achieving good write
bandwidth is fairly easy, the physics of flash dictate that individual writes
exhibit relatively high latency. It’s possible, however, to insert a small DRAM
write cache on top of the NVRAM buffer, treating it as nonvolatile by adding a
capacitor that in case of power loss provides the necessary power to flush
outstanding data in the DRAM to the flash cache.
Hard Disks
(Show hardware graphic: Spindles,
platters (aluminum or glass), heads.) Sectors and cylinders
(tracks) and heads (platter faces) = disk
geometry (“CHS”). Discuss speed (5,400–15,000 rpm; seek time).
Each read/write chunk is one sector (512 bytes on all disks up to
2011; starting in 2011 all disks have 4096-byte sectors). (Cylinder/track
0 is the outermost one on any magnetic disk.)
One block
(a.k.a. a cluster) is smallest chunk of disk that can be
allocated by the OS to a file, so one block is smallest file size. On Sun
systems (UFS) a block is 512 bytes (1 sector) of data, on Linux (ext[23]) it is
1024. (On Reiser4FS it is 1 byte!)
The 512-byte sector size dates from the earliest IBM floppy
disk standards. But there are problems with this size. Newer disks use weaker
signals to record the data, so more parity bits are needed per sector. Currently
(2010) each 512-byte sector has 40 bytes reserved for the low-level formatting
“start of sector” mark, and 40 bytes reserved for parity. (Prior to 2004 only
25 parity bytes were needed.)
New disks use 4096 (8 “old” sectors) byte sectors. This greatly reduces the overhead, even though the new
disks will use 100 bytes per sector for parity.
Using 4kB sectors will make many operations faster and take
less power. This is because the logical block/cluster size for NTFS and some
other filesystems is also 4kB. Also, on x86 processors the page size of
memory is 4 KiB. So, most disk operations are already 4 KiB.
Most newer BIOSes (and EFI) can support the new sector size
and new OSes can too. Note that Windows XP won’t support the new disks! Western
Digital will ship disks with an “emulation mode” to support older firmware and
OSes. In this mode performance may suffer. It would probably be better to use
a virtual machine for WinXP. (From MS: “... [Microsoft] strongly cautions
against using 512e media with Windows XP. 512e media are the latest Advanced
Format (AF) drives with an emulation layer that creates two different sector
sizes. While the system may boot up and be able to minimally operate, there
may be unknown scenarios of functionality issues, data loss, or sub-optimal
performance.
The IDEMA has mandated the
change starting in 2011. It wouldn’t hurt to stock-pile some older type disks
if you need them!
Unformatted Capacity
Versus Usable Capacity
Disks
are sold by their total unformatted capacity. Both low-level and high-level formatting
a disk takes a significant fraction of that space, as does the spare sector
list (used for mapping out bad sectors), boot code, hidden or reserved
areas on the disk, RAID and LVM metadata, etc. Since most filesystems use
blocks (or clusters) to allocate files, a file of size 1 block plus one byte
takes two blocks of disk space. With many small files the usable space can
be less than half the unformatted capacity. For example, I have a 1GB
flash drive with the standard FAT FS on it. After formatting there are 977 MB
available. I put about 200 small files on it, leaving about 700 MB reported
free. However, I couldn’t put even one more file on it!
Some
OSes allow you to adjust the block size in some filesystems to reduce wastage
(but reduces I/O speed.) Others permit packing multiple file fragments
into blocks.
Disk
Geometry and LBA (Logical Block Addressing)
The
number of sectors per track varies with the radius of the track on the
platter. The outermost tracks are larger and can hold more sectors than the
inner ones. The location of sectors is staggered as well, for efficiency.
But
disk geometry is just a triple: #cylinders, #heads, #sectors (“CHS”). The growth
of disk sizes means modern disks must lie about their true geometry. Rather
than use CHS addressing it is common to use a Logical Block Addresses
(LBA mode), in which each sector is given a number starting from
zero. The OS uses LBA rather than CHS addresses, which is then translated by
the disk to the actual sector.
Some
OSes use BIOS to access disks (which is also used at power up), and (older)
BIOS uses CHS addressing. So BIOS must know the official (but fake) geometry setting.
(Even then the disk must translate the official geometry to the real
geometry!) Others OSes directly access disks with LBAs and don’t care.
Prior to LBA the combined limitations
of BIOS and ATA restricted the useful unformatted capacity of IDE hard disks on
IA PCs to 504 megabytes (528 million bytes):
1024 cyls * 16 heads (tracks/cyl)
* 63 sectors/track * 512 bytes/sector
Later BIOSes and ATA disks use LBA mode
to work around those limits, by faking the geometry and translating to the
official one. (This still leaves a BIOS disk size limit of 1024 cylinders * 63
sectors per track * 256 heads * 512 bytes per sector = 8 gigabytes; such older
BIOS can’t boot from a partition beyond the first 8 GBs.) This is one
motivation for the modern BIOS replacements (e.g., EFI).
Modern OSes (including Windows and
Linux) are not affected by this since these OSes use direct LBA-based calls and
do not use BIOS hard disk services. Also modern BIOSes support larger disks
and LBA. Older BIOS limits affect booting: /boot
below cylinder 1024. (LBA needs to change for 2011, for the 4kB sectors.)
Shingled disks
(SMR, shingled magnetic recording) are used for very large HDDs, those
over 2 TB in size. SMR disks overlap tracks like shingles on a house, hence
the name. SMRs can only write large blocks called bands at a time,
maybe 30 MiB. To change a single disk block requires reading the whole band
into RAM, making the change there, then writing the whole band back. (This is
similar to how SSDs work.) Because of this, random writes are expensive
(slow). This affects everything when using a journaling filesystem such as
ext4, which writes small metadata blocks to the journal all the time. (Changes
to ext4 to make it SMR-aware are being proposed as of 5/2017 (“ext4-lazy”).
Before purchasing SMR disks, be aware
of the negative performance effects.
Hard disks are not reliable. They fail frequently. A 2007 Google study of 100,000
hard drives showed the average annual failure rate was 6% (1 in 20). Only 25%
of the disks survived 5 years or more. Similar studies confirm these numbers.
Manufacturers quote MTBF (mean time between failures) numbers
that are not realistic.
RAM Disks
RAM
disks (a.k.a. “ramdisks”) are a technique to use a part of memory as if it were
a disk. Programs on your system think they are reading and writing files to an
ext4-like filesystem, but the data stays in memory. Why do this?
There
are many reasons: speed was a major reason, but ramdisks are rarely used
anymore just for speed since the Unix virtual memory system is so efficient.
Instead they are used for initial booting, for /tmp
on Solaris and other OSes, for security, to mount (potentially a large number
of) disk image files, and only occasionally for efficiency. (Not all software
can be rewritten to use memory when they were designed to use files, but you
can use a ramdisk in such cases.)
RAM
disks are a section of memory that is used as a filesystem (and thus
that RAM is not available for other purposes). These can be used to speed
access to programs and other files, used while booting, or to check a disk. A
ramdisk can double the battery life on a laptop! Many servers need to
create many short-lived files quickly (such as PHP session files) and a ramdisk
is the best choice for that.
All
systems support at least one ramdisk driver (or type); Linux supports several,
some for special purposes. For example, you will see a ramdisk mounted at /dev/shm for POSIX shared memory.
Modern
Linux supports several types of ramdisks: the old “ramfs” which uses physical memory, and the newer “tmpfs” which uses both swap and RAM.
This is mostly useful for /tmp.
It can also be used to hold security-sensitive documents that shouldn’t be
written to actual disk. Note you don’t format ramfs or tmpfs filesystems!
While not ext4, they behave similarly.
Linux
since 2014 supports zram, a
ramdisk block device (unformatted) that can be used for any purpose, for
example, swap. The zram driver uses fast compression (I think the “z” is for
“zip”) and provides high performance while taking less memory than other types
of ram disks. (Note this is unrelated to zero-capacitor zram, except for the
name.) Use of zram is becoming popular (2019). See the kernel’s zram
docs for usage and other info.
The main difference between ramfs and tmpfs are that ramfs
uses physical RAM only and if that runs out your system can crash. Tmpfs uses virtual
RAM (so it can use swap space as needed). Also tmpfs allows you to specify a
maximum size to which the RAM disk is allowed to grow.
By itself,
a ramdisk is useful for temporary data files. In some cases, you want to save
the contents of a ramdisk to a file and restore the state of that ramdisk from
a file when mounting it. Such a file is usually called a disk image
file. This ramdisk plus image file technique is used during the boot
process.
Modern
Linux includes a kernel-created variation of tmpfs called devtmpfs.
The kernel creates this very early at kernel initialization, before any device
drivers are loaded. Every detected device that has a driver in the kernel will
have a device node created in this tmpfs instance, even before the device is
initialized. Then the devtmpfs is mounted at /dev.
Unix and Linux can mount an image file as if it were a
disk. This is similar to using a ramdisk and copying an image file to/from it,
but more convenient.
An
initial ramdisk is often needed during the boot process. This is initialized
from an image file. It is used as an initial root filesystem and contains some
required /dev files, /lib files, init, etc.
(SSDs,
or solid-state disks, are discussed below.)
Creating
RAM disks is easy. (For Solaris: “ramdiskadm -a mydisk 40m” will create /dev/ramdisk/mydisk, which you must
format and then mount as normal.) To create and use a ramdisk on Linux (note
no formatting needed!):
# mkdir /mnt/ramdisk
# mount -t ramfs none /mnt/ramdisk # Old
# mount -t tmpfs size=32m /mnt/ramdisk # New
# cd /mnt/ramdisk; vi foo; ...
# cd; umount /mnt/ramdisk
Live CDs and other image files must often be compressed to
fit the image on the media. A common technique is to use “squashFS”
compression. If the file command shows some image file type as this, use “unsquashfs image” to uncompress it; then
file will show the correct type (you need to know the type to
mount it).
(Linux
also has a block ramdisk driver; with that, you would need to run mkfs on it before you could mount it.)
The RAM
disk starts out small and grows as needed. With tmpfs
you can optionally specify a maximum size. This is a good thing to do since if
a system runs out of virtual memory, ugly things will happen!
When
a ramdisk is unmounted (via umount), all files in it are lost.
You can specify a max size with tmpfs, with the mount
option size=size (the default is half the size of physical RAM). The size
is in bytes but you can add a k, m, or g
suffix. You can also specify a max number of inodes with nr_inodes=number. (The default is half the number of physical RAM pages.)
On
Solaris, you can use a RAM disk for a RAID 1 mirror. This can be useful if an
application is mostly reading from the disk. In this case you can change the
read policy for the mirror to first read from the RAM disk.
More
common than a real ramdisk is to mount an image file (.img, .iso)
using a loop device. A “jukebox” can be created by putting many image files on
a large disk and mount them all. (Project 4, filesystems, discusses how to use
image files.)
Historical note: Linux
creates some fixed-size ramdisks at boot time:
ls -l /dev/ram*; dmesg | grep
-i ram
shows the system creates 16 4K RAM disks. To set the size
use the kernel (boot) parameter ramdisk_size=sizeInBytes.
Unlike ramfs/tmpfs these are not initialized. Before you can mount one of these
you need to format it with mkfs.
If planning on using ramdisks (say for /tmp) you will need a larger swap partition (and possibly more
RAM) then the standard guidelines suggest.
Solid State Disks
(SSD) — Flash Memory
This
is a newer technology that is increasingly used. It’s just a large amount of
non-volatile RAM and works like a USB flash disk. As it gets popular and/or cheaper,
there will be many changes to how storage is managed: no seek time issues, different
block sizes, etc. (Of course, there will be other issues!) (There’s a good article
on SSDs available at Ars
Technica.) As of 2017, SSDs costs about 5 times as much per GiB as HDDs, so
it will be a while before regular disks are “legacy technology”. (Show Nand flash SSD image.)
Why should you care about the technology behind SSDs? Solid state drives
have two problems that force them to deal with data differently than hard disk
drives do: they can erase data only in larger chunks than they can write it,
and their storage cells can only be written a certain number of times before
they start to fail. This number is reported a program/erase cycles per
cell, or P/E cycles. 10,000 for TLC and 100,000 for SLC are typical numbers
for 2021. A company called Greenliant
sells NAND SSDs that promise up to 250,000 P/E cycles as of 4/2020. This
makes tasks such as modifying files much harder for SSDs than HDDs. (See “endurance”
below for more info.) Thus, setup, failure modes, monitoring, and tuning are
all different.
Flash
memory can be implemented using either NAND or NOR logic. These designations
that refer to the way the flash cells are arranged. NOR flash allows for
random access and is best suited for random access memory, while NAND must be
treated as blocks and is better for persistent storage. NAND flash is cheaper
and by far the more common variety. (I am unaware of any commercial NOR flash
SSDs available today, although NOR flash is used in a variety of products.)
There
are different types of NAND flash (2018): SLC (single-level cell), MLC
(multilevel cell, which means two levels), and TLC (triple-level cell). SLC
stores a single binary value in each memory cell, using one voltage level for
“0” and another for “1”. MLC supports four voltage level values per memory
cell, corresponding to two bits of storage. TLC supports 8 voltage levels and
thus 3 bits per cell.)
Because
of its improved longevity, performance, and reliability, SLC is best suited
for enterprise (i.e., non-consumer-grade) solutions; because of its low
price, MLC / TLC (which wear out the cells several times faster; typical writes
per cell is 3,000 as opposed to 10,000 for SLC) is common for consumer-grade
SSDs; TLC is cheapest to manufacture. MLC/TLC has higher error rates than SLC
and are generally slower. Today there is also eMLC (enterprise grade MLC)
with lower error rates, but it is also slower than SLC.
NAND
Flash disks are fast to read (0.25 ms access time, compared to 8 ms for
hard disks). Random reads are more than 100 times faster than for hard disks
(Sequential reads are more than twice as fast as for hard disks).
Writing
to flash is harder; data is written in blocks (pages or rows) of 512 to
4,096 bytes, which must be erased before each write. (Bit can be flipped
from 1 to 0, but you must erase the whole block to set a single bit back to a
1!) Each block has a short lifetime as well; SLC flash is typically rated to
sustain thousands of program/erase cycles per block. For a busy server, that doesn’t
seem like much, however you might get 5-10 years from such an SSD.
Another
distinction is that NOR flash can access individual bits in each block of
data. NAND flash can only access whole rows (pages) at a time in a block.
This results in a lot less wiring for NAND, making the devices less than half
the size of the same amount of storage implemented using NOR.
Cells in NAND flash memory are arranged in rectangular
grids known as blocks. A typical block may have a million cells
or so. The rows of the blocks are the addressable units of storage; only whole
rows can be read/written at a time. A row in a block is also called a page.
A typical NAND flash memory grid (block) has 32 to 256
columns (cells) per row (page), and 4,096 to 65,536 rows. (In practice, the pages are a little larger to include
error-correction and bookkeeping data.) Each block thus stores between 16 KiB
to 2 MiB (512 KiB is common).
The blocks are grouped into planes. Each plane
might hold 1,024 blocks. A single NAND flash chip contains one or more planes;
each plane can do operations in parallel with outher planes (or whole chips; depends
on the controller). An SSD is made up of many chips, a controller, and a RAM
cache. Show SSD card image.
See also Flash
NAND array image.
NAND
memory can only be read or written a page at a time. Also, you can only
write to an erased page. Pages cannot be individually erased. Only whole
blocks can be erased.
It
takes about 1-2 ms to erase a block, but writing to an erased flash page requires
only around 200-300 µs (that’s .2-.3 ms). For this reason, flash
devices try to maintain a pool of previously erased blocks so that the latency
of a write is just that of the program operation. Read operations are much
faster: about 25 µs (that’s .025 ms) for 4k. By comparison, raw DRAM is
even faster, able to perform reads and writes in much less than a microsecond; HDD
access is about twice as slow. To deal with data arriving faster than it can
be written, consumer-grade SSDs contain some DDR2 or faster SDRAM used as a
cache, usually between 128 and 512 MB.
To
rewrite a small file (say using vi)
a solid-state drive has to copy everything on the block (say, 512KB), except
for the deleted data, to memory, then erase the entire 512KB block the file is
in, and finally rewrite all of it again along with the new version of the file.
In SSD circles, this is called garbage collection: recognizing
that a file is old and invalid, removing it, and rewriting it with good data
(many drives will collect little files in their RAM to modify and write in big
chunks, but the idea is the same). Such garbage collection significantly reduces
the speed SSDs are known for, because reading, modifying, and rewriting is much
slower than a simple write. Also, the SSD doesn’t recognize deleted files
(only the OS and it’s filesystem driver are aware) and continuously rewrites
them during this garbage collection process.
A new SSD command, TRIM for ATA and UNMAP
for SCSI, can be sent by the OS to help an SSD recognize deleted files. There
is a mount option called discard to send these commands
whenever a block is freed. However, there is a performance penalty for doing
so and many people prefer to schedule the Linux fstrim command to run once a week.
(Windows since 8 will issue TRIM when defragmenting SSDs (ref)
if the optimize option is on). You can also use the Windows defrag.exe command manually.)
Fedora since 32 schedules fstrim weekly.
Garbage
collection and other activities mean that SSDs are constantly moving data
around, writing twice as much as you might guess, and wearing out the drive
sooner than you might think.
This
design makes SSDs work differently than hard disks (HDs). When new, SSDs are
full of empty pages and seem speedy. As they age, they run out of empty pages
and must do garbage collection, which slows them down noticeably. This also
means that until the device gets nearly full, all old versions of data are
still there; overwriting a file with zeros (as with a HD) won’t generally
overwrite the file! A HD over-writes old data with new data (an in-place update).
with SSDs you need to use TRIM.
Modern
SSDs support “secure erase”, which restores the drive to original factory
state, and restores performance.
For example, in current-generation (2020) SSDs with
8192-byte pages, a block can be made up of as many as 256 separate pages (2
MiB), meaning that to write an 8KiB file, the SSD must actually first copy two mebibytes
of data into cache, then erase the whole block, then re-write most or all of
the entire 2 MiB.
As
flash cells are used, they lose their ability to record and retain values. As
mentioned above, each cell can be erased and written 3 to 10 thousand times
before failing. Because of the limited lifetime, flash devices must take
care to ensure that cells are stressed uniformly so that “hot” (frequently
used) cells don’t cause premature device failure. This is done through a
process known as wear leveling (or write-leveling).
Just as disk drives keep a pool of spare sectors on each track for bad-block
remapping, flash devices typically present themselves to the operating system
as significantly smaller than the amount of raw flash, to maintain a reserve of
spare blocks (and pre-erased blocks for performance).
Wear-leveling
has security implications: you can’t guarantee data has been erased when the
cell holding that data may have been duplicated before the erase. Most flash
devices are also capable of estimating their own remaining lifetimes so systems
can anticipate failure and take action to protect the remaining good blocks.
Wear-leveling
and the need to erase blocks before writing means data is moved about and
written multiple times. This phenomenon is known as write amplification
and can cause SSDs to wear out faster than many benchmarks indicate.
The cache works just like one on a HD and has the same
issue of data reported as written once in the cache, so a power failure results
in data corruption. The better SSDs have a large capacitor that can power the
cache long enough to transfer the data to the non-volatile SSD. (Enterprise
SSDs don’t have that, apparently because of an assumption of high-quality UPSs
in data centers.)
Another
issue to be aware of: the cells of SSDs may not fall on logical disk block
boundaries. If they don’t match when formatting the SSD, each read/write of a
disk block will require two reads or writes per block! This issue is called partition
alignment, and most partitioning tools will handle this correctly, but
some may require the sys admin specify options to align the partition disk
blocks on cell boundaries (typically, 4 KiB).
The
final issue is data loss. Like HDDs, SSDs will lose data if powered off for
too long. Enterprise SLC SSD drives stored at 25C and operated at 40C
have a typical retention rate of just 20 weeks without power. In worst-case
scenarios or high storage temps, the data on an enterprise drive can start to
fail within seven days. (HDDs usually retain data for 1-2 years in this
scenario.)
Flash
storage costs about $1-$20 per gigabyte for an SLC flash device compared with
around $50 per gigabyte for DRAM (as of 2018). Disk drives are still much
cheaper than flash, about $0.02 per gigabyte for 7200-RPM drives and under $1
per gigabyte for 15,000-RPM drives. (Checked prices 2/2018 from NewEgg and
Amazon.)
From a Slashdot
post on 2013-12-27: “After the reports on SSD reliability and after
experiencing a costly 50% failure rate on over 200 remote-deployed OCZ
Vertex SSDs, a degree of paranoia set in where I work. I was asked to carry
out SSD analysis with some very specific criteria: budget below £100, size
greater than 16Gbytes and Power-loss protection mandatory. This was almost an
impossible task: after months of searching the shortlist was very short indeed.
There was only one drive that survived the torturing: The Intel S3500. After
more than 6,500 power-cycles over several days of heavy sustained random
writes, not a single byte of data was lost. Crucial M4: failed. Toshiba
THNSNH060GCS: failed. Innodisk 3MP SATA Slim: failed. OCZ: failed hard. Only
the end-of-life’d Intel 320 and its newer replacement, the S3500, survived
unscathed. The conclusion: if you care about data even when power could be
unreliable, only buy Intel SSDs.
Recent
flash disks have improved on all fronts: smarter/faster controllers, 2 or more
times the number of write (P/E) cycles, and lower costs. Most SSD drives are
guaranteed to last 3 years (for lowest grade drives) to over 10 years for
enterprise grade drives. That’s just the guarantee; the drives will likely
last many times longer than that.
Reliability
is a function of the spacing of NAND cells. The closer they are packed, the
less reliable the device. 3D NAND or Vertical NAND (V-NAND) flash
improve reliability by spacing the cells farther apart, but have multiple
layers of such cells (the cells are stacked vertically on the chip, to be
taller but take less area).
For
example, the Intel Optane 3D X Point or the Samsung 850 EVO are faster, take less
power, and have a longer life than 2-D SSDs. (See X Point, below.) Samsung
introduced the 24-layer V-NAND in 2013, 32-layer V-NAND in 2014, 48-layer
V-NAND in 2015, 64-layer V-NAND in 2016, 9x-layer V-NAND in 2016, and 1xx-layer
V-NAND in 2019, allowing terabyte-sized but still reliable SSDs. Virtually all
modern SSDs use V-NAND to stack multiple layers of NAND flash.
A
hybrid approach is somewhat common: using an SSD as a cache for a regular HDD.
Support for this is known as bcache in Linux.
An SSD needs a more sophisticated controller than a simple
USB flash drive, to deal with management of pages and blocks, the complexities
of writing, RAID-0 like data stripping (plus some parity), wear leveling,
multiple I/O channels (to access the different chips in parallel), managing the
SDRAM cache, garbage collection, and other tasks.
SSD
lifetime, commonly known as endurance, is generally specified
either in Drive Writes per Day (DW/D or DWPD) or Terabytes Written
(TBW). These numbers represent the amount of user data the device is guaranteed
to be able to write over the device’s lifetime. Drive Writes per Day is the
most common measurement used to express an SSDs endurance specification. This
number, which can vary from under 0.1 to over 10, indicates the amount of data
that can be written each day for the warranty period. For example, a 1TB SSD
with 3 DW/D and a warranty of 5 years should allow for writes of 1TB * 3 DW/D *
(365 * 5) = ~5.5PB. Note the capacity of the drive can greatly affect endurance,
so be careful when comparing drives.
The lifespan
of consumer grade SSDs continues to improve. It is likely that a modern
(made after 2014) SSD will outlast the PC it is installed on. But for servers
and their heavier loads, SSDs will often lose their speed advantage, not last
longer than HDs, and cost more. In 2018, newer technology promises
faster/longer/cheaper, but we will have to wait to see if that is so.
Defragmenting
Filesystems and SSDs
All
filesystems write new files to contiguous blocks on the storage device.
However, over time files get deleted leaving “holes”. Sooner or later, new
data must be stored in those holes, resulting in the new files being fragmented.
Fragmentation
hurts performance in two ways. Each fragment must be read using a separate
disk READ operation (only contiguous blocks can be read in a single IOP). There
is overhead for each disk I/O operation (IOP). Secondly, for HDDs each READ
may result in a disk seek which is very slow. Even if the fragments are on the
same cylinder, other processes are issuing disk IOPs and those may end up being
done between your process’ IOPs. Thus, two or more seeks may occur between
those reads! The slower reads (and writes too) will be noticeable on large
data reads such as for backups or loading huge software/data into memory.
Defragmenting
flash storage is rarely necessary and wears out the device fasting by
performing unnecessary writes. However, defragmenting can improve
performance on SSDs, just not as dramatically as for HDDs. Modern defragmenting
tools are SSD-aware, and will issue TRIM/UNMAP commands when run, which
definitely will improve performance. (Including for Windows 8.x and newer.)
Note that some defrag tools attempt to coalesce the free space into one large
block at the end of the drive (pointless on SSDs) while other merely try to
reduce the number of fragments per file (still useful on SSDs).
For NTFS, there is also the problem of hitting the max
number of fragments for the filesystem. Without regular defragmenting, an
NTFS volume can become full and/or corrupted!
Finally,
fragmented filesystems require defragmenting before certain operations are performed,
such as resizing them.
While
the jury is still out on this issue (2017), recent research shows SSDs do
suffer some performance loss when fragmented. Unlike HDDs, this effect has
nothing to do with physical placement of file blocks. Rather, fragments cause
more disk I/O operations (the OS can only issue single I/O requests for
contiguous blocks). That and a lack of regular TRIM/UNMAP commands can cause
about a 25% performance slow-down in the worst case reported. (HDDs suffer
over 200% slow-downs when badly fragmented.)
Since
modern SSD units can last for billions of writes, an occasional defragmenting
(say 1/month) shouldn’t hurt. But don’t expect dramatic performance increases,
unless you’ve used the drive for years and have never run a tool on it (thus,
not TRIM/UNMAPs or secure erase).
There are many places in current computers and operating
systems that assume HDs and thus are not correctly configured for SSDs. The
following are some Windows 10 settings to change (in 2018), from an article
in Admin. Many of these points should be double-checked on Linux systems
as well:
·
To make optimal use of SSDs, enable
Advanced Host Configuration Interface (AHCI) mode in the BIOS/UEFI. This
requires the correct drive is installed and enabled, which you can check on
with Device Manager.
·
Many people claim that users should
deactivate the paging file on SSDs. This is not a good idea.
·
You can obtain an overview as to whether
the SSD and the rest of the hardware are working properly. To do so, start the
metric by typing winsat formal or winsat prepop at the command prompt. Toward the bottom of the list you
will see the read and write speeds of the SSD.
·
AS
SSD Benchmark freeware is very helpful when determining SSD performance. Well-known
comparison websites, such as Tom’s Hardware use the tool to compare disks.
(The home site is in German; try FileHippo’s site for
English.)
·
One problem when mirroring (copying)
Windows 10 to an SSD (from a HD) is the relationship between the start of the
boot partition and the storage blocks of the hard drive (alignment). This
problem occurs whenever you move the operating system from a magnetic hard
drive to an SSD instead of installing from scratch. If the start of the boot
partition and storage blocks do not match, SSD performance is compromised and
its lifespan shortened: The boot partition, rather than starting at the
beginning of a sector, begins in the middle, because the filesystem clusters do
not match the SSD pages. To check, call for the StartingOffset data on the
command line:
wmic
partition get name, startingoffset
Then, call the filesystem data of the
corresponding hard disk:
fsutil
fsinfo ntfsinfo c:
Check the Bytes Per Cluster value: You have to divide the StartingOffset
value by the Bytes Per Cluster. The result has to be a whole number. If this
is not the case, you should consider reinstalling Windows 10 on the SSD.
·
TRIM also plays an important role in
the use of SSDs. If you delete files from your system, their data remains on
the hard disk and is only deleted from the file allocation table (or inode
table). The actual file data is still stored on the hard drive. The OS
overwrites this data when the operating system needs the space.
Data deletion does not work the same way on SSDs. The storage blocks must be completely
deleted first before they can be rewritten. Windows 10 supports the TRIM
technology and tells the SSD which storage blocks it can delete. However, many
current SSDs come with technologies that internally delete storage blocks via
the controller and the internal firmware, and thus tell the OS not to use TRIM.
You can check TRIM support in Windows 10 by entering
fsutil
behavior query DisableDeleteNotify
If you see DisableDeleteNotify=0, then TRIM is supported, whereas DisableDeleteNotify=1 indicates deactivation. With the command
fsutil
behavior set disablenotify 0
you can enable TRIM in Windows 10.
·
To improve the performance of SSDs, you
should always install the latest firmware on the device. If the manufacturer
makes a new version, you should download and install it, then reboot your PC.
·
Some Windows tools enable automatic
defragmentation of boot files during startup. This doesn’t give you any
noticeable performance improvements with normal hard disks, but it is actually
harmful for SSDs, which is why you should disable the feature. Open the
registration editor (regedit), navigate to HKEY_LOCAL_MACHINE | SOFTWARE |
Microsoft | Drfg | BootOptimizeFunction, and set the OptimizeComplete value to
No to disable the function.
·
The Windows memory manager SuperFetch
determines user behavior and immediately optimizes memory so that frequently
used applications are temporarily stored in RAM and available quickly. The
technology can also distinguish behavior through time; thus, it is possible for
office applications to be optimized during office hours and leisure programs or
games to be optimized during the weekend. However, this function no longer
makes sense with SSDs and puts a strain on the hard disk. Windows 10
automatically disables this service when installing on an SSD, but you should
check if it is enabled from services. You can also disable the SuperFetch and
Prefetch functions in the registry by opening the registry editor, navigating
to the HKEY_LOCAL_MACHINE | SYSTEM | CurrentControlSet | Control | Session
Manager | Memory Management PrefetchParameters entry, and setting the
EnablePrefetcher and EnableSuperfetch values to 0.
·
Because SSDs consume less power than
magnetic hard drives, an energy-saving mode is of little value for SSDs. Therefore,
you can adjust the energy settings of your OS to support SSDs by leaving the
hard disk enabled.
·
Because of TRIM technology, you have to
be careful when restoring deleted files. With normal hard disks, files marked
as deleted can be overwritten immediately without doing anything to the data in
those files. However, SSDs and other flash memory devices do not work this
way: The controller truly has to delete existing data that are no longer
needed. Controllers normally run these processes if a certain memory area is
idle, which means that on SSDs and flash drives, it is possible a deleted file
has in fact been completely removed, and not just its entry in the filesystem’s
allocation table. On top of that, if the file hasn’t been deleted there may be
multiple versions of it in different blocks. Thus, special tools are needed
for data recovery from SSDs. Recuva
(from the makers of the popular ccleaner tool) is the most popular Windows tool
for recovering data on SSDs and flash drives.
3D XPoint Memory
3D
XPoint is a new kind of persistent (non-volatile) solid state memory devised
by Intel and Micron. Limited commercial releases are available (2017), known
as Intel Optane. Details on how the memory actually works are not publicly
released (yet). The cells in the blocks are manufactured in three dimensions:
rows (pages) are made up of columns of stacks of cells. This new memory is
byte addressable; you can read/write bytes at a time, same as RAM. It can also
be used as SSD. Because of the high density of the chips, 3D XPoint is much
cheaper than DRAM.
The
performance is not as good as fast RAM, but close enough for many use cases and
much better than flash technology. The performance is designed for “big data”
applications: 3D XPoint has about one thousandth the latency of NAND flash (which
has 10x the latency of DRAM), and can be manufactured tens of times the density
of DRAM, allowing for an impressive amount of memory (terabytes instead of
gigabytes) that can sustain a large number of I/O operations/second “IOPS”).
Erasing
3D XPoint memory blocks wears them out 3 to 60 times less rapidly as flash NAND
cells, so the devices last longer. Since this is just the first generation of
this new technology, I expect the performance to improve and the cost to
decrease over time. Non-volatile RAM will be a game-changer; you won’t need
traditional storage as much. (See image
of Micron 3D NAND Flash.)
Directly
Attached Storage (DAS)
This used to mean the disks were inside
the computer enclosure. Today’s servers are small form-factor rack-mounted
servers or blade servers. In either case the disks are not enclosed by the
computer. With DAS you are limited to having the disks in the same cabinet.
With DAS the disk attaches to an interface (e.g., SCSI). A cable connects that
to a host interface (the controller), which usually allows more than one disk
to be attached to the host computer.
DAS is also used for RAID devices to
attach several disks to a special RAID controller. This in turn is attached to
the host computer as if it were a simple disk.
The Future: It has
been predicted in 2016 that fast, non-volatile memory may make all storage
technology obsolete (and require re-designing operating systems and programs).
The technology exists now (3D X Point), but the price is high.
Disk Controllers
There are two common types of disk controllers:
IDE (or EIDE or ATA), used with SATA, and SCSI.
The controllers support many options (we’ll learn some of these later). One option
to know about now is a write cache, which should be turned off
for reliability. However, leaving it on (the usual default) dramatically
increases performance.
Solaris provides the tool fwflash(1M) to
examine and load (or flash) firmware on some models of HBAs (which are
sometimes referred to as host channel adaptors, or HCAs).
IDE/ATA
Allows two devices per IDE controller
(technically called a channel), referred to as the controller and
the other the worker (even though neither controls the other). It is
common to have two controllers per workstation, referred to as the primary
and secondary. ATA disks must be within 18" of their
controller, so sometimes the controller is connected to a host with a cable to an
HBA (Host Bus Adaptor; see below).
IDE became EIDE then ATA (Advanced
Technology Attachment, a.k.a. PATA, ATAPI, and UDMA) to support
CD-ROM and other devices. Not as fast (~133Mbps) or reliable as SCSI, but cheaper.
18" cable max length, so it’s
good only for DAS. The controller is usually integrated into the motherboard. To
date (2021) there have been 9 versions of the ATA standard (plus some
unofficial ones and the newer SATA standards).
AT (since v3) allows sneaky commands to
permit the disk to hide some space from the OS, using a Host Protected
Area (HPA) and Device Configuration Overlay (DCO).
Actually, at boot time the OS can access the HPA then lock it down so Microsoft
can hide stuff there. The HPA and DCO are hard but not impossible to access,
with special software.
Serial ATA
(SATA or S-ATA) is the successor
to IDE, which was retroactively renamed Parallel ATA (PATA) to distinguish it
from Serial ATA. ~300Mbps, more than double the speed of the older IDE
(parallel ATA) disks (but slower than SAS). Modern workstations use SATA. The
cables are much smaller (versus the 40+ pin ribbon cable), and can be 1 meter
in length (versus 18"). To the OS, each disk appears as the main
on a separate IDE controller. (I.e. one disk per controller.)
With older hardware, parallel cables were faster since you
could send 8 (or more) bits simultaneously, compared to serial (where you might
also need extra bits sent to control timing). But with modern electronics, the
speed that data is sent is much higher. Parallel wires generate
interference, putting a limit on the top speed they can use. Serial cables are
now capable of higher speeds than a parallel cable, are cheaper, and easier to
work with.
SATA drives are geared mostly toward
end-user systems, not servers. Then tend to try to automatically fix any
detected errors (which can cause delays that cause software or OS time-outs).
For use in RAID systems, you want the drive to report errors as quickly as
possible, so the data can be fetched from another device in the RAID set.
Write caches may be unreliable, and advanced control commands (e.g., to flush
the cache) may be ignored. Also, firmware tends to be upgraded fairly often
even on the same model drive; thus it may be impossible to replace one bad
disk. (There is such a thing as enterprise (or RAID) grade SATA drives,
but these are much more expensive.)
There are other differences between
SCSI and SATA, including some marketing ones (vendors use SCSI for their
higher-grade products). Generally however, SATA is as fast and as reliable as
SCSI today. SATA disks are generally “consumer grade”, usually 5400 to 7200
RPMs (some are available up to 10,000 RPMs), and come in very large capacities.
The 6 Gib/Sec limit of the SATA bus was plenty for HDs, but
not fast enough for SSDs. Today there is SATA Express, using the
same physical connector as SATA but using PCI Express lanes to boost speed. An
x2 (two lanes) SSD is faster than the 6 Gib/Sec of SATA, and you can use 4x or
more.
For SFF (small form factor) and similar devices, a
different bus, M.2 is becoming (2015) common. Like SATA Express,
it uses PCI Express lanes.
SCSI
A SCSI device includes a “controller”
that talks to the system’s SCSI bus controller. (That makes SCSI disks more
expensive than ATA ones.) The system SCSI controller is slightly misnamed, as
it is only a bridge connecting the SCSI bus to the host bus; it passes commands
and results between the CPU and the SCSI devices. (A system SCSI controller is
sometimes also known as a host bus adaptor, or HBA.)
The SCSI bus can connect disks or any
similar devices: CD-ROM, DVD, Tape, etc. These devices are peers on the
bus, just like with Ethernet NICs. SCSI disks are mostly considered “enterprise
grade”, although it’s notable that Macintosh computers have always used SCSI.
Today you are likely to use Serial Attached SCSI or SAS. (Discussed
later.)
Compared to the disks usually sold with
SATA controllers, these disks generally have smaller capacities but are much
faster, often 15,000 RPMs. The drivers report errors quickly, which is needed
for RAID use. The firmware tends to be more stable too, making it likely you
can replace a failed disk someday with a compatible one. However, all that
speed and reliability comes at a price; SCSI is more expensive than ATA disks.
The SCSI controller is physically part
of the disk so you purchase, unlike ATA disks which do require an extra
controller per disk. This helps makes SCSI disks more expensive than ATA
disks. With SANs, the actual SCSI disks may be far away, and a special type of
NIC called an “HBA” is used to talk to them.
With some manufacturers, the same physical disk can be used
with either ATA or SCSI controllers. You merely change the drive enclosure
(which contains the controller electronics).
With IDE/EIDE/ATA/ATAPI, the device
driver sends commands to the controller, which sends AT (ATAPI is “ATA Packet
Interface”) commands to the disk (by loading data registers, then sending a signal).
In contrast, with SCSI the device driver sends SCSI commands directly to the
device (disk). The SCSI controller or HBA simply forwards those commands onto
the bus (and sends any reply back to the device driver).
Many devices (8 to >95) can be daisy-chained
together, with the end of the chain needing termination. The
electrical specifications for a SCSI bus require each end of the bus to be
properly terminated. You must use the appropriate type of terminator for
your bus; passive, HVD or LVD. If the controller is controlling only an
internal bus or only an external bus, it will usually provide termination
either automatically or via BIOS configuration.
Although ATA disks must attach to the
host with a cable no more than 18", the total length of the SCSI daisy-chain
is 1.5 meters (UltraSCSI), 3 meters (FastSCSI), 6 meters (old SCSI), 12 meters
(low-voltage differential, or LVD SCSI), and 25 meters (high voltage
differential, or HVD). If your disks are further away from the host than those
limits, you must use some remote storage technology.
If you mix wide and narrow devices on one SCSI bus, be
aware that the termination for narrow devices may occur in a different place to
the termination for wide devices.
SCSI
IDs
Each device is assigned a unique SCSI-ID
(or SCSI address), with the controller usually assigned ID 7. (The boot
disk usually gets ID 0.) Older, “narrow” SCSI has 8 IDs (0–7), while “wide”
SCSI has 16 (0–15). These IDs may be set automatically or manually. You
may have to manually assign SCSI-IDs to avoid conflicts!
Devices on a SCSI bus have a
priority. The higher IDs have higher priority. The extra 8 IDs for wide
SCSI all have lower priority than 0. So the priority order of IDs is: 8
(lowest), 9, 10, 11, 12, 13, 14, 15, 0, 1, 2, 3, 4, 5, 6, 7 (highest). Devices
that cannot tolerate delays (such as CD or DVD recorders) or slower devices
(such as tape drives) need high priority IDs to ensure they get sufficient
service.
Devices such as RAID controllers may
present a single ID to the bus but may incorporate several disks. In addition
to the ID, the SCSI addressing allows a Logical Unit Number or LUN.
Tapes and single disk drives either do not report a LUN, or report a LUN of 0.
A SCSI adapter may support more than
one SCSI cable or channel, and there may be multiple SCSI adapters in a
system. The full ID of a device therefore consists of an adapter number, a
channel number, a device ID, and a LUN.
Devices such as CD recorders using IDE-SCSI emulation and
USB storage devices will also appear to have their own adapter.
SCSI
LUNs:
A SCSI device can have up to 8
‘sub-devices’ contained within itself. (Some SCSI busses support more than
this: 32, 128, or even 254.)
The most common example is a RAID
controller (single SCSI ID) with each disk (or more commonly a logical volume)
in the array assigned a different LUN. Another example is a CD-ROM jukebox
that handles more than one disk at a time. Each CD/DVD is addressed as a LUN
of that device. Most devices (such as hard disks) contain only one drive and
get assigned LUN zero. Some of these devices internally ignore LUNs and if
queried will report the same device for any LUN. Beware of auto-detection!
Each unique controller.channel.scsi-id.lun
gets a device in /dev. On
Linux, disks will be named /dev/sd?,
tape drives will be /dev/st#,
and CD and DVD drives will be /dev/sr#
(deprecated) or /dev/scd#.
Example: a software RAID of two disks will appear as /dev/sda (the RAID’s logical device), /dev/sdb and /dev/sdc (the disks within the
array). Usually you only access /dev/sda, but may need to access
the others to re-mirror or to get status. Of course, if using hardware RAID,
you won’t see the sub-devices at all on your system.
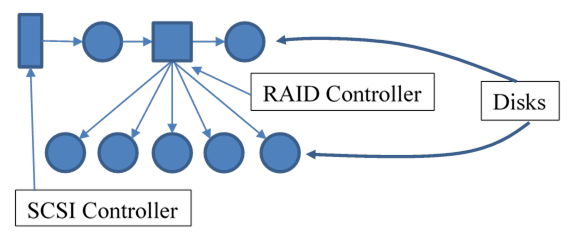
(In this diagram, the devices in the
top row get SCSI IDs; those in the bottom row get LUNs.)
All SCSI devices regardless of type get
assigned /dev/sg# as well. You
can use the Linux sg_map command
to see which devices correspond to the generic ones.
Note: A RAID controller plugs
into the SCSI chain and the disks plug into the RAID controller’s internal bus,
which may or may not be SCSI (so as to use cheaper ATA disks). The RAID
controller usually won’t report the LUNs to the SCSI driver in your kernel.
Linux provides a large number of commands to query and
control SCSI devices, all starting with “sg”. Try (as root) “sginfo device”.
SCSI
Types
SCSI is faster, more flexible, and more
expandable than IDE and is used almost universally on servers, but usually is
considered too expensive for workstations. Note that a disk must have the
correct connectors as well as the correct on-board software to talk to an HBA
(often called the controller).
SCSI is very fast (>300Mbps),
reliable, and allows longer cables than IDE. There are several incompatible
SCSI standards in use today. The devices/connectors are marked with
different symbols (SE, LVD, and DIFF) but it is up to you to not mix incompatible ones
(some devices may be marked as SE/LVD which can use either). (Mixing
types can cause serious damage and risk electrical fire!) Types:
SCSI-1 8-bit bus, 5MBps, bulky
Centronics connector.
SCSI-2 Same as SCSI-1 but with
Micro-D 50 pin connector.
Fast 8-bit bus, 10MBps,
Micro-D 68 pin connector.
Ultra 8-bit bus, 20MBps,
Micro-D 50 pin connector.
Ultra2 8-bit bus, 40MBps,
Micro-D 50 pin connector
Ultra3 (a.k.a. Ultra-160)
8-bit bus, up to 160MBps
Ultra-320 320MBps
Ultra-640 (a.k.a. fast-320)
640MBps but limited cable length, # devices
Wide 16-bit
bus, 10MBps (same clock rate as SCSI-1), Micro-D 68 pin connector
There are also fast
wide, ultra-wide (a.k.a. SCSI-3), wide ultra2, ...
iSCSI Ultra-3
SCSI but using TCP/IP and Ethernet for the bus.
Serial SCS and other
new developments: not really SCSI but uses SCSI command set to communicate with
devices.
Although many of these busses support
high speed by default, the clock rate will automatically adjust down to the
speed of the slowest device on the bus. So use 2 controllers (1 for slower
tape/CDROM, one for fast disks). You can manually set the speed to adjust for
longer than normal cable lengths or flaky devices.
Controller
Protocol Example: SCSI Commands
An OS must use a controller’s protocol
to tell it what to do. In SCSI terminology, communication takes place between
an initiator (typically the host) and a target (typically one of
the disks). The initiator sends a command to the target which then responds.
SCSI commands consist of a one-byte operation code followed by five or more
bytes containing command-specific parameters. At the end of the command
sequence the target returns a Status Code byte which is usually 00h for
success, 02h for an error (called a Check Condition), or 08h for busy.
There are 4 types of SCSI commands:
N (non-data), W (writing data from initiator to target), R (reading data), and
B (bidirectional). There are about 60 different SCSI commands in total. (AT
commands are simpler.) Here are a few:
·
Test unit ready - “ping” the device to see if it responds
·
Inquiry - return basic device information
·
Request sense - give any error codes from the previous command
·
Send diagnostic and Receive diagnostic results - run a simple
self-test, or a specialized test defined in a diagnostic page
·
Start/Stop unit
·
Read capacity - return storage capacity
·
Read
·
Write
In all cases (both
DAS and remote storage) the older parallel interfaces (P-ATA) are going away in
favor of serial cables and interfaces. The reasons are simple: parallel cables
are bulky, expensive, slower, and have greater distance limitations than serial
cables.
Newer Storage
Controller Standards
Consumer computers
today (2016) mostly use SATA (with SCSI commands). The standard protocol
between the system and disk controllers is AHCI (Adv. Host Controller
Interface). However, these are inadequate for SSDs; server hardware tends to
use proprietary protocols. SATA v3.3 (the current standard, 2017) can only
support 500 IOPS (I/O operations per second) and 600 MBps, under ideal
conditions. SSDs could operate at 20,000 IOPS today, and prototypes have been
shown to use 2 million IOPS.
The SATA working
group decided they’ve reached nearly the limit of SATA, and suggested newer
computers switch to newer buses and protocols. Currently, PCIe (PCI express)
is recommended as it can support up to 1 GBps, and can use multiple parallel
“lanes” (2x, 4x, etc.).
There’s still the
limit of AHCI though; it cannot take full advantage of PCIe. For modern SSDs a
newer standard is needed.
NVMe (non-volatile memory express) replaces
AHCI and other solutions such as SATA and SAS (where a controller plugs into
PCIe and the SSD plugs into the controller). Modern SSDs simply plug into PCIe
slots, but needed proprietary drivers to talk to the disk. NVMe is an open
standard for this use. (NVMe is really the next generation of PCIe.) There is
considerable industry support for NVMe; many consumer PCs have it now (2020).
RAID
RAID (Redundant Array of Inexpensive
Disks; since modern disks are not inexpensive some have claimed the “I” means
“independent) is a technique of using multiple disks to improve performance,
fault tolerance, or both. It is a fact of life that disks, whatever technology
is used, sometimes fail. Often the failure is just some bad data (data written
≠ data read), other times whole blocks become unreliable and must be avoided,
and sometimes the entire disk dies. RAID fault tolerance helps keep the system
up in these cases, avoiding a service interruption to restore from a backup
(and the associated data loss).
Each RAID level defines
some combination of striping, replication, and parity. Striping
means to write logically consecutive sectors to different disks, which speeds
things up. Replication or mirroring makes multiple
copies of data on different disks. Parity data allows the RAID
controller can detect when some disk contains corrupted data; with enough
parity data the controller can determine which disk is bad. The system can
continue by using the remaining good disk(s).
[ Uses Flash: www.acnc.com/raid.html;
uses animated GIFs: lascon.co.uk
]
|
RAID
Level
|
Description
|
|
0
|
striping
— Spread data over disks
fast reads and writes, poor reliability
|
|
1
|
mirror
— duplicate data on 2 or more disks. (Duplex means mirror
with one controller per disk.) Requires OS support.
fast reads, good reliability, very expensive
|
|
0+1 (01)
|
mirror of RAID
0 sets
reliability and costs of RAID 1 with faster reads; rarely used
|
|
1+0 (10)
|
striping
across RAID 1 sets
same as 0+1 but more reliable; best for production databases
|
|
2, 3, 4
|
striping +
parity (slight variations in type of parity)
cheaper than mirroring with similar reliability. Slower performance due
to dedicated parity disk
|
|
5
|
striping +
(distributed) parity
can survive any one disk failure with degraded performance, otherwise
performance of striping (not quite) with reliability of mirroring but
cheaper. Most popular.
|
|
6
|
striping +
(distributed) parity (More parity than RAID 5)
can survive any two disk failures, with degraded performance. Popular for
larger RAID systems such as for SANs.
|
Most level number definitions vary. Only
RAID levels 0, 1, 1+0, 5, and 6 are standard. All these extra disks can be
expensive! Low-cost servers may have just two (identical) disks and can opt
for striping (performance) or mirroring (safety). With four disks you can
stripe across mirrored sets, or mirror each strip set.
Parity data used
for standard RAID is known as n+1 parity. Each bit of each byte of each
block of the data disks (there may be more than two) are XOR-ed to produce
parity bits (except for RAID 2). For example, assume RAID 3 (stripe+parity):
Disk1Block1byte1 = “1011 0010”, D2B1b1 = “1100 1111”, then P1B1b1 is “0111 1101”. If a disk fails, the data can be recalculated from the
others. For example if D2 fails: D2B1b1 = D1B1b1 XOR PB1b1 = 1011 0010 XOR 0111 1101 = 1100 1111.
Needing X out of Y data blocks to reconstruct
a file of Y blocks is called erasure coding. RAID 6 is “4 + 6”
(four of six) scheme. With large data sets, distributed across several data
centers, RAID mirrors are common for reliability. Erasure coding provides the
same reliability with far fewer disks, useful if a hurricane takes out one of your
data centers. However, there is an additional computational overhead, and thus
latency, with this scheme.
RAID can be supported in either hardware
or software. (Note, your book omits duplexing from definition of RAID1.) Software
RAID >0 will impact performance. (RAID 5 in software can be about 23%
slower!)
As noted previously, some modern filesystems (ZFS, Btrfs)
provide per-block integrity checks, a process called disk scrubbing. The
OS in this case computes a checksum of each disk block, stored elsewhere on the
disk. In the background, the OS continuously recomputes these and compares
with the stored version, to detect any discrepancies. This process is not a
substitute for RAID parity.
Be careful to avoid “fake” hardware
RAID controllers! If the controller is labeled as “software” or “host”
RAID, it is not a real hardware RAID controller; it uses your computer’s CPU
and memory rather than its own. (This is similar to “win-modems” and
“win-printers”.) Good, real controllers are made by LSI, 3ware (purchased by
LSI), Areca, Adaptec, Intel, and HighPoint. Some controllers are re-branded
ones such as Dell PowerEdge (really LSI). To tell the difference, you can
compare the price of several “real” controllers and if you see an unknown model
for substantially less money, it is likely software RAID. Also, the
manufacturers of hardware RAID cards/controllers will document the
specifications in some detail on their web sites. If you can’t find a detailed
specification for some RAID card, get a different one. Another way to tell is
if they offer an
If a disk in a RAID set (using mirroring) fails and you
replace it, the replacement process will put a lot of load on the remaining
disk(s) which may then fail due to the excess load!
Using RAID storage systems in a data
center (with SAN or NAS), it pays to have huge disks. The RAID system then
defines logical volumes and assigns each a LUN. This is done in a
vendor-specific way but efforts are underway to create a usable open standard
for this (SNIA’s
RAID disk data format, or DDF). Different servers are assigned different
LUNs. The OS sees each LUN as a disk to be partitioned and formatted.
The Linux software RAID driver is
called “md” (multi-device); see mdadm and consider turning off mdmonitor if not using software
RAID. See also mdmpd. On
Debian, see mkraid. On Solaris,
metainit, metattach. Note most hardware RAID
controllers are incompatible with SMART device monitoring; you’d have to access
the individual disks and not all RAID controllers make that possible.
(However, many such controllers do SMART health checks for you and have some
other way to show any issues.)
Replacing a bad disk from a hardware RAID set:
Nearly all servers have status lights on the disks,
although they may not always indicate a failure. Usually. you can determine
which is the failed disk, by examining the logs which report the
/dev/disk/by-path/ bus/SCSI notation (Solaris: /dev/dsk/cXtXdX
notation), then find the matching entry from the output of the RAID controller
software. (Show ls /dev/disk/by-path.)
Running Red Hat on HP Proliants merely need to look for the
failed drive with the bright red light on, rip it out and stick a new one in.
This is picked up by the hardware RAID controller and the operating system
never even notices!
On Solaris, you must look at the output of “cfgadm -la” and run:
“cfgadm -c unconfigure matching_disk_entry”. This
will shut the drive down and trip the LED indicator. Once the drive is replaced
with a good one, run:
“cfgadm -c configure matching_disk_entry”.
(Depending on your system (e.g., Sunfire) you run the Solaris luxadm command instead.)
Software RAID (Linux) Example: A RAID 1 array formatted with ext4:
#
mdadm --create /dev/md0 --level=raid1 \
--raid-devices=2 /dev/sda1 /dev/sdb1
# mkfs -t ext4 /dev/md0
The mdadm configuration
file tells an mdadm process running
in monitor mode how to manage hot spares, so that they’re ready to
replace any failed disk in any mirror. See spare groups in the mdadm man page. (Note
you could do this with LVM instead. LVM uses the md driver under the
hood.)
The startup and
shutdown scripts are easy to create. The startup script simply assembles each
mirrored pair RAID 1, assembles each RAID 0 and starts an mdadm monitor process. The
shutdown script stops the mdadm
monitor, stops the RAID 0s and, finally, stops the mirrors.
As mentioned previously, modern disks aren’t as reliable as
many believe. A study (Data corruption in the storage stack: a closer look
by Bairavasundaram et. al., ;login: June 2008, pp. 6-14) analyzed 1.53 million
disks over 41 months, and found that around 4% of disks develop errors that can
be detected by computing checksums (and comparing those with stored checksums).
Of the 400,000 errors found, 8% were found during RAID reconstruction and
created the possibility of data loss even for RAID5. For this reason, most data
centers today use RAID6 or better in SAN/NAS systems.
LVM and
Software RAID
Although LVM can be configured for both
stripping and mirroring (RAID 0 and RAID 1), it isn’t as good as MD for RAID
1. Basically, LVM RAID requires extra physical volume (mirror A, mirror B, and
the mirror log), and only uses one of the mirrors; the other is just a copy in
case a failure. MD load-balances between the two, doesn’t require a third
volume, and handles a disk failure very well (that is, it is easy to recover).
It is not uncommon to use LVM with stripping on top of MD (software) RAID1.
That said, hardware RAID 1 is better but more expensive than software RAID 1.
Recovery
under LVM or software RAID [From LJ article #8948 June 06 pp.52-ff]
Without LVM or
RAID, recovery is as simple as attaching the disk to a different host, mounting
its partitions, and copying the data. Using an external USB disk enclosure
makes this task easier, you slip the disk into the enclosure, and plug it into
the recovery host.
But suppose you
have this scenario: two identical hard disks set up as software RAID 1
(disk mirror). On this system you have three devices (mirrored partitions):
md0 (sda1, sdb1), md1 (sda2, sdb2), and md2 (sda3, sdb3). You can see this
setup using fdisk -l /dev/sda; cat /proc/mdstat. Use md0 for /boot, md1 for swap,
and md2 for LVM (VolGroup00). The LVM
partition holds a single LV for / (root).
To recover, you
must somehow activate the RAID partitions, restore the VG and LV data, and then
mount the resulting LV. The problem is much harder when you use default names
for your VGs and LVs, since the recovery host will see two VGs (and LVs) with
identical names! (It helps to have a specially set up recovery host that
doesn’t use RAID or LVM, or at least uses different names.)
On the recovery
host, use mdadm to scan the disk
for the UUIDs of the RAID partitions. Use that information to edit /etc/mdadm.conf to show those
RAID devices, including a non-existent second disk. Then use mdadm to activate the
disk as a split mirror (a RAID 1 disk without the second disk). The commands
are similar to this (assuming the disk appears as sda on the recovery
system):
# mdadm --examine --scan /dev/sda1
/dev/sda2 \
/dev/sda3 >> /etc/mdadm.conf; vi /etc/mdadm.conf
This
will add the following 6 lines to the file:
ARRAY /dev/md2 level=raid1 num-devices=2
UUID=...
devices=/dev/sda3
ARRAY /dev/md1 level=raid1 num-devices=2
UUID=...
devices=/dev/sda2
ARRAY /dev/md0 level=raid1 num-devices=2
UUID=...
devices=/dev/sda1
Merge
the “devices=” lines to end up
with 3 lines, and add “,missing” to the end of
each:
DEVICE
partitions
ARRAY /dev/md2
level=raid1 num-devices=2 UUID=...
Ê devices=/dev/sda3,missing3
ARRAY /dev/md1
level=raid1 num-devices=2 UUID=...
Ê devices=/dev/sda2,missing2
ARRAY /dev/md0 level=raid1 num-devices=2
UUID=...
Ê devices=/dev/sda1,missing1
Activate the RAID
devices (ignoring the missing disk) with: mdadm -A -s.
Next you need to
make the system recognize the VGs. If the recovery system doesn’t have the
same VG names in use, you can just use vgchange VolGroup00 -a -y. To work around this,
you must hand-edit the data files on the disk to manually change the VG name.
If you have a backup of the old /etc/lvm/backup/VolGroup00, you are in
luck. Edit that file and change the “00” to some number unused on the recovery host (say “01”).
Otherwise you can
copy the data from the disk block itself. That contains the needed data plus a
lot of binary data as well which you will strip out. There may be more than
one text block; use the one with the most recent time stamp. Change “VolGroup00” to “VolGroup01”:
# SECTOR_SIZE=512 # for older disks;
>2011 disks use 4096
# dd if=/dev/md2 bs=$SECTOR_SIZE count=255 skip=1 \
of=/tmp/VolGroup01
# vi /tmp/VolGroup01
The
result should be similar to other files in /etc/lvm/backup:
VolGroup01
{
id = "some-long-string"
seqno = 1
status = ["RESIZEABLE", "READ", "WRITE"]
extent_size = 65536
max_lv = 0
max_pv = 0
physical_volumes
{
pv0 {
id = "some-long-string"
device = "/dev/md2"
status =
"[ALLOCATABLE"]
pe_start = some-number
pe_count = some-number
}
}
Finally,
we can recover the VG, then the LV, and then mount the result:
# vgcfgrestore -f VolGroup01 VolGroup01
# vgscan
# pvscan
# vgchange VolGroup01 -a -y
# lvscan
# mount /dev/VolGroup01/LogVol00 /mnt
# ...
# vgcfgbackup
DAS
vs. Remote Storage:
With very high-speed networks available, it becomes possible to have the CPUs
(blade servers) in one place and the disks in another (rack) or even further
away. (The added network delay is negligible when added to the disk latency.)
This can be useful in many common situations. For one thing vibration affects
disk speed by as much as 50%; disks often need more expensive racks that dampen
noise and vibration. Special racks can efficiently hold, power, and cool many
individual disks, and provide RAID controllers for them.
A more important
reason is that separating the storage from the hosts provides you with great
flexibility — you can easily share disks among many hosts and allocate storage
easily to any host without buying bigger disks or adding more controllers per
host. You can use different types of disks for different applications (e.g.,
web server must be fast; data warehouse must be reliable but can be slower).
Having all the
disks in one place means expensive network backup can be eliminated. Special
backup systems can be expensive (e.g., a tape library with robotic arm) and it
may be an enterprise can only afford one of those, so all disks must be at that
location, whereas the servers can be in other rooms, buildings, or even other
campuses (up to several kilometers away when using optical cabling).
A number of
different remote storage technologies are available, with different trade-offs
of initial and operational costs, distances allowed, speed, reliability, and
security and management issues.
Network Area
Storage (NAS)
NAS attaches disks to
the NAS head server, which is accessed as a file server across the LAN.
Windows services will map a drive letter to some NAS volume; Unix/Linux servers
typically use NFS. This solution is cheap to deploy as it can use your
existing network(s). (Historically this is how Novell servers worked:
workstations would have limited or no disks and use a file server.) NAS allows
multiple clients to access the same storage simultaneously (shared access).
There are “cloud” NAS storage (such as Dropbox) and SOHO NAS systems, useful if
you ever plan on updating your home computer.
A problem with
this approach is that your network is used for other things and thus there are
issues of security, reliability, and bandwidth. (Qu: what issues? Ans: if network
fails or stalls, applications may crash or workstations/servers may not operate
at all. If you open a large file, you can swamp the network. File permissions
mean little if files are sent across a network where anyone can capture them.)
These issues can be addressed by using encryption and bandwidth management, or
a private LAN (say in a server farm or cluster).
Companies such as
Network Appliance and EMC make large data center NAS systems. Linksys and
others make smaller ones for SOHO use. Commonly used protocols for NAS access
are CIFS/SMB, NFS, and iSCSI.
Replacing a Failed Drive in a NAS
I had one of the four disks fail in my Synology 412+ NAS
device. The disks are used in a RAID 5 storage volume. After the replacement
disk arrived, I did this:
·
Log into the NAS via a web browser
·
Silence the alert beep
·
Identify the failed disk (it was #3;
they count from the left)
·
As my NAS is hot-swappable, I didn’t
need to power off. I pulled out the faulty drive, removed it from the
enclosure (no tools needed), put the new drive in the enclosure, then put the
drive into the NAS.
·
Back at my PC, I ran a SMART health
test on the new drive. (For production systems you should do the through test
which can take many hours.)
·
Finally, once the new drive passed the
tests, I went to the volume and hit the repair button. This can take several
days.
During all of this, the NAS continued to function but in a
degraded state.
Storage Area
Networks (SAN)
SANs use a dedicated
LAN, often with Fibre Channel (“FC”), that uses SCSI commands to connect
servers to RAID and/or JBOD (“just a bunch of disks”) systems, and backup
devices. This solution mimics DAS (from the host’s point of view). SANs
support very high speed but can be expensive, due to the extra cabling (and
possibly bridging) required. With SANs, the storage is made available as
volumes (virtual/logical disks) called LUNs and each is accessed by a
single server (at a time). Often used with clusters. But that requires
SANs support distributed file systems (such as HDFS or GFS) which
permit multiple hosts to mount the same LUN simultaneously. (Note that not all
such filesystems support concurrent write access to files.) SANs also support access
control, to determine which servers can access which LUNs.
The critical differences between SAN and NAS are that SAN
provides a host with exclusive access to a block storage device (usually using
a private network just for storage), while a NAS provides shared access to
files (often over a shared, public network).
ATA over
Ethernet
AoE is a cheap but
effective replacement for Fibre Channel or iSCSI technology, using ATA disks
connected to standard Ethernet NICs. Using standard Ethernet for the storage
network makes this attractive, however it is unrouteable and thus unsuited for
long distances. (A related system, hyperSCSI, never caught on.)
Serial
Attached SCSI (SAS)
SAS is a standard with
the benefits of Fibre Channel but supporting a wider range of devices (e.g.,
SATA drives), and at lower cost. SAS supports cascading expanders (much like a
USB hub can be plugged into another hub). SAS uses serial communication
instead of the parallel method found in traditional SCSI devices, but uses SCSI
commands for interacting with SAS devices.
SAS supports up to
16K addressable devices in an SAS domain and point to point data
transfer speeds up to 3 Gbit/s, but is expected to reach 10 Gbit/s in the next
few years. The SAS connector is much smaller than traditional parallel SCSI
connectors allowing for the popular 2.5 inch drives.
An SAS domain
is a collection of one or more drives plus a controller (service delivery
subsystem). Each domain is assigned a unique ID by the IEEE (much like it does
for MAC addresses).
For servers you may need to choose between SAS and SATA.
In brief, SAS is faster and more reliable (due to being SCSI-based) but is more
expensive and smaller sized disks than SATA (ATA-based). There is something
called enterprise (or RAID) SATA but that costs almost as much as
SAS.
SAS is to SCSI what SATA is to ATAPI.
iSCSI
iSCSI sends SCSI
requests and replies using TCP/IP protocol. Thus, it can be routed (if your
data center is large enough), work over the Internet (if you’re crazy), and
supports encryption (if you don’t use a dedicated network). iSCSI is popular
today with virtual hosts since they can all talk to a SAN via TCP/IP and thus
do not require virtualization of Fibre Channel or other specialty hardware.
SDS
SDS means software
defined storage. In many cases today, storage needs to scale;
companies may have exponential growth in storage needs. Centralized solutions
such as SAN and NAS are hard to scale, become a single point of failure, and
high performance can cost dearly. SDS is an alternative that uses commodity
hardware (cheap computers attached to disks) in a network (a cluster)
and provides high performance. SDS is also known as distributed storage for
this reason. The storage in the cluster is replicated (no single point of
failure) and distributed. (Often the data is stripped and mirrored but we
don’t call this RAID.)
For very large
data needs (so-called “big data”), accessing files in a filesystem is not a great
solution. Instead, the data is stored as objects and retrievable with keys.
The most popular
SDS solution today (2021) is probably Ceph. It is open
source with few hardware requirements, so no vender lock-in as with most SANs.
It can mimic a POSIX filesystem for older applications that don’t use the
object store interface. Ceph also has a block-device interface, so it can
mimic a SAN, often using iSCSI, and be managed like a SAN if you wish. But
newer applications use the object store interface for highest performance.
Ceph automatically
distributes and replicates the data for you, deals with failure automatically,
and provides simple user interfaces for monitoring and management. It provides
features such as encryption. It is also backed by Red Hat.
The minimum
requirement for a Ceph cluster is three nodes, but you can create three VMs on
your laptop to experiment and learn.
There are
alternatives to Ceph such as Google’s GlusterFS and Hadoop’s HDFS.
Storage
Management
With very high-capacity
storage products used, an SA will need to consider having spare disks
available. An SA will need to determine storage needs (useable space needed
now and for the near-term) and determine an SLA for backups, recovery, space
increase requests.
The storage
devices will need monitoring. The SA will also need to determine access
policies, decide if quotas should be used. Since buying new storage is often
determined by financial and political factors, you should assign LUNs for one group/department
from a single storage unit, rather than group customers with similar needs per
storage unit.
Lecture 6 — Mounting and Managing Disks
Discuss mount, umount,
/etc/fstab (BSD too;
Solaris is different and some versions use /etc/vfstab
instead). Qu: What does mounting do?
Each system has slightly different
format. Linux fields:
1. Device (/dev/hda2) or filesystem label (LABEL=/home). Using labels works well
with removable drives (and is default for older Red Hat). Use the blkid command or “lsblk --fs” as root to view the volume labels and UUIDs.
(When run as non-rood, only some devices show.)
Using UUIDs can be a pain, especially when replacing
disks. You not only need to update fstab (and possibly systemd
“mount units”), but also remember to edit or rebuild initial ram disk images,
which have a copy of fstab with the old UUIDs. When replacing a disk, it might be
easier to modify the new storage volumes’ UUIDs to match the old ones. It
is generally preferred to assign meaningful labels and use those. Using
device names works well when you only have one server (or a personal
workstation) to manage, or when entering commands manually.
Using device names such as /dev/sda1 in fstab can also be a problem. Suppose you have two disks, sda and sdb, and sda gets replaced. Depending on
where the replacement is physically connected and other factors, it may end up
named sda, or sdb with the old sdb getting renamed as sda. Using UUIDs or labels
avoids this issue.
Having an off-line copy of your journal, containing a list
of volumes and their UUIDs and labels is vital if you need to boot from a
rescue DVD and need to mount the storage volumes.
2. Mount point
(/home).
3. Type (can be auto).
4. List of mount options. Some options to know: noauto (only mount manually), ro (read only), noatime (useful for flash drives), un-hide (iso9660 only, shows hidden
files), nodev, nosuid, noexec
(enhances security), defaults
(usually the same as rw, suid, dev,
exec, auto, nouser,
async) , sync (write changes immediately, useful with removable
media), remount (change mount
options without actually unmounting and remounting), acl (enable ACLs on the filesystem; defaults to enabled
for ext4), usrquota, grpquota (enable quota processing and
limit enforcement; for ext4, “quota”
is the same as usrquota), discard (send TRIM or UNMAP commands
to disk when blocks are freed; useful only for SSDs and may impact
performance. Some users prefer to use the fstrim
command once a week via crontab.), and many other options.
These options affect who (other than
root) can mount a device, and only apply if used in the fstab file: user
(allow anyone to mount, that user to unmount), users (allow anyone to mount or unmount), owner (allow owner of device
to mount, unmount), and group
(allow members of the group of device to mount, unmount).
Also note the mount -n option, which suppresses the update
of /etc/mtab; this is needed if
remounting the root FS as read-only. (Not always needed; some systems use a
symlink for /etc/mtab to /proc/mounts, so that might work even
if / is mounted read-only, as
long as /proc is available.)
See man
mount for a complete list of
options, including filesystem specific options.
Modern Linux no longer defines in the mount man page what
are the default mount flags for each type of filesystem, when you use the “defaults” mount option (some are still documented). For ext4 (for
example), additional default options are set by the mkfs.ext4 utility which has a config file for that (/etc/mke2fs.conf).
You can override those on the mkfs command line or change them
later in individual filesystems with tune2fs.
So if mount |grep /home shows “defaults”, you don’t know what
that means by looking at the mount man page. If you want to know if mand or acl (for example) are included in
defaults, you need to check with tune2fs:
$ sudo tune2fs -l
/dev/vg/lv_home |\
grep "Default mount options"
Default mount options: user_xattr acl
In this case, extended attributes and access-control lists
are included by default, even though they don’t show in the mount output.
5. 1 or 0 (used by dump program to control which FSes to
backup, 1=yes).
6. 0, 1, 2, ...
(used by fsck: 0=don’t check
(e.g., FAT fs), else check from low to high. The same num means those FSes can
be checked in parallel, so common use is: 1=root fs, 2=other FSes, and 0 for
swap, tmpfs, FAT, optical drives, etc).
/etc/mtab
holds list of mounted filesystems, similar to /proc/mounts.
(Show; point out two root filesystems in /proc/mounts due to initrd.)
NFS and mount.
Describe “fake” mounted filesystems: tmpfs, procfs, sysfs (replacement for parts
of procfs), devfs (/etc/devfsd.conf),
udev (repl. for devfs), ...
Note, by default removable media (such as flash drives) are
automatically mounted by your GUI or another subsystem, unless you override
that with an entry in fstab. The drives are mounted under /media or /run/media.
Bind Mounts
Modern *nix systems support advanced
mounting that can appear very confusing. Instead of a single filesystem tree,
with each storage volume mounted on one or another directory (mount point),
you can use bind mounts (so-called since they are created using mount --bind) to mount any file or directory at any mount point.
Using bind mounts, one can mount all or
a sub-tree (or even just a file!) of an already-mounted filesystem at another
location and have the filesystem accessible from both mount points at the same
time. For example, you can use bind mounts to mount your existing root
filesystem to /home/auser/top,
as follows:
#
mount --bind / /home/auser/top
Then when you look inside of /home/auser/top, you’ll see the root
filesystem. When a file on the root filesystem changes, you’ll see the
modifications in /home/auser/top
as well. This is because they are one and the same filesystem; the kernel is
simply mapping the filesystem to two different mount points for us. (The fact
that you can only bind mount an already mounted “mount” means you can’t create
a loop, so “..” works fine.)
If this sounds similar to using a symlink, that’s because
it is! Bind mounts allow different mount options to be used on each “view”,
especially read-only. Symlinks don’t support that. Also, some daemons (such
as Apache) won’t follow symlinks for security reasons. Finally, in a chroot
environment, symlinks just won’t work.
Another difference between bind mounts and symlinks is that
symlinks are files, persist across reboots, and can be backed up and restored.
But bind mounts, like all mounts, are only known in the kernel’s RAM. All
mounts are lost between reboots. Bind mounts are invisible to most backup
software, which then may not work as intended.
(Linux systems usually bind mount /etc/mtab to /proc/mounts. Solaris bind mounts different versions of
some DLLs at boot time, to optimize performance.)
Current implementations of the Linux mount command restrict bind to be the only option given. So
if you want to change the mount options,
say to bind mount /var/www/html
as ~/html, as read-only, it
takes two mount commands:
#
mount --bind /var/www/html ~user/html
# mount -o remount,bind,ro
# mount |grep html
/dev/sda1
on /home/user/html type ext4 (ro,...
(Note, in the example above, /dev/sda1 is the storage volume
containing /var/www/html.) Some
distros have patches for this, so you may be able to use a single mount
command.
Bind mounts are only known in the
kernel. If you backup /home
after the above mounts, then restore /home,
the bind mount is lost. To have the bind mounts recreated after a reboot, add
the two entries to /etc/fstab:
/var/www/html
/home/user/html none bind 0 0
/var/www/html /home/user/html none remount,bind,ro 0 0
A cool trick with bind mounts is to examine an underlying
volume without first unmounting volumes on top. Suppose /var is a separate volume from /. Once your mount
a volume at /var, the command “ls /var” only shows
what’s in the topmost volume. If files were present in the root volume in its /var directory (normally, that should be empty), you can see
and manage them with “mount --bind
/ /tmp/oldroot”, which allows you to run “ls
/tmp/oldroot/var” to see files in there. (When done, unmount /tmp/oldroot.)
Private and Follower
Mounts
In addition, there are now filesystem namespaces.
This is technically known as polyinstantiation, but all it means
is that the system can maintain a per-process view of the filesystem. So
process A thinks /tmp is one
directory, while process B thinks it is another directory. This happens via a
mount option. Normally, a filesystem is mounted as shared. That
means once mounted, the filesystem will be seen by all processes. If you mount
a filesystem private, each process sees a different filesystem
(which obviously takes more time).
This can be enforced with SE Linux,
using sandboxing. For example, Fedora 16 uses a technique
similar to the following when sandbox
is enabled:
mount
--make-shared /
mount --bind /tmp /tmp
mount --make-private /tmp
mount --bind /var/tmp /var/tmp
mount --make-private /var/tmp
These commands will make /tmp and /var/tmp private (that is, per process) and the
rest of the root filesystem shared (that is, not per-process; the normal
view). The bind mounts are needed since only mount points can be made private.
Polyinstantiation can be done automatically,
using pam_namespace.so. This
works by creating a hidden (chmod 000) subdirectory named for the user (or, if
SE Linux is on, using the SE Linux security label for the user). This
directory is then bind mounted so the user only sees the private version.
Linux also supports the notion of a follower
mount (historically known as a slave mount). When /bar is a follower mount of /foo, any changes made in /foo will appear in /bar, but not vice-versa. Linux
moreover allows for recursive versions of these operations, rbind, rprivate,
etc.
Be careful of bind mounts and private mounts when
performing backups! Some tools will detect symlinks and bind mounts and not “descend
into” those, but not all do (or may not by default). (They back up the
symlink, not duplicates of the files.) In addition, bind mounts are only known
to the kernel, in RAM, and are never backed up; you need to list those in fstab to restore those “views”. Finally, if you don’t run the
backup with root privilege, you may only back up the polyinstantiated (a
per-user “view”) part of a directory that the process can see.
Overlay
Mounts
This is a special type of mount
primarily used to implement containers (such as Docker). Two or more
filesystems are mounted at the same mount point, one on top of the other. The
result is a union of the two: directories are merged so you see all the files
from all filesystems (if two directories contain files of the same names, the
upper one hides any lower ones.)
Overlay mounts allow a type of
persistence for container images that are typically read-only. It is also used
for persistence for live images.
Disk and Filesystem
Management Commands
You can view information about mounted
storage volumes using several commands: mount,
df [-ait], du
[-x], [rep]quota, lsblk,
blockdev, and findmnt. Use the findmnt(8) command to see the details
of the bind mounts. (Show findmnt; findmnt --fstab --evaluate;
mount -t ext4.) To see just your storage volumes, use the Linux
command lsblk. I use an
alias for this to show just the most useful info:
alias lsblk='lsblk -o NAME,GROUP,SIZE,MOUNTPOINT'
(Also show “sudo blockdev
--report”.) You can show
everything with:
#
lsblk --output \ NAME,KNAME,RA,RM,RO,SIZE,TYPE,FSTYPE,LABEL,PARTLABE\
L,MOUNTPOINT,UUID,PARTUUID,WWN,MODEL,ALIGNMENT
Or with less output:
#
blkid -s device -s LABEL -s TYPE -s LABEL -s UUID \
| sort -V
No filesystem can be un-mounted if it
is in use. To see what processes are preventing an un-mount of some volume,
you can use:
fuser
-cu mountPoint (POSIX; limited but useful functionality),
or lsof +D dir (Gnu).
(Note that mounts on
subdirectories also keep a filesystem busy, even though no processes are
using it.)
fuser is standard in POSIX. lsof is more powerful but non-standard (but common). For
process details, try:
# ps -fl $(fuser -c /home 2>/dev/null)
Linux (and Fedora in particular) uses GVFS, a type of fake
filesystem (part of FUSE, filesystem in user space). When a user logs
in, a mount is sometimes done in ~/.gvfs. These and other mounts keep
/home busy even when no process is using the filesystem. You
must un-mount these child mounts before un-mounting the parent
filesystem. Use mount and grep to find these. Linux
supports a recursive umount option.
Systemd also runs user session processes that may keep a
device busy.
To see size used and available space,
you can use: df [-ia], du, [rep]quota
(discussed in detail later). Use -h
or --si options for nicer output
units; for BSD systems, set the environment variable BLOCKSIZE to k
or m for nicer output. Like findmnt, df has a -t
option to restrict output to just one type of filesystem. The du option -x restricts output to just one filesystem, useful to
find disk hogs.
Auto-mounters (Solaris: /home is controlled by auto-mounter,
turn this off or you can’t use /home).
(Demo: vi /etc/auto.*; init.d/autofs start; ls /misc/floppy).
Important disk related commands: [g]parted, [cs][fg]disk . The “f” commands work with older BIOS/DOS
disks, while the new “g”
commands work with EFI/GPT disks. (c?disk
uses a curses GUI; s?disk is
scriptable.) An ISO image file for a bootable CD for gparted can be found at sourceforge.net.
Once the disk and kernel know about
your storage volumes, you need to format them to hold data. (Or, you can
format them to be used with LVM; then the logical volumes need to be
formatted.) Use mkfs (mkfs.{ext2,msdos}, mke2fs, mkdosfs),
mkswap.
To check and repair filesystem, use fsck, (e2fsck, dosfsck),
discussed below. (All filesystems have such a tool, not always called fsck though.) Orphaned inodes
found by fsck get a hard link in
the directory lost+found. After
a disk crash and resulting fsck,
you need to check each lost+found
directory for any such files. You can use badblocks
to find and remove bad blocks (any found are assigned to a special file, so
they can’t be used by other files).
(Linux systems had a useful package
called fslint, that installed
many CLI utilities and a GUI for them that can do all sorts of things fsck doesn’t: find duplicate files,
bad symlinks, files with bad or illegal names, etc. Sadly, fslint was written
in Python2 which is no longer supported or available. Development for fslint
stopped in 2013. A decent replacement is Czkawka, actively maintained as of
2021, but it doesn’t yet do all that fslint did.)
To avoid crashing a stuck system and then needing to wait
for fsck when rebooting, it is often possible to issue low-level
commands from the console. This requires the use of the special SysRq key (often
the same key as Print Screen). To use, you hold down ALT+SysRq+command,
where command is a single letter. (On some systems, you will need the
control key too.) See wikipedia.org
for SysRq details. To reboot a stuck system, use these commands in sequence:
R, E, I, S, U, and B (Reboot Even If System Utterly Broken).
tune*fs
(and other *tune commands)
show and edit the superblock; for UFS on Solaris, use tunefs). Use this to see
information about the filesystem or to change various options. The debugfs utility is mostly used by
forensic examiners and hackers. (You will use it in an upcoming project.)
To change fsck options (and to implement a staggered
schedule) for ext2/3/4, use:
tune2fs -i #[d|w|m],
-T YYYYMMDD[[HHMM]SS] |
now.
Also use -c max_count, -C current_count.
(You normally set both, the same way you change the oil in a car every 6 months
or 6,000 miles.)
The ext[234] tool badblocks runs e2fsck with the -c option. This reads the disk
and any bad blocks found is added to a special badblock file, so those blocks
will never be used for other purposes. Note this is different from the low-level
formatting that maps out bad blocks at the disk driver level.
fsck
— filesystem check
All data in disks suffer from
corruption over time. This can happen with power outages/glitches, EMF
(including from sun-spots!), software errors in device drivers and elsewhere in
the kernel, and aging hardware that simply breaks down over time. This corruption
is sometimes called bit-rot. To address this, a system can use
journaling, redundant data, checksums, and RAID hardware. In spite of all that,
errors will still occur.
Periodically, a filesystem can be
checked (“fsck” means filesystem
check), and in some cases automatically repaired. If a filesystem isn’t
unmounted cleanly, fsck
will be run on it automatically at the next boot. (Depending on what fsck finds wrong, the problems may or
may not be automatically fixed.)
The name of the utility to run this
check varies with the type of filesystem. For XFS, it is called xfs_repair. (All the XFS utilities
for Linux are named xfs_*.)
ZFS runs a daemon to continuously scan the checksums for
errors (and if possible, fix the error), a process called disk scrubbing.
Most systems only check when you run fsck. (Older Windows systems
used scandisk.exe (up to FAT32), and modern Windows systems use an updated
(and better) tool, chkdsk.exe, which works for NTFS too).
To check (and repair if necessary) a
filesystem with fsck, it
must be unmounted, or mounted as read-only. If a filesystem is in use,
there is no guarantee the data is valid (due to RAM caching). Worse, the
automatic sync-ing of the cache
will re-corrupt the filesystem. You can un-mount (with “umount”) most filesystems if there’re
not busy (“in use”), in order to run fsck
on them. But you may find some filesystems are busy (the one holding /var/log/* for example) and those
can’t be un-mounted until you stop (“kill”)
the process using it. One way to find those is: fuser
-c mountpoint. (e.g. “fuser
-c /home”.)
Fun ext4 fsck facts:
·
fsck may require many passes to fix a disk. You must keep
running fsck until it reports no more errors found.
·
Even a journaling filesystem can become
corrupted (when the journal file itself has errors). Usually however, fsck on such systems will do nothing if the journal is okay,
and will run very quickly.
·
After repairing a mounted disk, you
must reboot it at once, or the parts of the filesystem cached in memory will be
written back to the disk and corrupt it again.
It can take from seconds to hours to
run fsck! In some cases you can use an option to have fsck check filesystems in parallel
(except for root). For journaling filesystems (such as ext4), fsck by default applies any
outstanding journal transaction in its log file. If that completes
successfully, then fsck will
report no errors and end. (You can add an option to force a full check
anyway.)
Some Unixes (Solaris) has a shutdown(8) option to force fsck to run at the next boot. Linux
doesn’t have that option. The easy way on Linux systems running Sys V init is
to “touch /forcefsck” and reboot, then delete
that file. The Linux systemd init daemon ignores that file; use a boot loader
kernel parameter of “fsck.mode=force”.
Use “tune2fs” to tweak mount
settings to force fsck to run on
a schedule.
There are many disk recovery tools available, that can help
when fsck can’t. (For example, if the partition table gets
corrupted.) Some popular (Linux based) tools include:
·
TestDisk, which can correct
partition-level errors and can undelete files. (See this nice TestDisk
tutorial on how to recover files.)
·
Gnu ddrescue, which
works like standard dd but can read from damaged or faulty drives.
·
SystemRescueCD, a
Linux-based (with GUI) live distro, with any recovery tool you might wish.
·
Foremost, a Linux tool designed for
forensic work, can recover files other tools might not.
Running fsck
on the root filesystem
There is a point in the boot process
when the root volume is still mounted read-only (or not even mounted yet, when
booting using an initial ram disk), and nothing else is mounted but the system
is initialized sufficiently to run fsck.
The trick is to get the system to pause at this point, or to automatically run fsck for you at this point.
One way is to edit the Sys V init boot
script that runs, to execute /bin/sh
at the right point. Then run fsck
and other commands. When that shell exits, the boot process continues. (Then
remove the /bin/sh command from
that script.)
Another way is to boot into single user
mode, then remount / as read-only. Then you can run fsck on it. You can
remount / as read-only with the correct mount options. The command is: mount -no remount,ro /. (This remount
will fail if any processes have files open in other than read-only mode.)
Note the output of “mount” may not show the root
filesystem as read-only (“ro”) after this; it may still
show it as “rw”! This is because that status is saved in the file /etc/mtab, which is updated when you run mount. But, once you change the root filesystem to read-only, /etc/mtab can’t be updated. So the old “rw”
status gets shown. However the system does know it is mounted as read-only;
view /proc/mounts to see this.
Another (better) possibility is to add
an argument to the kernel (using your boot loader, e.g. GRUB), to force the
system to drop to a shell at the right time. On Linux systems using dracut for
the initial ram disk (Fedora uses this), add “rd.break=pre-mount”.
This pauses the boot process just before mounting any filesystems, including
the real root (recall that at this point, the ram disk is mounted at “/”). The resulting shell allows you
to run a few commands including fsck.
Using this “dracut shell” from the ram disk saves having to use a rescue
cd/dvd/usb drive to boot from, to fix problems in the root filesystem. When
done, you simply exit the shell and the boot process continues from where it
left off.
There are not many commands available in the dracut shell
by default. If there are any you might need, modify the file /etc/dracut.conf to add them. Running “dracut -f”
will recreate the initial ramdisk with the additional commands included.
While using the dracut shell is a great
trick to know, there is a simpler way to just run fsck at boot time. The boot code will check for various
mount options, check kernel options, and check for the presence of special
files, to run fsck at the right
time. This is certainly the easiest way to do this! Reading the Sys V init bootrc
script with “less” and searching
for “fsck” reveals you can add
this to the boot loader kernel arguments to force fsck: forcefsck. The systemd init
system uses a different keyword for this, “fsck.mode=force”.
Working with
images, foreign filesystem types, and swap
You can resize a disk partition with parted (best and safest practice is to
use the gparted live CD to boot
from). You can resize many filesystem types, including ext2/3/4 (use resize2fs). Linux includes the resizepart tool for this, which should
allow a resized partition to inform the kernel so no reboloting is needed (?).
To grow a filesystem, first grow the
partition. To shrink a partition, first shrink the filesystem in it. (And
always back up first!)
Newer NTFS (since ’03) have immobile blocks,
preventing resizing. Use diskeeper (diskeeper.com) or PerfectDisk
(raxco.com) to defrag first. Review FHS (www.pathname.com/fhs and/or linuxfoundation.org/tags/fhs).
See also hier(7);
on Solaris, filesystem(5).
An
image file can be attached to a loopback device, which in turn
appears like a disk to the system and can be mounted. On Linux you would use:
losetup /dev/loop0 myfs.img, then mount loop0.
On
Solaris you would use lofiadm -a myfs.img
(which would them attach myfs.img
to /dev/lofi/num). Then mount this loopback device someplace:
mount
-F hsfs -o ro /dev/lofi/1 /mnt # Solaris CD-ROM (ISO) image
mount -F ufs -o ro /dev/lofi/2 /mnt # Std. Solaris image
mount -t ext2 /dev/loop0 /mnt # Linux image
/dev/cdrom,
/dev/dvd and others are common
symlinks to system standard devices. Using standard names, many commands don’t
need to care which device is actually used. However, the SA must make sure
these links exists and are correct.
Make swap space available with mkswap, enable with swapon/swapoff. (Usually swap entries in fstab are enabled early in the boot
process by the system boot scripts.) You can have multiple volumes for swap
and set a priority on which to use first (useful with zram for swap, to specify
a backup).
Replacing
one disk with another
To replace a disk on a production
server can be complicated if the new disk is larger, or a different type, then
the original. Today, it is likely you might need to replace a smaller HDD with
a larger SSD. How can you do this, with minimum down time?
If not using LVM, you can do this: Add
the new disk, so both are available. Use dd
to image the first to the second, including the MBR/GPT. Using gdisk, adjust the size of the last
partition to use the extra space on the new disk. Next, find the UUID of the
new boot partition, and edit the initial ram disk image to know to boot from
the new disk. Edit fstab and or
systemd mount unit files with the new UUIDs. Next, reboot the host, and at the
BIOS/EFI screen, change the boot device to the new disk. Finally, after a
successful boot, you can remove the old disk. Note, if using SSD only, you can
even remove SCSI support from the kernel!
If using LVM, it is best to add the new
disk, partition it the way you want, including new LVM partitions and new VG
block sizes. Then quiesce your system, and copy the files from the old to the
new system. Finish as before, editing fstab
or systemd mount units with the new UUIDs, updating the initial ram disk
image, and updating BIOS/EFI to boot the new system. (Keep in mind, the boot
and ESP partitions will not be using LVM, so you still need to move those.)
LVM-only has another way to do this:
Add the new disk to the old VG, duplicate the existing LVs, forcing them to use
the new PV, then deleting the old LV and PV from the volume group. The result
should be migrated LVs on the new disk only.
Of course, if you can afford the down
time, it is simpler to simply backup the old files, restore on the new disk,
and rebuild a new initial ram disk image. Then reboot, fixing the BIOS/GPT
settings.
SMART
(Self-Monitoring, Analysis, and Reporting Technology)
Most ATA and SCSI disks today support
SMART. This can be used to monitor your disk drives and alert the SA to
(potential) disk problems. You must have a disk and OS that supports SMART.
The smartmontools include smartd
(the daemon that monitors disks) and smartctl
(to query disk information and to set some disk flags).
Control smartd
by editing /etc/smartd.conf.
With smartctl the most important
command is -H which give a quick
disk health check. Use -i to
see disk information; this shows if the disk supports SMART and if the support
is turned on.
smartctl
-{iH} device
and smartd can be used to check,
control and monitor disks (demo). SMART is incompatible with most RAID systems
or virtual hard disks (such as with VMware). You can download the most recent
package (“smartmontools”) for Linux or Windows from www.smartmontools.org. (Demo.)
SMART support varies widely between
drives. Often SMART data is kept is a small RAM buffer; unless you read it directly,
you can see a false picture (the old, cached data).
Data Centers
— Rack Mounted Servers
While not part of this course, you should know there are
standards for building reliable data/computing centers. These standards
include EIA/TIA 568B, and the network equipment building
standard (NEBS) in the U.S. and European Telecommunications
Standards Institute (ETSI) standard. Today there are excellent books
and on-line resources for this, even certifications and degrees. (See the Data
Center Univ. by Schneider Electric, Data Center - Wikipedia, Books
about data centers, and various
certifications.) In this course, we will discuss rack-mounting and a few
related topics only.
Racks can be
free-standing (floor mounts) or wall mounts. They may be completely enclosed
or completely open. Some racks use only two supports (centered on the left and
right sides of the shelves) and others use 4 corner supports. The primary
design criteria are:
1. Access to
equipment
— Various enclosures, locks, and latches restrict access.
2. Airflow — Cabinets are
designed to be placed side-to-side, so airflow is vertical, with vents and
mounting brackets for fans. The shelving needs to support this too.
3. Mounting brackets — Mounting
brackets have mounting holes at standard spacing and are a standard distance
apart, to allow a variety of equipment to be installed in several
configurations.
4. Grounding — The mounting
brackets are conductive, acting as grounding strips for the cabinet and
equipment, allowing the whole cabinet to be connected to the building ground.
5. Cable access — The bottom of
the cabinet is usually open, allowing external cables to drop through a raised
floor.
6. Noise (and
vibration) reduction
— Built into some cabinets.
The most common
type of rack mount cabinet is known as “EIA standard”. Most rack mounted
computer equipment is standardized to a 19" width. The internal width
of these rack mount enclosures is also “EIA standard” of 19". There are
many different server racks sizes (heights and depths) and different types of
shelving systems that can be put in to these enclosures. The form of the
modern cabinet is standardized by the Electronic Industries Alliance so that
any EIA standard equipment can be placed in any manufacturer’s EIA standard
cabinet.
All computer
equipment heights are measured in units called rack units or RUs
or simply “U’s”. One U (“1U”) equals 1.75 inches. When shopping for
rack mount cabinets you will see references to 10u, 12u, 25u, etc. cabinets.
For example: If
looking at a 25U rack mount cabinet, you need to choose some shelving that will
fit into this cabinet for your` specific application. The shelves for these
cabinets are also rated in U’s. If you choose shelving that has a rating of 5
U’s, then this particular server rack will accommodate 5 shelves. If you
choose shelves that have a rating of 12 U’s each, then this rack mount
enclosure will only accommodate 2 such shelves.
Note most racks reserve some space for a power supply,
fans, etc.
Airflow is a big
issue
when it comes to enclosed rack mount cabinets. Dissipating heat becomes
critical when storing multiple devices inside of a single cabinet. This is
certainly something you will need to take in to consideration when purchasing
your server rack cabinet. You will also want to consider noise, power supplies,
locks, and cable management. It is often best to use separate racks for hard
disk arrays, with extra noise and vibration damping.
A SA should also know something about HVAC systems. Modern
data centers usually have 208 volt (or something equally weird) power supplies,
not 120. Cooling efficiently is very important; HCC for example uses 3
Emerson/Liebert cooling systems, and fully enclosed racks. The cool room air
is drawn into the racks, and the heated air is exhausted through ducts. This
is by far more efficient than the traditional open racks, or blowing cool air
into the racks and having the heat vent into the room. These systems also
should have monitoring and alerting capabilities. (Mention Limocelli story
about HVAC phone alerts “I’m hot and I’m wet”.)
Using
Removable Storage Media
From the GUI, use floppy (today: flash
drives), CD, DVD, ... icons (after inserting media) to access disk. (The GUI
automatically mounts the media.) Use right-click on icon to choose “eject”
or just “unmount” before removing the media!
From the command line use mtools
package: DOS commands prepended by “m”: mdir a: or mcopy a:foo.txt. (Can configure which drive
letter means which drive.)
Also can use an automounter:
ls /misc/floppy.
Finally, you can just use mount and umount. Normally only root and users logged in at the
console can access removable media. Floppy device: /dev/fd0. Flash (thumb) drive is usually /dev/sda1. CD is often /dev/cd and a DVD drive is usually /dev/dvd.
Mainframes [from
linux.com, 2/25/2013, How
to Run your own Mainframe Linux]
Mainframes have been around since the
1950s, and differ from enterprise servers in three primary ways: Very large
throughput, “five nines” reliability, and flexible resource allocation.
Mainframes process huge amounts of data with very close to 100% uptime, and can
run near 100 percent capacity without performance degradation (because they are
built with massive I/O). They have giant numbers of dedicated channels and
super-fast switching for serving thousands of simultaneous transactions. A
fully tricked-out zEnterprise mainframe system can execute 50 billion
instructions per second (BIPS), and run 100,000 virtual machines. Modern
mainframes include Fujitsu’s GS21 and IBM’s Z15.
Who uses mainframes? Reported
by IBM for 4th quarter 2020: “IBM shared the following statistics on
mainframe adoption: 67 of the Fortune 100; 45 of the top 50 Banks; 8 of the
top 10 Insurers; 8 of the top 10 Telcos; 7 of the top 10 Retailers; 4 of the
top 5 Airlines.”
Mainframe hardware is very robust, with
lots of redundancy and configurability. For example, you can allocate CPUs and
memory in all kinds of ways for different workloads. Mainframe operating
systems, including Linux, have special hardware instructions for squeezing out
every bit of performance.
Mainframes are not supercomputers. Supercomputers
are about sheer raw processing power and speed. IBM’s Watson is a
supercomputer built on a big cluster and SUSE Linux.
Lecture
7 — Using and Configuring the Console and GUI, and Related Tasks
[Note: Skip this section, it isn’t
important for most SAs to know.]
A Unix or Linux system has one or more
consoles. Mostly, these run as terminal emulators (usually, a superset of ANSI)
and are 25 lines by 80 columns. However, you can designate one (or more) of these
consoles to run GUI drivers instead of the text console ones. Use
control+alt+FN<num> to switch to virtual console <num>. (See below
for how to type that when using VMware or VirtualBox.) On most systems, F1 is
the GUI. On older systems, F7 was the GUI session. Other consoles are CLI.
(Switching to another console can be convenient to run commands as root, especially
if you plan on un-mounting /home.)
System error messages would appear on
the first console (F1). But if that is running a GUI, you may not see any
messages. (The Fedora installer displays various error messages on F2 and F3.)
Using a KVM (keyboard, video, and mouse) switch, a number
of hosts can have their consoles accessed via a single terminal, or across a
network.
/dev/vcs[1-63]
are character devices for virtual console terminals (“vts”). /dev/vcsa[1-63] are the same but
include the console’s attributes (height and width, and current cursor
position). vcs0 is the current
console, and vcsa0 is for
Braille support.
You can do a screen dump of (say) vt3,
by switching to vt1 and typing cat /dev/vcs3 >foo.
Note that the output does not contain newline characters, so some processing
may be required (“|fold -w81”).
Another way to do a screen dump of a
virtual console is by using:
setterm -dump num -file file
For example, “setterm -dump 1 -file /dev/tty.
For this to be useful to see all the start-up messages, you may try to resize
the consoles to include more lines at boot time, via resizecons command on Linux. (This won’t always work.)
X window is a networking
protocol (not a GUI!) that allows X clients to communicate with an X
server, and the server with display and input hardware. The X server is
running on the local machine (where you are) while the X clients can be run
from anywhere. A special X client called the window manager
controls the look and feel of windows and icons and cursors.
X clients + - - - X
toolkit API (widgets, Motif, TK, GTK, ...)
^ |
| - - - - -+ - - - X window protocol
v
X server- - - - - - -> Window Manager (a special X client)
There are various X servers you can use
(or buy), but for Linux the standard for a long time was the open source XFree86.
That group had political differences, and changed the license terms, and has
largely fallen by the wayside of history. Some of the developers make a fork
of that project, called xorg. (See x.org
for more info.) The server uses drivers for your video (and input) hardware.
X was invented in the early 1980s, by MIT
computer scientist Bob Scheifler. He called it X because it was an improvement
on the “W” graphical system used by some MIT computers using the “V” operating
system. Eventually a number of vendors added to the code and wanted more than
one person to control it, leading to the creation of the MIT X Consortium.
It is an interesting accident of Unix history that the GUI
system controls hardware (and has drivers), yet is not part of the kernel!
This can lead to problems with the kernel and X getting confused over who
controls the hardware at any given moment. (Work is on-going to redo X so the
kernel always controls the hardware.) Another problem is that the X server
can’t easily (and therefore doesn’t) access BIOS settings, so on *nix the
keyboards default to NUMLOCK off once X starts. This is easily fixed (see
below).
Ubuntu’s founder has announced (11/2010)
that some future version of Ubuntu will use an alternative to X, probably one
called Mir. Part of the reason is that the strengths of X, the networking
stuff, isn’t needed for most workstation and PC systems, especially those that
run Linux. These features, plus tons of legacy code, cause performance and
security problems with Linux (and Unix) GUIs.
Indeed, X window has been showing its
age. Video cards are much more capable than the ones in 1980, and it no longer
makes sense to handle compositing, fonts, networking, in X. A likely successor
is Wayland, which while not
compatible with X, can run an X server as a Wayland client for supporting
legacy X clients. Wayland uses a DRM kernel module and the kernel module for
your DRM-capable video card), so there is no need for the separate daemon to sit
between them. This also means GUI apps that hose the display, only hose their
own windows; the rest of the display should continue. Currently (2013), many
distros and display managers are planning (or already do) to support Wayland.
(Update: Ubuntu 17.10 no longer uses Mir, but Wayland.)
KDE no longer ships with KDM but the
lightweight SDDM, configured
from /etc/sddm.conf. SDDM is
“theamable” via QML, and is compatible with Wayland.
You can change from the new Ubuntu interface by logging out
and choosing from the drop-down at the bottom of the screen “Ubuntu classic”. To
put the window buttons back where they belong: launch gconf-editor, navigate to Apps -> Metacity -> general, and change
the button layout to: menu:minimize,maximize,close.
Many WMs available: twm, olwm, mwm,
bluecurve, enlightenment, sawfish, compiz, etc. Most are configurable. With
the right dot files, you can control which WM is used, it’s
configuration, which X clients you wish to start automatically, and what fonts
and colors to use for various applications. Currently (2014), KDE uses kwin WM
and Gnome2 uses compiz (with add-ons from compiz-fusion) or metacity (if your
graphic hardware doesn’t support 3D acceleration).
Compiz is the default
WM for both KDE and Gnome 2, on many systems. While KDE allows you to access
and change most settings of any window manager, Gnome is more limited. Install
the ccsm command (also the package name), to configure all of
Compiz’ settings. Gnome3 uses Gnome-shell instead of compiz, and uses gnome-tweak-tool (or the TUI gsettings tool) to change
settings.
A standard set of menus, applications
(such as a panel), icons (e.g., a trash can icon), and services
such as support for drag-and-drop, a clipboard, virtual desktops, and GUI
development libraries, are considered a desktop environment.
Common ones are CDE (Unix), GNOME and KDE (Kool Desktop
Environment) for Linux.
Gnome has lots of corporate support and is the default for
most systems, including Red Hat, Ubuntu, and Solaris.
Gnome 3 is not universally accepted; may prefer Gnome 2
user interface. A group of developers have created Mate, a continuation of Gnome 2. Another
popular alternative, first seen with Linux Mint, is Cinnamon.
Many different WMs are compatible with
these. A popular “lightweight” alternative is Xfce. (Some Unixes such as
OpenSolaris and Solaris 11 now use Gnome and not CDE.) A system can install
several of these and each user can use a different one. A newer one named
Budgie (based on Gnome) is designed to be extremely easy to use.
The X server itself must be
configured to know: the type of mouse used, the type of monitor, type of
video card (including how much video RAM:
#pels * bytes/pel <= videoRAM, 8 bits per byte),
location of fonts that X clients can use, which video modes will be
supported, and other information. Modern X servers generally probe your hardware
and automatically generate a config file (not saved to disk by default). If
the file /etc/X11/xorg.conf
(old: XF86Config) is there that will be used. It can be edited
by hand but usually some tool can be used to generate it.
One important setting is the dots
per inch (dpi) of the monitor. (This is often measured as the space
between pixels, or dot pitch.) This can vary from 72 DPI for older Macs
and CRTs, to 96 DPI for Windows (actually
Windows uses 72 DPI as well, but told software 96, resulting in text that
was 1/3 larger; a 12-point font used 16 pixels on Windows), to 326 DPI for
Apple’s Retna display. Many bitmapped fonts assume 72 DPI, and will
look much smaller if the DPI is set higher.
Xorg provides
three ways to configure the X server manually:
1. xorgcfg — A menu based
configuration utility that can be run either with a GUI or from the text
console (using “-textmode”
option).
2. Xorg (or X, the X server) — creates a skeleton configuration
file. As root run: Xorg (or X) -configure.
The resulting configuration file will be called ~/xorg.conf.new,
which will overwrite an existing one if it is there. You edit this file by
hand to suit your needs; all available driver options are already listed
(mostly commented out), with comments to help you out.
3. xorgconfig — an interactive script
which asks you questions about your hardware and creates a configuration file
for you. This command doesn’t probe your hardware; you will have to know the
values. Google and dmesg are
your friends here.
xvidtune can be used to tweak the xorg.conf file settings interactively, but may not work and can be
dangerous.
An X client needs to know where to send
its output (i.e., where to display its windows), the size, location, and other
attributes of the windows. Most of this information can be supplied on the X
client’s command line using a standard -geometry
option. Demo: [kx]calc -geometry [widthxheight]+x+y (Can use - instead of + to provide X and Y from
the right and bottom.)
See man X
for details and an overview. See also man pages for: Xserver, X.Org, XConsortium, xhost,
xauth, xset, xdm, xorgcfg,
xvidtune, xorg.conf, xrandr --verbose
(shows X settings), xdspyinfo
(shows server capabilities, extensions, ...), xv,
xvinfo, and glxinfo (3D support), xrestop (monitor resources, like top), xrdb (manage .Xresources,
which is a legacy text file “registry” to store X app settings), xprop, xwininfo.
The X client can be told which display
on which computer to use from the cmd line too (-display), but most commonly the DISPLAY environment variable is
set for this info. The full value is “host:display.monitor”
but only the display number is required. (To use the only display on
the local system set DISPLAY
to ":0".)
To allow remote X clients to popup
windows on your desktop, use xhost
to grant permission. This basic form of security is so weak that a much better
solution is to use SSH to tunnel the X window session, so remote X
clients think they are displaying to a local X server.
Demo: ssh -X yborstudent /usr/bin/xcalc,xbiff,xeyes,xclock}
To start up the X server: startx.
To switch modes (if more than one configured): CONTROL+ALT+KeypadMinus (or plus). (Demo, showing
virtual desktop.)
To stop it type: CONTROL+ALT+BACKSPACE. (If this
feature is enabled.)
The key combination Ctrl+Alt+Backspace to kill the X server has been disabled by default in current (2009) Xorg. Actually
this is enabled, but they key sequence is not mapped by default. There are
several ways to restore the mapping; the easiest is probably to run this
command:
setxkbmap -option
"terminate:ctrl_alt_bksp"
You can also change this by adding the following section to
your xorg.conf file, or by settings for your window manager (KDE or
Gnome). If one does not exist, you can create it manually at /etc/X11/xorg.conf using a text editor, and Xorg will use that file instead
of its automatic configuration:
Section
"ServerFlags"
Option "DontZap" "false"
EndSection
On GNOME2, go to System -> Preferences -> Keyboard
-> Layouts -> Options [button] -> Key -> sequence to kill the X
server [expand with triangle on left]. Then check the “Ctrl + Alt +
Backspace” option.
On KDE4, go to Kickoff (the “Start” or “f”
button to show menus) -> Computer- > System Settings which
will open up the System Settings window. Click on “Input Devices”
(in the “Hardware” group). Click on the “Keyboard” tab (should
be already selected). (From here, you can enable NumLock to start on
automatically too.) Next, click on the “Advanced” tab. Click on
the checkbox “Configure keyboard options” to enable them. Then click on
the arrow to expand the entry for “Key sequence to kill the X server”. Check
the “Control + Alt + Backspace” item (the only one) to enable it, and
then click Apply.
Unix and Linux usually are configured
with several virtual consoles. Usually X runs on console 7
or console 1, and several text-only (or other X) consoles are enabled. To
switch between them use CONTROL+ALT+fn1-7. (F1 console is often used as
system console, so that’s where console messages will appear. Note that during
an install, different types of messages are sent to different consoles; if
something isn’t working, examine all consoles for messages.)
Note that when running on VMware, you can’t just type
control+alt+someKey. You must also hold down the Windows key (“ ”)
at the same time. For VirtualBox, use the “host” key instead of control+alt.
By default, this is the right control key.
”)
at the same time. For VirtualBox, use the “host” key instead of control+alt.
By default, this is the right control key.
To enable a GUI login requires running XDM (or some equivalent GDM, KDM,
or SDDM) at boot time. In this
case, if you use CTL+ALT+BS to
stop X, it will automatically restart (if this feature is enabled; usually, it
isn’t). XDM is normally started as a service in some run-level or other, but
on some BSD (e.g., FreeBSD) systems this may controlled by the /etc/ttys file instead (it depends on
the SA’s preference).
To create a larger than the screen size
virtual desktop (up to video RAM limit):
Virtual 1280 1024 Horizontal x vertical
Viewport
0 0 Upper left coords of initial screen
Other
Changes:
echo 'DISPLAYMANAGER="KDE" # which XDM to use
DESKTOP="KDE"#dflt desktop' >/etc/sysconfig/desktop
To
switch from The GDM to KDM, setting
the desktop file won’t work anymore. With systemd,
you need to run these two commands:
#
systemctl disable gdm # or whatever DM is running now
# systemctl enable kdm
To
enable auto-login (for
your physically secure home or office PC), use the KDE GUI tool for that, or
for GDM edit /etc/gdm/custom.conf with either:
[daemon]
AutomaticLoginEnable=true
AutomaticLogin=userName
Or:
[daemon]
TimedLoginEnable=true
TimedLogin=userName
TimedLoginDelay=1
To configure ALT+Tab to cycle
through all open windows, for KDE you right=-click on any window’s title bar
and select “configure window behavior...”. Click on the “Task Switcher” tab,
and change the “List Windows” setting to “All Desktops”. For Gnome you need to
use ccsm (or maybe sabayon); for CDE use dtstyle.
To allow root to login with KDM,
change AllowRootLogin=false to true in the kdmrc file (location depends on your system). There is a
similar file for GDM (/etc/gdm/custom.conf
on Fedora). PAM is also used to control this for some XDMs (e.g., modern Gnome).
You need to comment out the following line (if it exists) in the files /etc/pam.d/[kgx]dm*:
auth required pam_succeed_if.so user != root quiet
You will also need to set root’s
password on Ubuntu; accounts with no password set are locked.
Demo and discuss:
·
Customizing KDE (virtual desktops) and Gnome (/etc/xdg/*, ~/.config, *.desktop),
Sabayon for Gnome, and Tweak-tool for other settings
for Ubuntu based distros (such as Mint). (See dconf,
below.)
Individual users can override the system default menus,
desktop icons, and auto-run (or auto-start) applications. For
Gnome the system defaults are in /etc/xdg and user defaults in ~/.config. There are command line tools (xdg*) to control icons and menus, but over-riding auto-start
apps that way doesn’t seem to work. Use gnome-session-properties to
configure programs to start automatically. You can also create a desktop file
or copy one from /usr/share/applications to ~/.config/autostart in your home
directory. (To prevent a system/standard app from auto-starting, rename or
remove it from /etc/xdg, or copy it into ~/.config/autostart/ (you make
have to create that), then edit or add the line “X-GNOME-Autostart-enabled=false”.)
KDE works similarly (uses the same *.desktop files) but the files are in /usr/share/{app*,kde*} (system-wide) and ~/.kde (per user).
·
Sticky icons & windows (“keep on all desktops”),
moving windows between desktops
·
using the mouse for copy (left button) and paste (middle button)
·
iconizing, docking (application icon on the system
tray part of the panel)
·
adjusting the panel and menus
·
Using KEdit,
xterm, notify-send, xmessage, or osd_cat.
·
Managing removable media (mtools, mount,
auto-mount, icons, PAM)
·
Demo Add an icon. (sabayon)
·
Gnome includes GIO, a user-space filesystem that allows simple
access to remote and removable files. (KDE has a similar facility, KIO.) To
allow older software that doesn’t use the GIO DLL, the user-space GVFS tools (“gvfs-*”) and daemons will automatically
mount (as root) some of the remote files, under ~/.gvfs.
Occasionally this causes problems when you try to umount /home,
or run find, or a backup. The
auto-mounting comes from Nautilus (window manager for Gnome), and that can be
configured not to automount anything:
gconftool --type Boolean --set \
/apps/nautilus/preferences/media_automount false
To stop gvfs-fuse-daemon from
running at all (and thus disabling some of these features, and possibly causes
problems with Nautilus and other Gnome software), you can try:
echo export GVFS_DISABLE_FUSE=1 \
>/etc/X11/xinit/xinitrc.d/00-gvfs-disable-fuse.sh
(It would be too late to set this environment variable in a login
script.)
Per-application configurations and settings are managed by dconf or the older version of
that, gconf. Originally part of
Gnome, this is used by KDE too. Use the dconf-editor
(or gconftool-2) tool to
customize your policy, ~/.config/dconf/user
(not a text file!).
Xvfb is an X server that can run
on machines with no display hardware and no physical input devices. (So is xserver-xorg-video-dummy.)
It emulates a dumb framebuffer using virtual memory. The main use of
this was intended to be application testing without the need for real hardware
that supports desired features. Other uses for Xvfb
include testing clients against unusual depths and screen configurations, doing
batch processing with Xvfb as a
background rendering engine, load testing, and providing an unobtrusive way to
run applications that don’t really need an X server but insist on having one
anyway. See also xwd and xwud for screen shots. Using such a
dummy X server allows one to run GUI programs via cron (assuming you don’t care
to see the GUI window, of course.)
Example: To install Perl’s Tk.pm module without running X, boot
to run-level 3 and login as root. Then:
# Xvfb :0 & cpan Tk; \
kill `pidof Xvfb`
Fedy is a nice GUI tool for Fedora to
easily install packages not found in the more common repos (for example, Adobe
Flash), and for making various tweaks to Gnome. Install Fedy using the
following command:
$
su -c "curl \
https://satya164.github.io/fedy/fedy-installer \
-o fedy-installer && chmod +x fedy-installer && \
./fedy-installer"
You should also install gnome-tweak-tool
from the repos, and then add Gnome extensions from the Gnome Extensions site.
Understanding
and Managing Fonts
Unix systems have traditionally weak
support for fonts. After all, most servers lack any sort of GUI! One thing
you can do is to change the font used for the system console (or virtual
consoles) on Linux using the setfont
command. The default font to use is configured someplace; on Fedora look
for SYSFONT in /etc/sysconfig/i18n. For other
systems (e.g., BSD, Debian), grep rc.conf
for “font”. Console fonts are
in a special format, and the ones on your system are installed one place or
another; try find / -type d -name \*font\*. On Fedora, they’re in /lib64/kbd/consolefonts. (The font
files used should be in the root partition, or they can’t be used after
mounting.)
What You
Should Know About Computer Fonts
[Adapted from: “A Font Primer for
Linux”, by Nathan Willis, posted at www.linux.com/archive/feature/39513
on 10/12/04.]
The earliest digital fonts were nothing
but dots: monochrome bitmaps. Every character was handmade for each
available point size. That ensured they would be clear and legible at those
point sizes, but forcing interpolation if you wanted a size that the
font foundry (a foundry is a company that produces fonts) did not
supply. This leaves jagged edges when increasing letters in size and
indistinct blobs when decreasing. One solution was to supply each font in many
sizes. This includes font variations such as bold or italics; each is a
different “font”.
Another approach is possible though:
have fonts that defined their characters with smooth curves. These are called “outline”
fonts. Such fonts can be drawn at any size. (Consider a slash “/”: the font
can say the slash is y=4x, and
you just compute each <x,y>
point to draw the slash, for as many points as desired.) Such outline font
files are fairly small (much smaller than a whole set of font files for a
bit-mapped font at many sizes). In addition, outline fonts can be manipulated
to produce variations such as bold or slanted.
By the late 1980s the two major desktop
system vendors, Apple and Microsoft, as well as software maker and foundry Adobe
(who led the desktop publishing revolution) all agreed to use outline fonts. Adobe
was pushing its PostScript technology for printers and tried to get the systems
vendors to license the new, scalable “Type 1” font technology it had designed
to go with it. But Apple and Microsoft were wary of the idea, because although
PostScript was an open standard, “Type 1” was closed and proprietary.
Apple and Microsoft made a deal: Apple
would produce an open font for PostScript, MS would include a PostScript
interpreter with Windows, and they would share.
As usual, MS produced a proprietary, incompatible
PostScript system called “TrueImage”. Nobody ever used it since Adobe
PostScript was freely available anyway. But the Apple font technology caught
on, and evolved into “TrueType” fonts. Besides TrueType and PS Type 1 fonts,
Adobe has released other outline font types (e.g., “Type 3”), but they are not
as popular.
The conflicting font types were an annoyance
since you had to have (and pay the licenses for) multiple font rendering
libraries on your system. Fortunately, in 1996 Adobe introduced OpenType, a
new format that can encapsulate both Type 1 and TrueType fonts, and
introduces some newer features as well. The current versions of Windows, Mac
OS X, and Linux include support for OpenType.
The X window system originally only
supported bit-mapped fonts. The console drivers still only use bit-mapped
fonts. Today X window does use outline fonts, but still ships with some of the
older bit-mapped fonts to support legacy applications. These are packaged in a
special format.
Table
showing the file extensions for some common font types
|
Font Format
|
Vendor
|
File
Type
|
|
TrueType
|
Various foundries
|
.ttf
|
|
PostScript Type1 (ASCII)
|
Adobe and various foundries
|
.pfa
|
|
PostScript Type1 (binary)
|
Adobe and various foundries
|
.pfb
|
|
PostScript Type 3
|
Adobe and various foundries
|
.ps
|
|
Speedo
|
Bitstream
|
.spd
|
|
Portable Compiled Format
(bitmapped)
|
MIT
|
.pcf
|
|
Bitmap Distribution Format
|
Adobe
|
.bdf
|
There is a free version of standard (“core”) Microsoft
Windows (TrueType) fonts you can install called “msttcorefonts”. You may find a package you can install via yum/dnf or
apt, or you may have to download the font.exe file from sourceforge.net and manually extract and then install the fonts. A Google
search should turn up directions for doing this.
Modern X Servers:
FreeType
XFree86 v4 introduced a new extension
to the X protocol called Xft to enable the use of scalable fonts. Xft
uses the FreeType library, an open source scalable font renderer that supports
Type 1, TrueType, and OpenType fonts, in addition to a number of less common
formats. FreeType is modular and extensible in design with a separate
“font driver” for each font type. FreeType is now used for all *nix systems
today (I think).
When an application needs to write text to the display it
calls on Xft, passing it the string and the font face that it requires. Xft
must then determine which specific font is required if more than one matched,
as in the case where a scalable and bitmapped version of the same font are
available. It then sends the character codes it needs to FreeType which finds
the appropriate glyph in the font file, scales it, and rasterizes it.
FreeType hands back to Xft an 8-bit grayscale rendering of
the requested glyph, regardless of what colors might be of interest
to the application. It’s up to the application to transform the grayscale
glyph into another color (or bit-depth) or composite it onto some interesting
surface.
Most X11 applications today are written with higher-level
toolkits like GTK or Qt, which supply the
transformative power that FreeType itself does not provide. So if you use the
right toolkit, Xft and FreeType support is automatic and you gain additional
font-handling capabilities as well. Qt is currently (2011) being developed and
adopted very rapidly, leaving GTK behind.
FreeType has one problem with outline
fonts. Apple holds patents on the “hinting” system that tweaks the
TrueType fonts to make the look better at various sizes. (As Adobe does for
Type 1 fonts.) So the FreeType system ignores any hinting information supplied
with the fonts and attempts to tweak the fonts with its own hinting. This
rarely looks as good but it is the best that can be done.
Managing
Fonts:
The short answer to “how do I install a font?” is to
download one and put the font file in the directory ~/.fonts.
Fontconfig (see www.freedesktop.org/wiki/Software/fontconfig)
is a library to simplify finding and accessing the fonts on a given system.
Fontconfig can auto-discover the fonts installed on your computer,
automatically find the correct font for a given language or character set, and let
you configure your own personal font preferences (including substitutions) with
XML configuration files.
Besides a number of GUI front-ends,
fontconfig includes some command line tools to manage and view font
information: fc-cache, fc-list, and fc-match. (A new replacement for
these, fontconfig, is due in
Fedora 17.)
Fontconfig has system-wide
configuration files in /etc/fonts,
which says (among other things) where the font files are on the system, which
fonts contain which Unicode glyphs, and other information.
To install other fonts system-wide, put the font file(s) in
a new directory and add an /etc/fonts/local.conf file which
referenced that new directory. Restart X, and check with fc-list that the fonts are available.
There is also a per-user configuration
file ~/.font.conf.
You can edit that file to make the system substitute one font for another. The
default configuration will auto-discover any outline font files placed in the
directory ~/.fonts. This font.conf file will block the font
Arial and replace it with Liberation Sans:
<?xml
version="1.0"?>
<!DOCTYPE
fontconfig SYSTEM "fonts.dtd">
<fontconfig><selectfont><rejectfont><pattern>
<patelt
name="family"><string>Arial</string></patelt>
</pattern></rejectfont></selectfont>
<alias>
<family>Arial</family>
<prefer><family>Liberation Sans</family></prefer>
</alias></fontconfig>
You can paste in additional sections of
the file to mandate other font swaps, and this trick works just as well on
Linux as on OpenSolaris.
www.x.org/X11R6.8.2/doc/fonts.html shows how to
add fonts for some other Unix systems.
Other font tools include fntsample, which can show the Unicode
coverage of a font.
Managing Fonts
on Legacy Unix and Linux Systems
There was (is) an older and a newer X
font system as part of the X server. Some apps used the very old one, more
modern (but still considered legacy today) apps use the newer one. Sadly there
are lots of such systems still in use and you may need to manage one someday.
The old X font system only could handle
bit-mapped fonts in special X formatted font files. All X fonts had logical
font names, very long names that contained 14 fields listing all the
font properties in the format, in a pre-defined location:
-foundry-family-weight-slant-stdwidth-style-pixelSize-pointSize-\
Xresolution-Yresolution-spacing-averageWidth-registry-encoding
Example:
-adobe-utopia-bold-r-normal--12-120-75-75-p-70-iso8859-1
The idea of these is that you could find
a font with specific properties by using ls
and wildcards: ls -*-*-bold-*-*-*-12-*-*-*-*-*-*-*
In addition to those fonts, the newer X
system can find font files directly if they are listed on the server’s font
path. The newer system uses the config files in the /etc/X11/fontpath.d directory to
locate fonts.
Modern bit-mapped fonts have much shorter
file names (and you can define your own aliases for font names).
However it is time-consuming to determine the font properties that the logical
name provides. So that data must be computed in advanced and cached in files
(and RAM).
With the modern (but still legacy) system,
each directory containing fonts must contain the file fonts.dir which maps the file
names to the X logical font names and provides a handy index of the fonts in
the directory for X to use. These bitmapped fonts use a short name with the “.pcf” extension. Use mkfontdir to generate the fonts.dir files. Use xset fp+ directory
to update the X server’s font path, and xset fp rehash to rebuild the X server’s font cache.
Using the X
Font Server (Legacy X Servers Only)
These older X servers only understand
bitmapped fonts. But some come with an X font Server (or “XFS”). The X
server is configured to use bit-mapped fonts, XFS, or a combination. Besides the
modern bit-mapped X fonts (the short filenames with “.pcf” extension) XFS can use TrueType fonts
(with the extension “.ttf”) or PostScript
fonts (with the extensions “.pfa”
or “.pfb”, plus an additional
font metrics file “.afm”). Some
other font types may be supported as well.
The X font server has a different set
of utilities: to manage font files, to generate font directory index files, and
to update the XFS font cache. Use chkfontpath
to configure font directories. (For systems lacking this command you need to
edit the font server’s config file.)
You build an index of fonts for each
font directory. If the directory contains Type1 fonts run mkfontscale which creates the
index file fonts.scale.
If the directory contains any TrueType fonts run ttmkfdir which creates the same file.
Because these commands overwrite any
previous fonts.scale file you can’t
put TrueType and Type1 fonts in the same directory. However it is safe to
include bit-mapped fonts in these directories.
The fonts.scale
file and any bit-mapped fonts in the directory are used to create the fonts.dir font index file by
running mkfontdir command
on it.
Finally you must kick the font server
(or X) to make it refresh its cached list of available fonts, by re-examining
all the indexes in all the directories listed on the font path. This is done
by sending SIGHUP signal (via kill)
to the X font server (or X).
Run xset
q to see which
directories are listed on X’s fontpath, chkfontpath to see the xfs
fontpath. To see which fonts are available use xlsfonts. The X font server uses fslsfonts to show just the fonts
known to the font server (/etc/X11/[x]fs/config).
To see the characters in a given font use the xfd
command.
To make fonts useable with both older and newer font
systems, you need to run both sets of commands. For example, to make the TeX
OpenType files available everywhere:
$ mkdir ~/.fonts
$ mkdir ~/.fonts/OTF
$ for f in $(find /path/to/your/texlive/texmf-dist/fonts/opentype/public/ \
-maxdepth 1 -mindepth 1); do ln -s $f ~/.fonts/OTF/; done
# fc-cache ~user/.fonts
# mkfontscale ~user/.fonts/OT
# mkfontdir ~user/.fonts/OTF
Remote
desktop control software
VNC (Virtual Network
Computing) software makes it possible to view and fully-interact with one
computer from any other computer or mobile device anywhere on the Internet.
VNC software is cross-platform, allowing remote control between different types
of computer. There is even a Java viewer, so that any desktop can be
controlled remotely from within a browser without having to install software.
(http://www.realvnc.com/) There
are different vendors of VNC (TigerVNC, RealVNC, TightVNC, ...) and they
don’t all work the same. Some alternatives such as rdesktop will also work with Windows Terminal
services (now called Remote Desktop Connection or RDC). Also PC Anywhere, DS
View. See Wikipedia “Remote Desktop Software” for comparisons.
Adding to
Gnome’s Context Menu
Here’s also a way to automate the
process where you mount your USB flash drive without having to type anything at
a command line. (If you have a modern 2.6 or newer Linux kernel and udev
and hotplug support, this shouldn’t be needed at all.)
In Gnome, when you right-click anywhere
on the desktop one of the menu choices you have is Scripts, which is a
quick and easy way to execute shell scripts without having to open a terminal
window.
All you need to do is add a script to
the right folder. By default, there are no scripts in the folder that the
Scripts menu points to but there is an option to open that folder. Once in the
folder create a new text file and open it in your favorite text editor to write
the following script:
#!/bin/bash
modprobe usb-storage
cd /mnt
mount usbstick
We run the modprobe command just to make sure that the usb-storage module is loaded. If it’s
already loaded, there’s no harm done, and if it wasn’t already loaded, now it
is. [I bet all that is needed is the mount
cmd once the appropriate mount point exists and fstab
entry is created.]
Save the script as something like “mount usbstick” and copy it into the ~/.gnome2/nautilus-scripts directory.
Set the script as executable by the
appropriate groups/users.
Now when you right-click on the desktop
and go down to the Scripts menu choice, in the Scripts sub-menu you should see
your mount usbstick script.
If you have your USB flash drive
mounted as a volume, you can right-click on it and the bottom menu choice
should be Unmount Volume. Use
this to unmount the volume before physically removing the USB flash drive.
The next time you insert the flash
drive into an available USB port, right-click on the desktop, go into the
Scripts sub-menu, and execute your mount
usbstick script. The drive icon
for your flash drive should appear on your desktop.
CDE
Configuration
On a Unix system you will need to
configure CDE. For some reason CDE commands are prefixed with “dt”, as in dtterm for xterm, dtwn
(the CDE standard window manager), and dtfile
for a GUI file manager. The CDE equivalent of XDM is dtlogin. Dtlogin
works in a client-server mode; dtlogin
waits for an X device to connect by way of an XDMCP request, and then communicates
with your local X server by setting DISPLAY
on the server machine (i.e., the X programs all run on the remote server but
send their GUI to your local X server) and running dtgreet (login).
The shipped default configuration is in
/usr/dt, you shouldn’t edit this
as updates will over-write it. The system-wide defaults are in /etc/dt, and a user can over-ride that
with ~/.dt. All three locations
share a common directory structure.
NumLock
In Linux 3.5 and newer, the kernel
detects and uses the BIOS setting for NUMLOCK. For older Linux, try: yum/dnf
install numlockx (from: ktown.kde.org/~seli/numlockx/).
For the non-GUI consoles, a “setleds”
can be used to turn NumLock on or off. You can use setleds in some boot up script, say /etc/rc.d/rc.local, to turn on NumLock
by:
INITTY=/dev/tty[1-8]
for tty in $INITTY; do
setleds -D +num < $tty
done
Configuring
X Applications
GConf
is a system used by GNOME (and KDE) for storing configuration settings (a.k.a. user
preferences) for the desktop and applications. This configuration data is
not stored in standard dot-files, but in a database of XML files under ~/.gconf. (A kind of registry...yuck!)
The (per user) daemon GConfd
watches out for changes to these files and applies the new settings to (GConf-aware)
applications immediately. The GUI config tools that use GConf require users to
press an “OK” or “Apply” button to make changes come into effect.
There are a number of tools to manage GConf: the gconf-editor GUI tool and the gconftool-2 command line tool are
commonly used. When using GNOME2, many apps store their settings with GConf.
GConf has been replaced by GSettings in Gnome 3.0. GSettings
supports multiple backends, and the default in Fedora is dconf. The gsettings command line
utility is the equivalent of gconftool-2 in previous releases.
The dconf-editor provides a graphical editor for managing settings similar
to gconf-editor in previous releases.
GConf is actually built on top of “DConf”,
which does all the work. See the Sys Admin Guide to
dconf for more.
Many X programs (especially older ones
that don’t ship with KDE, Gnome, or CDE) can be configured with default window
locations and sizes, colors, font choices, and more by adding entries to your ~/.Xresources file. Each line in
this file has the form: programName*resourceName: value. Here’s
a sample:
xterm*background:
Black
xterm*foreground: White
xterm*reverseVideo: false
XTerm*Font: 6x10
This file’s settings are merged with
the system-wide Xresources file using the xrdb
command in the X startup script (or XM=DM’s session startup script). See man
page for X(7) for details.
The keys on your keyboard can be mapped
to various (Unicode) characters by creating ~/.Xmodmap,
read with the xmodmap
command. This can be useful for assigning values to special keys on a
keyboard. Keys are also mapped with loadkeys(1)
for non-GUI (tty driver) consoles. (See also the setxkbmap command.)
To adjust Firefox (Iceweasel) so that
it launches Thunderbird instead of evolution, xfce 4.x has default application
chooser use that. The other way is using Firefox’s own app chooser: about:config, then Network.protocol-handler.app.protocol.
For some RH-based distros Gnome is in charge of this setting instead. The way
to fix it is to launch gnome-control-center,
and choose “Preferred Applications”, and adjust as needed.
You can adjust these manually too. In $HOME/.thunderbird/*/prefs.js put the
lines:
user_pref("network.protocol-handler.app.http","firefox");
user_pref("network.protocol-handler.app.https","firefox");
user_pref("network.protocol-handler.app.ftp","firefox");'
In $HOME/.mozilla/firefox/*/prefs.js
put the line:
user_pref("network.protocol-handler.app.mailto",
"thunderbird");'
(or, more comfortably, edit it in
Firefox with “about:config”.)
Of course “firefox” and “thunderbird” need to be in your PATH.
FYI: Popular CD ripping tools: grip, abcde,
cdparanoia.
Because of patent issues, Fedora and other distros don’t
ship with a codec for MP3 or other such formats. But Fluendo offers an MP3
decoder that follows all legal requirements set by the patent holder (www.fluendo.com). Two alternatives for Abode’s Flash are swfdec or gnash, available from yum repos.
See FedoraProject.org/wiki/Multimedia for more.
Installing
Nvidia Drivers on a Fedora System
First make sure you have added both
rpmfusion repositories to yum. Then for GeForce 6, 7, 8, 9 & 200 series
cards:
yum
install kmod-nvidia xorg-x11-drv-nvidia-libs.i686
or if using a PAE kernel: yum install kmod-nvidia-PAE
For the older GeForce FX cards: yum install \
kmod-nvidia-173xx xorg-x11-drv-nvidia-173xx-libs.i686
or if using a PAE kernel: yum install kmod-nvidia-173xx-PAE
Next you need to edit either grub.conf or /etc/modprobe.d/blacklist.conf to ensure the default
Nouveau driver won’t be used. You will need to rebuild the initial ram disk
after this change. To edit grub.conf:
sed
-i '/root=/s|$| rdblacklist=nouveau|' \
/boot/grub/grub.conf
To edit /etc/modprobe.d/blacklist.conf:
#
Video drivers
blacklist nouveau
Then
regenerate the initial RAM disk:
mv
/boot/initramfs-$(uname -r).img \
/boot/initramfs-$(uname -r)-nouveau.img
dracut /boot/initramfs-$(uname -r).img $(uname -r)
Lastly,
due to the way the Nvidia drivers are written you need to enable allow_execstack so SE Linux doesn’t prevent the driver loading:
setsebool
-P allow_execstack on
You may also need to update xorg.conf (especially with compiz),
and use the commands glxinfo, rhpxl, system-config-dispaly, and
nvidia-settings. For details, see: forums.fedoraforum.org/showthread.php?t=204752.
Lecture 8 — Configuration
Management and Patch Management
In the real world, you seldom if ever
set up a server (or workstation) in isolation. Inevitably, there are many
services involved and these are usually hosted on different servers: a web
server farm, DHCP, printing, LDAP (single sign-on), DNS, NFS, Samba, NIS, etc.
In this situation, there can be many
dependencies between servers, so that changing the configuration of any one of
them may impact others. Here are a few ways these dependencies can hurt the
unwary:
·
Decommissioning a server that may have been the DHCP server for some
small group within your organization; those affected hosts will fail to reboot.
·
Can the new versions of applications and patches be installed on
one machine from another? What if one host has higher security requirements
than the host the software is coming from?
·
How can you be certain every host in a cluster/grid is running
the required (new) version of some library?
·
How can you be certain all hosts have current anti-virus
signatures installed?
These problems can become especially
acute in a de-centralized environment, where some “uppity” SA over-rides the
standard configuration with local changes.
Every organization has information
stored about its IT infrastructure, and this information must be kept
up-to-date as changes are made to any configurable item (or CI). This
data is consulted for dependency information when planning any changes.
Every industry has a
slightly different definition of configuration management. The ISO definition
(ISO 10007:2003, Quality management systems - Guidelines for configuration
management) is typically obscure: “Configuration management is a management
activity that applies technical and administrative direction over the life
cycle of a product, its configuration items, and related product configuration
information.” What that really means is keeping track of all the tasks and
settings needed to bring a “bare metal” computer with just a running, default
OS, to a fully operational state.
Configuration
management (“CM”) is the task of juggling the configuration of all servers,
routers, switches, firewalls, PCs, etc., and all application configurations on
them.
The SA must check that
changes to any configuration information (any “CIs”) have been recorded
correctly, including any dependencies that may have changed, and continuously monitor
the status of all IT components. CM is sometimes (and I think incorrectly) called
asset management or other names.
CM starts with policy.
If a system doesn’t behave as it should (according to policy), then you have a
problem that needs to be detected, understood, and fixed.
[Wikipedia on ERP, 3/09] Enterprise resource
planning (ERP) is an enterprise-wide information system designed to coordinate
all the resources, information, and activities needed to complete business
processes. An ERP system is based on a common database and a modular software
design. The common database can allow every department of a business to store
and retrieve information in real-time. The information should be reliable,
accessible, and easily shared. The modular software design should mean a
business could select the modules they need, mix and match modules from
different vendors, or add new modules of their own.
Using standard ERP modules that implement “best practices”
for CM can reduce risk and ease compliance with regulations such as IFRS (International
Financial Reporting Standards), Sarbanes-Oxley and Basel II.
CM includes patching
systems and applications, throughout the enterprise. In larger organizations,
this requires some help (including policies, tools, and servers) or the task is
impossible. One part of CM is Software CM or SCM, which
typically involves a revision (or version) control system such as RCS or CVS
(discussed later). CM is related to change management (discussed
below).
A number of standards and
guides for CM/SCM are available including: IEEE Std. 1042-1987 (Guide to
Software Configuration Management), MIL-HDBK-61A 7 February 2001 (Configuration
Management Guidance), ISO-10007 Quality management (Guidelines for
Configuration Management), and others.
There are often legal
requirements for doing some sort of CM including compliance with various
regulations (SOX, HIPAA, etc.). The penalties for management may be severe;
for the SA you may find yourself out of a job.
The phrase configuration management is sometimes
used to refer to the hardware selections made when upgrading or purchasing new
systems. This is also called provisioning and asset management.
An SA must keep an inventory of all hardware assets, including where it
is, make/model, when and where purchased, serial numbers (and barcode numbers),
and support contract information. Software assets can be inventoried using the
same system. Consider what happened fall 2008 in the DM lab, when the wrong
hardware was purchased and CTS-2301C students couldn’t use their disk drives in
the lab computers! This is asset management.
Provisioning is the
task of configuring servers (including virtual servers or containers) and other
equipment from scratch.
The basic choices to be made when provisioning a new server
include: the type of enclosure (rack mount or enclosure, and the size and
type), the power and cooling requirements, noise and vibration damping, the
type of motherboard and bus, the number of CPUs (or cores), the amount of RAM, drives
(disks, CDs, DVDs, if any), and the I/O (console ports, printer ports, network)
needed.
Even using a single vendor, the possible configurations of
a single server are staggering, often more
than 10,000. And not every combination will work! Most vendors have (and some
provide to customers) a configuration or provisioning tool they use, to make a
workable configuration that will meet your needs. Such tools need frequent
updating!
In addition to hardware provisioning, you can expand the
definition of server provisioning to include everything to make a server ready
to use, including:
·
selecting a server from a physical
server pool or selecting a hypervisor;
·
selecting an image to install (for a
physical server) or an image to run (for a virtual server);
·
installing and booting the image;
·
assigning and configuring resources (IP
address, disk space, etc.);
·
installing and configuring middleware
(e.g., DBMS); and
·
installing and configuring
applications.
When planning or upgrading a SOHO (i.e.,
small to medium organizations), money is often a critical factor. While new
hires rarely have to design large business infrastructures, it is not uncommon
for new hires at SOHOs to have to “fix” a faulty infrastructure or grow a SOHO
into a mid-size one. There are some general guidelines you can follow:
·
Use commodity hardware for client-side systems. Keep spare parts
handy. Keep data (such as user’s home directories) on a server. This will
keep recovery time as short as possible in the event of a PC failure. Client
PC failures rarely cause highly visible incidents (the exception being the
CEO’s desktop). Maintain an up-to-date disk image file, in case you need to
install a new PC quickly.
·
Running cables is expensive, but generally they charge per drop
and not per foot. So it is often cheap to pull double cables which has
potential advantages. If one fails you have a spare. If you need more bandwidth,
you can use bonding. If another computer is installed in that office, you have
the outlet for it.
·
In a medium to large organization, you may have several servers,
firewalls, network monitors, and routers. If the network fails you lose
everything, so at least two “core” switches are used for redundancy, even
though these are very expensive. If available, these switches should have redundant
power supplies (or darn good UPSes). Core switches require high speed so use
“L3” (or “multi-layer”) switching. This means they are working as (a pair of
redundant) routers. They should use the Virtual Router Redundancy Protocol
(VRRP) or Hot Standby Router Protocol (HSRP).
These two protocols cause routers and core switches to
share a virtual IP that your host systems use as their default gateway. When
the primary one goes down, the other very quickly begins responding to the
virtual gateway IP, ensuring that your hosts are not aware of the failure.
·
Depending on the size of the organization you may only need a
single “access” switch to connect all of the client PCs to the core switches
(or to the one and only router). More commonly, you’ll need a few, if the
original one had only 4 or 8 ports and you need more, or if the organization is
spread out over an area too large to cover with a single data link (LAN). A 1U
fixed configuration switch is good enough for an access switch, as long as it
contains at least two ports of the correct speed for uplinks to each of the
core switches. While these don’t need redundant power supplies like the core
switches, you will need an “enterprise grade” switch that includes features
such as VLAN management, SPAN port and other management features.
·
If your organization is large enough to host its own services
(database, web, mail, ...) then redundancy is going to be important. You should
use a cluster or a simple hardware load balancer. This is probably too much
for a SOHO; a decent hardware load balancer will cost between $4K and $10K, the
same as for a high-quality server. Another solution is to outsource backup
servers for vital servers. For example, you can pay a small monthly fee to
some datacenter and they will be your primary email server, forwarding email to
your internal mail server. They have high uptime SLAs, and usually offer spam
and virus filtering. (This is called mail bagging.)
The above discussion didn’t mention
monitoring. You don’t do CM once then forget it. You bring systems in line
with your policy, audit the systems to make sure, and monitor them over time,
correcting any problems that inevitably crop up.
The most basic CM method is to keep
a system journal of all your steps, so you can reproduce them. A step-up
from that is to keep your notes on a wiki. However, this method doesn’t scale beyond
two or three hosts.
A major improvement is to automate some
or all of the manual steps. That can be done by finding simple tools (including
GUI ones) that do most of the work for you. Usually however, even the simplest
IT infrastructure will need custom steps, and no existing tool can automate all
your processes. Instead, scripts (shell, Perl, Python, Ruby, or whatever) are
used to run a series of non-GUI tools to complete processes such as adding a
new customer, employee, or deploying a new web (or other) server.
Most SAs use some collection of tools
to manage some part of system configuration: webmin, command-line tools,
central software repositories, etc. However, there is no unified approach
taken in the usual case, to configure a network of hosts. Starting with:
·
a collection of different hosts,
·
a repository of all needed software packages, OS versions, and
data files,
·
a specification of the functions the system as a whole is
intended to perform.
The systems
configuration tasks are:
·
Initialize the hosts by loading the correct OS, software, and
data, and then configuring the OS and software appropriately. (This is
sometimes called the bootstrapping service.)
·
Reconfigure hosts whenever the system specification changes.
·
Reconfigure hosts to maintain conformance with the specification,
whenever the environment changes (e.g., when some server breaks down).
When dealing with a datacenter/enterprise (clustered)
applications, per-host journals cannot (and should not) be maintained. Changes
should be made using a configuration management tool. By keeping a history of
every change (diffs of the CM tool’s configuration file(s)), you can always see
exactly what was done, when, and by whom. You can roll back changes if
necessary as well.
Details on why you made those changes and notes on the
process used (say to mention any issues encountered) should be recording in a ticketing
system. The log file of CM changes should reference that ticket.
A home-grown collection of scripts and
data files was common for years but doesn’t scale either. It also doesn’t work
well, resulting is lots of fire-fighting activities.
Current CM
Tools
Most current CM methods use a
special tool that lets the SA define the policy in a declarative,
system-agnostic way, then automatically apply that policy to specified hosts.
The SA defines the system specification, the location of the hosts,
repositories, etc., and lets the tool do the rest. Those hosts are monitored
by the tool, and any problems (for example, Apache web server is supposed to be
running but it isn’t) are corrected by the tool automatically. Such tools
include Cfengine (oldest), AutomateIT, Bcfg2, Puppet, Chef,
SaltStack (or just Salt), Terraform, and Ansible. (There are many other such tools,
but these are the most common FOSS tools used today and are well supported and
maintained.) There are also commercial CM tools, such as Red Hat Satellite.
Ansible is one of the more popular tools and is described below.
One problem with these tools is that
they all use different terms and concepts, so knowledge of one may not transfer
to another.
Ansible is a bit different from the others. It aims to
keep it simple and doesn’t attempt to do all the tasks that the others
provide. This simplicity also leads to high performance in some cases but bad
performance in others.
All current tools specify policy in
text files. These can be versioned, so the state of your data center at any
point in time can be determined easily. This concept was mentioned previously,
as infrastructure as code.
For example, using these tools you might
specify “package: apache; action:
running; firewall-rules: allow TCP/80” as part of a web server policy.
The tool will use apt, pkg, yum/dnf, or whatever the OS needs, to make that
happen. (At worst, the policy will also need a distro-specific package name.)
Should the web service be turned off (say, because some required library file
was upgraded to an incompatible version), many of these tools will reinstall
the service if possible, automatically. If the tool doesn’t know how to
perform some task on some distro, you would probably have to spell that out in
the configuration file(s) or specify a script. But that is no more work than
if you had to write a shell script for the task.
CM tools perform a number of basic
operations. You specify what you want done or which operations to perform, and
the tool handles the rest. Some of the basic operations include: create/modify/delete
users and groups, copy files (such as httpd.conf)
to a server, start/stop/restart services, add a periodic (cron) job, setup
databases, or even create and start new VM instances in your cluster.
The policy is read by the tools and a
series of basic operations is then performed. You can add to the list of
operations by creating new scripts. In addition, CM tools often allow you to
use templating systems and variables, so the actual steps done or config
files generated can be customized with IP addresses, etc.
In most CM tools, operations can be applied repeatedly
without causing problems. Such operations are known as idempotent.
(The operations never would say “add foo to PATH”, but rather “set path to
...;foo”.)
Puppet and Chef use Ruby for the
scripting language. Salt and Ansible use Python and the Jinja templating engine. Salt started life
as a remote execution framework, which seems to scale better than Puppet or
Chef. Ansible only scales easily to hundreds of hosts; with work, maybe to a
few thousand. (From what little experience I have, I prefer Salt or Ansible.)
Terraform is becoming popular
(2020), although Ansible is still the most popular. From their website:
Terraform is a tool for building, changing, and versioning infrastructure safely
and efficiently. Terraform can manage existing and popular service providers
as well as custom in-house solutions. Configuration files describe to
Terraform the components needed to run a single application or your entire
datacenter. Terraform generates an execution plan describing what it will do
to reach the desired state, and then executes it to build the described
infrastructure. As the configuration changes, Terraform is able to determine
what changed and create incremental execution plans which can be applied. The
infrastructure Terraform can manage includes low-level components such as
compute instances, storage, and networking, as well as high-level components
such as DNS entries, SaaS features, etc.
All the CM tools can monitor the
execution of the operations on each remote system, and report that back to the
sys admin.
If you have a backup of the CM tool policy file(s) and a
storm destroys your company’s data center, you can sign up for Amazon cloud
service, upload your configuration, then restore the customer and other
databases, and finally change your DNS to point to the new cloud servers. The
whole process might take hours instead of weeks.
Other tools are commonly
used, but only help with some of the tasks. Such tools include using databases
(referred to as the configuration management database or CMDB), which
should not be confused with asset management. (Qu: What kind of queries
do you think would be useful?) Other tools include a repository of software
(sometimes called a software depo service) and patches, a variety of
shell scripts, and open source and commercial tools. These are all used to
monitor the system and apply updates, and revision control systems.
Other issues to consider
are that updates and reconfigurations are made on a production network, so
[Limoncelli & Hogan]:
·
It is not okay to flood the network with updates all at once;
·
No software update should require physical access to the host;
·
No update should crash the host, as it may have live users;
·
Hosts may not have the previous configuration assumed (the user
or some SA may have changed it) so any update must carefully check;
·
Remember, dual-booted PCs may be currently running a different OS
than the update is for.
SAP is an acronym
for “System Application & Products”. It is also a commonly used brand of
ERP (Enterprise Resource Planning) software, which creates a common
centralized database for all the applications running in an organization.
Today, major companies including Microsoft and IBM use SAP’s ERP to run their
own businesses. SAP’s suite of applications provides functionality used to
manage product/service operations, cost accounting, assets, materials, and
personnel. (There is some FOSS ERP software, including Apache OFBiz, Opentaps
(built on top of OFBiz), OpenBravo, and
more.
Configuration Management for Cloud-based
Systems — New CM Tools
Modern data centers have
issues and needs that the tools discussed above do not address. Those tools
were designed for configuration of single-purpose servers. When you had a cluster,
it was a small one made of dedicated servers. The services (daemons) on these
servers use text-based config files that rarely change. It was easy enough to
use rsync or sFTP and a bit of shell scripting (using cron perhaps) to make
sure all the servers in a cluster had the same config file.
As clusters grew in size
(“scale out”, or “scale horizontally”) and the number of such clusters grew, tools
such as Puppet automated and centralized a lot of the effort in maintaining consistent
config files.
Unfortunately, over the
years the situation has become more complex. Today it is common to have
dynamically sized clusters that can quickly “spin up” a new virtual machine and
automatically configure the cluster’s load balancer to use it. Web applications
(now known as software as a service or SaaS, which is discussed
below) use more dynamic configuration that frequently changes. For example,
Facebook use feedback from monitoring tools to not only control the number of
VMs in a cluster but also to enable/disable features when response time is too
long, or when performing A-B testing.
Such systems can’t afford
to only periodically update a config file and then restart a server; they need
to be continuously available. Such SaaS systems often skip the /etc/whatever
files and use a configuration database accessed over a network. But tools such
as Puppet would require starting a Puppet process on each VM, updating the main
Puppet instance to know about the new VM, sync the config files, and restart a
service.
A number of newer
configuration management tools have appeared to handle this type of problem. These
are known as orchestration tools and can help manage a dynamic cluster,
where VMs are shifted from one server to another based on load, starting up new
instances, and having configuration information consistent for all VMs. Since
moving a VM from one physical host to another might change its network address,
service discovery is required as well. A new type of cron service is
needed as well, to ensure periodic tasks are run on the cluster.
These tools don’t use
config files for their configuration and policy info. At their heart is a
key-value store (database) for all configuration parameters that can be
accessed directly by modern applications in real-time. Because of the critical
nature of this DB, the tool uses some complex techniques to ensure it remains
available, responsive, and uncorrupted. These newer tools can include
additional features as well, such as cluster monitoring or the ability to generate
an old-fashioned conf file for something such as httpd or sshd, whenever the DB
is updated.
One mature FOSS tool is xCAT (Extreme Cloud Administration Toolkit),
originally from IBM before it was put into open source. It can be used to
manage and provision thousands of hosts in a data center. While still actively
maintained (2018), I don’t know how popular it is.
Related to configuration
management are tools designed to keep configuration data available, reliable.
These perform other cloud and/or container needed services for distributed
applications. One of these is Consul
(created by Hashicorp,
who have released many popular FOSS products). Such tools may not be suitable
for CM by themselves, but you may run across them in some organizations and
they can do some of the CM tasks.
Configuration
Management for Mobile Devices
Mobile Device Management
(MDM) is another form of CM. Smart phones, laptops, and tablets have special
configuration needs since they are not usually (directly) connected to your
organization’s network. Some of the tasks MDM can perform include distributing
applications, locking or wiping a single device, sending software updates,
remotely troubleshooting a device, pushing out settings and content, enforcing policy
compliance across platforms, managing device lifecycles, detecting jailbroken
or rooted devices, encrypting sensitive data, and monitoring usage.
Three Laws of Mobility
(3LM) for Android and BoxTone (for everything else) are two older examples.
In March of 2012, Apple released its CM tool for iOS devices, Configurator.
Today MDM is a crowded field, with many
commercial and FOSS packages available.
A Brief Introduction
to Ansible
Ansible is a popular CM
tool. It is easier than most to set up and configure. There are no daemons to
manage. You don’t need to install anything on the other hosts (the ones you
plan on managing). It’s light-weight and a small laptop can be used to
configure a fleet of servers. When you run an Ansible command to do something
on some host, Ansible uses SSH to connect to the remote host, creates an
efficient and safe Python script to do the task, runs the script, collects the
results, and terminates the session. If your task involves multiple steps,
they are done in one session. If you are doing some task on multiple hosts,
Ansible will start SSH sessions on each and do the tasks on all hosts
simultaneously.
You are not required to
specify shell commands with Ansible, although you can run arbitrary commands
too. Rather, Ansible includes over 700 modules, each doing some task in
a safe and efficient manner. There are modules to install packages using dnf, others for apt or other packaging systems.
Modules exist to control services (start/stop/enable/disable), to modify
configuration files or upload files (such as web server content), and so on. A
typical Ansible script (called a playbook) lists a series of
tasks (modules) which get run in order, and on which hosts.
Ansible requires Python to
be install on each computer you plan on managing. To allow Ansible to do its
work efficiently and without prompting you to enter passwords for each
computer, you generally create an SSH key so you can run Ansible without entering
any passwords (useful when configuring many servers at once). Additionally,
some (most) tasks will require root privileges on the remote computer. It is
wise to run Ansible as a user who can run sudo
or su without a password. (Use
a strong SSH key only for access to that user!)
Without any configuration
at all, Ansible can SSH into localhost and make changes. You can thus practice
using Ansible on a single virtual machine to learn. To manage other hosts, you
need to list them in an inventory, often just a file listing
hostnames or IP addresses. Hosts can use wildcard patterns and can be grouped
into categories such as “web-servers”, “database-servers” etc. The inventory
can be created dynamically. For example, if you use AWS (Amazon’s cloud service)
you will have your cluster grow and shrink all the time. Ansible can get a
current inventory automatically from Amazon.
To use Ansible, install it
(and Python) using dnf. (Note
Ansible has two versions, one for legacy Python2 and one for Python3.) Next,
create an SSH key for yourself or an ansible user account with su or sudo
privileges. Finally, configure either su
or sudo to run from your account
without prompting for a password. (The last two steps are not strictly
required; if you don’t have a key or don’t configure su/sudo,
Ansible will prompt you for passwords as needed.)
All set! (Not so hard, was
it?) You can now manage localhost
with Ansible if you wish. (That’s the only host Ansible knows about by default.)
Here’s a trivial example use of the ping module:
$ ansible localhost -m ping # just connect
and exit
localhost | SUCCESS => {
"changed": false,
"ping": "pong"
}
If you have added a host to
your inventory, you can run modules or shell commands on it. Here’s how to run
the uptime command on a remote server named ServerA:
$ ansible ServerA -a uptime
ServerA | SUCCESS | rc=0 >>
21:05:52 up 4:42, 5 users, load average: 0.02, 0.03, 0.00
Lastly, remember you can
create a playbook of steps to do a more complex tasks, such as install Apache,
enable it, upload configuration files (including PKI certificates) and web
pages, add users (if needed), and start the server. You then run the playbook
on one or more hosts with a single command such as:
$ ansible-playbook setup-webservers
and Ansible will run all the
steps in that playbook, on all the servers listed in it. So, if tomorrow you
decide to change the configuration of all web servers, you edit the one
playbook and then re-run it. (It is common to keep playbooks in a version
control system, such as Git.)
For large and complex
playbooks, Ansible allows you to break them up into (reusable) pieces called roles.
To set up a web server with a database, you might use one playbook, but you
could also define two roles, web-server and database, and the playbook can use
those roles instead of listing all the modules and commands needed. Even
better, for each role you can set parameters, so the same role can be used in
multiple playbooks even if some details differ. Roles also support pre-tasks
and post-tasks to be executed for each role used.
The Ansible community has
contributed many well-written roles and playbooks, available at galaxy.ansible.com. You can download
these with the command line tool ansible-galaxy,
to use or just to study.
There’s a GUI front-end for Ansible named Semaphore.
This overview only
scratched the surface of what Ansible can do. Their website contains excellent
documentation if you want to play with this some more.
Configuration servers fall into two groups: configuration
management of servers, such as Puppet, Chef, Ansible, Salt, and Terraform, and
application configuration data servers including Zookeeper, Consul, and Etcd. Applications’ configuration settings can come from a file
(possibly managed by some CM tool), from the command line, or from a
configuration server. Types of such data include username, network connection
data, file names, application modes, and so on.
Application configuration data servers are designed for enterprise applications
run in a data center, and often include other services and features. For just
configuration data, I like etcd.
Using such a server means your distributed application can
have its configuration updated dynamically, without a restart. However, the applications
must be written to use such a server.
SaaS (Software
as a Service) and Web Services
Both consumers and
businesses today depend on third-party services such as Facebook, Twitter,
Gmail, and Amazon. In the corporate world, there are also custom
line-of-business applications and software-as-a-service (SaaS) applications,
also known as cloud applications, such as Google Apps and Office 365. (In the
old days, “SaaS” was called a web server. :-) Such services typically roll-out
updates on a rapid release schedule (a few weeks, or just days (or even
hours) between flash-cut roll-out of the new version), which (some) consumers
favor. However, this approach means businesses don’t have the traditional
options of testing and rolling out the change on their own schedule. There is
often no notice given, and some of these services (such as Facebook) don’t even
have version numbers. Besides the obvious problems of security and failure,
help desk staff who were trained on the old version won’t know about changes.
Companies want to use SaaS
providers for the reduced administrative burden and convenience. However, this
exposes them to less control over the software they use, and to an update
policy they no longer control at all. Organizations want to use Web browsers
as a portal to access such applications, but Web browsers, with their considerable
consumer focus, have increasingly consumer-oriented upgrade policies.
The approaches taken to
upgrades and feature roll-outs by SaaS providers do vary, both in terms of
notice and flexibility. Zoho for example offers
a variety of Web-delivered applications including CRM (Customer Relations
Management), desktop productivity, bug-tracking, mail, and wikis, to more than
five million users. They provide advance notice prior to any substantial
updates, and early access to those updates so that its subscribers can test and
validate them. During this period, subscribers can switch between the old and
new versions.
Google has two tracks for
Google Apps: a Rapid Release track and a Scheduled Release track.
On the Rapid Release track, features are available as soon as they pass Google’s
quality assurance processes. On the Scheduled Release track, new features are
announced and delivered only on Tuesdays. Each Tuesday, the company decides if
any Rapid Release features are ready for the Scheduled track, and if so, it
announces them. The following Tuesday they are then rolled out, so at least
one week passes between the Rapid and Scheduled releases, and potentially more
if problems are found after the Rapid release.
Google Apps customers can
switch tracks at any time, but it’s an all or nothing proposition; if a small
group of users wishes to test the Rapid Release track to get an early look at a
scheduled feature, they must do so using a different account. This two-track
approach only covers a handful of Google’s services: Mail, Calendar, Contacts,
Docs, and Sites. Everything else is rapid release only.
Microsoft has yet another
approach. The company states that “major service updates are rolled out to the
service as they become available”, with no option to delay or defer the
upgrade. However, administrators can control the availability of new
functionality through the administrative dashboard, which allows some
ability to test updates and “prepare their users appropriately” before rolling
out new features.
When your organization
depends on some external service, you can only support what they will support.
For example, Google supports only the two most recent versions of any browser. So
when Internet Explorer 10 was released in 2012, one side-effect is that any
company still using Windows XP was no longer be able to use Internet Explorer
to access Google Apps; neither Internet Explorer 9 and newer will run on
Windows XP.
Mozilla has recognized that its new rapid release policy
has not been welcomed with open arms by IT departments. Past attempts by
Mozilla to undertake corporate outreach have not been particularly successful;
the original Enterprise Working Group had three meetings in 2007 before
apparently giving up. Extended Support Releases are available as of 2012.
So what can an IT
department do? One option is to abandon the browser as a platform for internal
applications. While this runs contrary to the trends of the last 15 years, for
organizations with strict testing and validation requirements it must be an
option.
The simplest option is to
avoid the issue entirely; freeze your software versions and retain full control,
by avoiding SaaS services with inappropriate update policies. A more robust
long-term solution is to have your software not target any particular browser
version, but instead target the relevant Web standards, and test your software with
a range of browsers.
Finally, there are software
products that allow you to run multiple versions of web browsers, and to
redirect various URLs to one or the other. Microsoft’s MED-V does this by
using a virtual WinXP machine to host IE8. Browsium’s Unibrows software does this
without virtualization. Instead, Unibrows creates a compatibility environment
that allows the legacy browsers to run directly within Windows 7.
Asset
Management
This is the work done in
tracking all hardware, including servers, routers, PCs, laptops, tablets, smart
phones, etc. Software can be assets too. This information is kept in a
database, sometime just a piece of paper or spreadsheet. However, keeping the
data in a RDBMS has many advantages. You can just use SQL to quickly answer
questions about all equipment of a given vendor, all routers whose support
contracts expire within 3 months, all switches connected to the same LAN, and
so on.
Periodically (usually each
year) an asset audit is performed, walking through every location to
make sure all equipment is where it should be. (HCC does this, requiring
faculty to bring in any portable equipment and leave it in their offices
overnight. Accompanied by a high-ranking administrator, a sys admin scans
every bit of equipment with a portable bar code scanner.)
For each IT asset you need
to track, you need to keep lots of information, including these (from a list
found at thegeekstuff.com):
Description, hostname,
department or person assigned to, type (router, switch, server, ...),
manufacturer, model, status (in use, in warehouse), serial # (assigned by
vendor), asset tag # (assigned locally), location (including rack/shelf
position), IP addresses, switch port connected to, monitored (say with Nagios),
OS/firmware detail (including version), warranty start and end date, type of
warranty (on-site support, 24 hour support, etc.), warranty service contact
info, date of purchase/lease (and lease expiration), price and terms (monthly
payment, buy-out/trade-in), notes (e.g., web server URL, purpose of equipment,
... The purpose can be related to Nagios type values).
Software assets must be tracked to ensure compliance with
software license agreements, organizational and regulatory policies. They need
to be discoverable if installed. They must be secured according to your
policies. They must be kept up to date. While there are several tools
available that help with one or another aspect of this, there’s no standard way
to keep track of everything required.
Software
Identification (SWID) Tags, are defined by the
ISO/IEC 19770-2:2015 standard. SWID Tags provide a way for organizations to
track the software installed on their managed devices. SWID Tag files provide
an inventory and contain descriptive information about a specific installed
version of a software product. The SWID standard defines a lifecycle where a
SWID Tag is added to a host as part of the software product’s installation
process and updated when the software is patched. The tag is replaced when the
software is upgraded with a newer version and deleted by the product’s
uninstall process.
This enables various tools to examine the tag files to see
what’s installed, witch what patch levels, and with what security configurations.
However, SWID Tags are new (2016) and not widely used yet (2020).
The type of software used
for asset management usually includes a feature called “auto-discovery”, which
means it scans your networks looking for stuff and probing everything to learn
about it. (The Sys Admin must still fill in the missing data.) Such software
has an additional use, to periodically scan for any unauthorized changes. Such
scan might be conducted hourly, daily, weekly, monthly, or even less
frequently.
There is lots of software
available for asset management, some as add-on module such as for ERP
software. About the best software today (2016) is Spiceworks, which requires a Windows
host to run. Other popular software includes RackTables
and Open-Audit. (GLPI, a more
full-featured resource management solution, uses other FOSS products to provide
scanning: FusionInventory or
OCS inventory NG; the combination
is popular.)
Case Study: kernel.org infrastructure [From 15
Questions from Kernel.org SysAdmin Konstantin Ryabitsev's Reddit AMA, posted 3/2/2015]
The organization maintaining the kernel use RHEL and vi.
They have about 300 active users (i.e., with logon access).
The infrastructure has three main components: core
infrastructure, interactive web services, and frontends. Core infrastructure
runs our gitolite server, kup server for tarball uploads, and
internal tools. Interactive web runs things like bugzilla.kernel.org,
patchwork.kernel.org, wiki.kernel.org, etc. The frontends run www.kernel.org
and git.kernel.org.
Excepting the frontends, everything is in Portland,
Oregon. The frontends are hosted by ISC, in Palo Alto and San Francisco;
Tizen, in Portland, Oregon; and Vexxhost, in Montreal, Quebec. Each site has
1Gbps of bandwidth.
Gear-wise, we have some older donated HP servers, but most
of the stuff is running on Dell PowerEdge R610s, with a large NetApp on the
backend for networked storage.
They use Puppet, though “if I could do it over, I'd switch
to either Ansible or SaltStack”.
Provisioning
Servers
Server provisioning
means to prepare a server with appropriate operating systems, data, and
software, and make it ready for operation. Typical tasks when provisioning a
server include:
·
Install the appropriate operating system, including partitioning
etc. Physical servers may need firmware (BIOS) changes as well.
·
Install middleware (such as databases, Java, .NET, etc.) and required
applications.
·
Initially configure the system and the software (can be done by
CM tools instead). This includes IP addresses, routing, DNS, and external
resource locations such as remote storage, DB, etc.
Once the server has been
correctly provisioned, it is common to make a new image file for it. Then when
you need a similar (or identical) server in the future, you merely need to copy
the image.
For virtual servers, the
process is the same except that you will likely find prebuilt images available
for most popular use cases. After installing the virtual server from such an
image, you only need to customize the networking and external resource
locations that particular instance should use.
Other tasks are not commonly thought of as provisioning
tasks but are done at this time. Examples include configuring load balancers
and firewalls, configuring remote storage, updating monitoring systems,
updating asset management databases, and updating your CM tool(s) to know about
the new server.
At scale, we talk of
virtual machine clusters (or whole clouds), or container swarms.
In such cases, you need to provision hundreds or thousands of nearly identical
servers at the same time. Provisioning and configuration management at such
scale cannot be done manually. Also, many tasks must be done in a certain
order, such as provisioning or configuring a database before provisioning a web
server that uses it.
Cloud orchestration
software is used to coordinate all such tasks. There are many different
tools for this depending on what is being provisioned, monitored, and
configured: For container swarms, Kubernetes
is by far the most popular. For general clouds of virtual servers, OpenStack Heat may be a good
choice. A tool that works for either virtual or physical servers is Foreman. For managing Amazon Web Services,
an obvious choice is Amazon
CloudFormation.
Most of these tools not
only provision but also monitor, configure, and support decommissioning of
clusters or swarms. (Thus there is considerable overlap in these tools with CM
and other tools.) Most such provisioning tools prefer to call themselves lifecycle
management tools.
Patch Management
(adapted from an ACM Queue article from March 2005)
Patches are applied to
applications and to the OS, usually to address flaws but sometimes to add
features or to support newer hardware. Usually new features may require
installing additional packages. While Gnu (and most Linux systems) have no
issue with releasing a new version of a package, a more stable OS such as
Solaris only changes package versions between OS versions. All changes to
existing code are delivered by patches only.
Linux systems are rarely (but not never) patched. However,
most of the concepts for patch management apply to package management as well.
These can be critical to apply,
e.g., security patches. Software vendors have a responsibility to produce such
critical patches in a timely manner. Sometimes a flaw just discovered has existed
for some time, and it may be necessary to have different patches for each supported
version of the software.
Ideally, applying a
patch will not affect any system users. Even simple code flaws may not be
easy to fix, however. The WebDAV issue fixed in Microsoft Security Bulletin
MS03-007 is an example. While the exploit happened in WebDAV, the actual
problem occurred in a kernel function used by more than 6,000 other components
in the operating system. A simple code flaw is no longer easy to fix when you
have 6,000 callers. Some of those callers may actually be relying on what you
have now determined to be flawed behavior and may have problems if you change
it. (This sometimes leads to patches for the patches!)
Pollock’s rule: Never be the first to install new technology.
Avoid any technology whose version number ends in “.0”. A wise system admin
allows others to discover flaws in patches and new releases!
It is important for the
vendor to ensure that one patch doesn’t undo the good work of some prior
patch. Also, some patches may depend on earlier ones. (To avoid that problem,
MS issues cumulative patches, so if you use the latest one you
get all prior ones too.)
Patches may be:
Incremental, in
which a patch depends on all previous patches (that is, patch to version 5.21 must
be applied to version 5.20),
Cumulative, in
which a patch has no dependencies (that is, patch for version 5.21 contains the
previous 20 patches too; you just install this patch to 5.any-version to
get version 5.21), or
Differential, in
which patches are applied to the original version (that is, the patch for
version 5.21 must be applied to version 5.0, not 5.20).
Cumulative patches can get
very large over time. Every so often, Microsoft issues a service pack,
which is just a normal cumulative patch. However, future patches are
cumulative only back to that service pack release. The Linux kernel issues
both incremental and differential patches. (Another term for a cumulative
patch is a rollup patch.)
Patches must be easily
deployable. In some cases, a patch is to the source code of some
application or operating system. This is often the case with open source
software such as the Linux kernel. Such a patch is actually a file containing
the output of the diff command,
and can be used to update the old version of the source code to the new version
using the patch command. Then
the code must be re-compiled and re-installed. This can be quite complex to do.
(This is covered in the Admin II course.)
For proprietary software
the source code is not available, and the only choices are to ship the patch as
a binary diff that
modifies the .exe and other files to the new version, or to ship a completely
updated version of the software (either all of it or just the changed files),
which must then be installed. (rdiff
is useful to create binary diffs. The RH package is librsync.)
Most systems include some
sort of patch management system, or software package system, or both.
Examples of patch management systems include MS Windows Update, Apple Software
Update Service, and Solaris Sun Connection. Examples of package systems
include ones for Windows (Installer), and Debian, Solaris, Slackware, and Red
Hat package management systems.
Most package and patch
management systems can run pre- and post- install scripts with the
package/patch. Small configuration changes may be made by using the patch
management system. A package/patch is created that just runs some scripts
without actually installing anything else. When the patch is deployed, the
scripts run and can change configuration files.
Patches should use a
naming scheme that identifies the software being patched (including its
version number, the software’s new revision number (once the patch is
successfully applied), and the architecture (e.g., PC, IA-64, etc.) and locale
(e.g., English or Japanese version). For Solaris, patches are identified by a
patch identification number (patch ID). This patch ID consists of a six-digit
base identifier and a two-digit revision number of the form xxxxxx-yy.
Patches should be single
files that contain a description of the problem being addressed by the
patch, details of the software and version the patch is for, what prior patches
if any this patch depends on, and any other instructions or information users
of the software may need (e.g., “You will need to reboot after installing this
patch”, or “You must change your configuration after installing this patch”).
Patches ideally support
an un-install, or rollback option. Patches should also add an entry
to a log file for patches.
Patches must be
protected from tampering, and support verification. This is typically done
with digital signatures, or at least with a checksum/digest/hash. Patches can
be made available with a secure web server, or some other TLS-protected
service.
Some patches may not come
from the vendor. This can happen with an enhancement patch, or if the vendor
is slow in supporting its customers. You must be very careful with such
third-party patches! Often installing one voids your support contract with
the vendor. At the very least it can adversely affect future patches from the
vendor.
Patches must be
deployed, and customers informed when new patches are available. This can
be done automatically but that is rarely a good option for servers. Often an
email notice is sent (today RSS can also be used).
Most vendors release patches on a regular schedule. Doing
so allows sys admins to schedule maintenance windows. For example, Microsoft
releases patches on the second Tuesday of every month (“Patch Tuesday”). Cisco
releases patches twice a year. (Of course, if there is an emergency such as a
security vulnerability known to be exploited already, a responsible vendor
won’t wait and will release a patch immediately.)
Notifications should
include detailed information on the problem, affected components and their
versions, instructions and information about installing the patch and any
changes required by the patch, where to download the patch from, and possible
work-arounds for the problem in case the patch can’t be applied immediately.
The notification should
also describe the severity and urgency of the patch (e.g., a security patch
with major implications, but with no known exploits, versus a patch with minor
implications but with current exploits known).
If you have an urgent patch, it may be necessary to skip
some compatibility testing and deploy it quicker.
Once you have been notified
of the availability of a patch, you need to identify all hosts that need the
patch. This includes servers, workstations, and don’t forget remote users
(e.g., those who work from home or use laptops or notebook computers.) Note
some servers run multiple instances of some software, so you need to remember
to patch each instance.
Once you have downloaded
(and verified) the patch, you next need to test it, to make sure it is
compatible with your critical software. Installing a security patch is
useless if it crashes you mission-critical applications!
If installing a patch
requires down-time, you may have to delay installing it on production servers
until a maintenance window is available. Installing patches on clusters and
grids usually requires special planning and support.
To ensure your organization
is fully protected it is important to monitor patch compliance. You may
need to decide to isolate un-patched hosts until they are patched. Other
aspects of patching should be monitored as well, for management reporting
purposes: patch download and install rates, reliability, and whether or not
required reboots/restarts have been done after patch installs.
Patch Management
There are three policies
for how to deploy patches you have received. Note these policies apply to
packages too. You will probably use a combination of these, for different
types of patches/updates:
pull
policy — The SA updates the repository with the vendor-supplied,
verified, and tested patch, along with instructions. The end hosts check and
apply the patches. The checking is called polling.
push
policy — The SA updates the repository with the vendor-supplied,
verified, and tested patch, along with instructions, and alerts the end hosts
to update themselves ASAP. (RSS can be used.)
force
policy — The SA updates the repository, and starts a remote update procedure.
For disconnected and currently off-line hosts, the boot-up/login/reconnect
procedure is modified to do the update as soon as the host next boots/logs
in/reconnects.
A push model works fine for a relatively small numbers of
users. To scale to many users (who may not always be online), a pull model
usually works better; clients can make a check when they boot up. However, if
you need low latency between an update and when it is applied, or updates are
rare compared to the polling frequency, a push model can work better. (Too
many clients, polling too frequently, can overwhelm your update server.) A
combination is also possible: send an alert when the patch is available, and
also let clients ask.
The SA must decide which
patches to apply, and when. There is one rule for this: Deploy urgent
patches quickly and the rest only after through testing, during a planned
maintenance window. The trick is deciding how urgent some patch is, and
applying one of the following categories to decide when to apply the patch:
reactive — Reactive
patching occurs in response to an issue that is currently affecting the
running system and that needs immediate relief. Install these
organization-wide as quickly as possible, often with minimal testing first.
proactive
— The main goal of proactive patching is to prevent
unplanned downtime or, in other words, problem prevention. These are applied
to a working system during a scheduled maintenance window, and need to be well
tested first.
security
— Security related patches are proactive and yet they need to be
installed before the next scheduled maintenance window. (During a security
incident, such patches are reactive.)
new OS
— During an initial system install all relevant patches should
be applied before the first boot (or as soon as possible thereafter).
Security
considerations of patching (From ASD
Top 4)
An SA must keep informed
about the availability of all patches but especially security related ones.
Subscribe to alerting services by the vendor or security organizations (e.g., www.us-cert.gov/cas/techalerts).
What to Patch: Every
server, workstation, network device, network appliance, mobile device, operating
system and installed application needs to be kept up to date in order to ensure
the security of an organization’s operating environment as a whole. A single
unpatched machine significantly increases the attack surface of an organization’s
environment, and this increase is multiplied as more machines are in a
vulnerable or unknown state. Note that updating applications can be difficult
if you don’t know which ones someone might have installed; this should be
monitored. (Ideally, all applications should be approved and allowlisted, and
no others allowed.)
When to patch: Patch
deployment timeframes should correspond to the level of risk associated with
the vulnerability being patched. Patches associated with higher risk
vulnerabilities should be deployed quicker than a patch addressing lower risk. For
patches addressing extreme risk, the deployment timeframe should be within 48
hours. Since it might take time to patch everything, workstations and
Internet-facing servers and appliances should have higher priority than
internal servers.
While it is possible for
any patch to change the state of a system enough that it will function
differently, it is important to weigh this risk against the risk of not
patching a given system. Consideration should also be given to the pre-release
testing which is performed by the operating system or application vendor. High-priority
systems may demand patching sooner than others. This may necessitate less time
spent testing a patch. Conversely, the decision may be made that certain
systems are so critical that extensive testing is required before a patch can
be deployed.
Any decisions that are made
need to be documented in the change management process, well understood and
revisited in light of any new or increased threats to a given system. Change
management documentation should provide concrete examples and clear guidance to
those testing and deploying patches, so the patching procedure is clear for any
given patch.
If you have many clients needing updates, you will need to
release the updates (or notifications of updates) on a staggered schedule, to
avoid having thousands of clients trying to access your patch/package server at
the same time. Microsoft releases patches by time zone, Opera by some random
method; checking for Opera updates can say none available, but trying again
immediately works. (Perhaps they initially say “no updates” to 50% of queries,
and over time, reduce that false notification rate to zero percent.) Other
large organizations can do similar techniques. (One way to avoid this issue is
to use a cloud-based provider, and temporarily increase the size of your
cluster to handle the load.)
Applying patches or
replacing packages can take a long time (in some cases, hours). If the
kernel is updated, or certain other parts of the system such as the glibc or libc DLL, SE Linux policy, or modules on a sealed
kernel, a reboot is generally needed. Worse, upgrading DLLs, configuration
files and other data can cause running processes to become unstable. This
results in long down times, not a problem for home users or hosts in a
cluster. It is therefore often best to upgrade on an off-line system, then
reboot it. You can use Solaris live update or equivalent
virtualization techniques for non-Solaris; this updates an-off-line clone of
the system, then a quick reboot on the clone reduces down-time significantly.
Live Kernel Patching
Linux systems now support patching a running kernel, so
reboots are not needed most of the time. Different approaches are used by
Oracle (Ksplice, now replaced by KernelCare), Red Hat (Kpatch), and SuSE
(kGraft). Red Hat’s approach appears to be the best: all processes are
stopped, then checks made to ensure no process is running the kernel function
about to be updated, then the new kernel function is loaded, a redirect to the
new version is put in (the old version is left in place, so you can undo), and
all processes resumed. While no reboot is used, there is a delay when stopping
processes.
Not all kernel patches can use live patching, only those
updating a kernel function with a new version. If multiple functions are to be
updated, or if a kernel data structure is to be altered, a traditional update
and reboot are still required. (Fortunately, most security patches can use
live patching.)
Live patches are difficult to produce, and today (2019),
live patches are a paid for subscription service for most versions of Linux. Red
Hat’s kpatch for Red Hat Enterprise Linux 7 is available on a Premium support
subscription for $1299 per year. KernelCare costs much less, about $45 per
year.
Whichever system is used, SysAdmins should be prepared for
the time it takes to apply such patches, and also the security and stability concerns
of this approach. Always test patches before applying them to production
servers.
Non-*nix
Patch Management (Skip)
Windows
Patches
Microsoft decided for
Windows 10 to only offer cumulative patches. Users can no longer “cherry-pick”
which patches to include and which to not install; it’s all or none. In
10/2016, Microsoft decided to apply this model for Windows 7 and 8 too, along
with other complicating
changes. Most businesses are upset since if some patch might break
something, they cannot install any of the other patches that month either.
This lowers security. (I suspect the change was made as a reaction to Windows
7 users not installing the Windows 10 update patches; next time, there will be
no choice.)
For patching Windows
clients, Microsoft provides Windows Server Update Services, otherwise
known as WSUS. WSUS provides a way to consolidate updates on one server,
distribute them out to clients, and apply only approved updates from approved
categories at approved times. This is much better than manual updates, or
automatic updates that can break SLAs. (Note Microsoft generally releases
patches on the second Tuesday of every month.)
In response to the large number of patches released in
October 2014, One of the SANs editors (Pescatore) made this observation:
“I think a quad core Intel I7 CPU is rated at something
like 80 Million Instructions per second. This month’s Vulnerability Tuesday
patching and rebooting will take about 15 minutes per PC (more if Oracle or
Adobe trick you into loading those annoying toolbar addons and you have to
remove them...) The installed base of Windows PCs is about 1.5 billion. If
you multiply all that out, it means that 108,000,000,000,000,000,000
instructions will be executed, or about 56,000 Megawatts of power consumed —
all to remediate crappy software that we actually paid for.”
Solaris Patches
(this material applies to Solaris 10 and older, only)
Solaris 11 and newer uses its (new) package system to
distribute patches, rather than use a separate patch facility. Patches are
available from using the appropriate support repository.
Unix vendors such as Sun
don’t generally distribute source code for the kernel, drivers, or utilities.
So when updates are needed you either replace the software (and “update”), or
patch it. These patches are unlike Linux patches, which mainly update source
files. Solaris patches are designed to update binary files.
To see which patches have been applied, use showrev or uname -a.
A Solaris pre-11 patch
file contains one or more (SVR4) sparse packages, delivering
binaries that accommodate new bug fixes and/or new features. Patches are for
either source code (common for open source) or binary (common for proprietary
code, such as a Unix kernel).
Each patch is identified by
a patch identification number (patch ID). The patch ID consists
of a six-digit base identifier and a two-digit revision number of the form xxxxxx-yy.
Solaris patches are
cumulative: Later revisions of the same patch base ID contain all of the
functionality delivered in previous revisions. For example, patch 123456-02
contains all the functionality of patch 123456-01 plus the new bug fixes or
features that have been added in Revision 02. Changes are described in the
patch’s README file.
Patches usually do not
contain all the binaries (i.e., patches are sparse) that had been
shipped with the package they update. Patches may contain scripts prepatch and postpatch, to control installation or to update/fix
configuration files.
The functionality
delivered in a patch might have a code dependency on other patches. That
is, patches aren’t cumulative like MS service packs. If a patch depends
on one or more patches, the patch specifies the required patches in the SUNW_REQUIRES field in the pkginfo file of the packages in the
patch.
All applied patch data is
kept in /var/sadm/pkg/packagename/.
Patching a server with
multiple zones can take many hours! For every patchadd command, patching would first occur for the
global zone followed by patching in the non-global zone. This time increases
linearly with the number of non-global zones running in the system, since all
patching is done sequentially. Also, the time consumed to patch a whole
root zone is more compared to a sparse root zone.
Patches for kernel binaries
and low-level libraries such as libc, etc. need to be patched in single-user
mode. This and several other restrictions are provided in the README file of
that patch. Since this requires significant down time you should schedule
patching frequently during the server’s regular maintenance window.
The recommended solution to
this is to use Live Upgrade, a system where you keep a mirror of
the root partition. You then patch the mirror without bringing down the
system, then a quick reboot using this other root, then finish by patching the
original root. Each patch cycle you alternate between the two root partitions.
To add a Solaris patch
use the “official” tools patchadd
and patchrm. Use patchadd -p to see list of installed patches. A GUI tool
(Solaris9+) is Sun Management Console (smc).
Another “official” tool is smpatch analyze|download|add | update. This tool attempts to
determine automatically which patches you need, DLs them, and patchadds them (update = add but adds dependent patches too).
Sun has new patching
policies, as Sun now charges for support. These policies seem to change
frequently. This has caused great pain to SAs trying to keep their systems
safe, as old tools and procedures (and Internet patch repositories) keep
breaking.
Sun recently released a new
tool Sun Connection (updatemanager
GUI and remote webapp) plus updated smpatch
TUI that will hopefully makes patching much simpler. Using Sun Connection,
updates installed and removed while logged into the global zone will be applied
to the global zone and all applicable non-global zones. This works for Sun
supported Linux systems too. You can also create local patch servers (patchsvr) for your enterprise to use.
You must register
with Sun.com and get access to security fixes and hardware drivers with your
registration. You must have a Sun Service Plan (SunSpectrum, Solaris
Service Plan, or Managed Services) to access the full range of patches,
upgrades, and updates available.
Using
pca [get it from:
www.par.univie.ac.at/solaris/pca
]
The latest version of the un-official,
third party Perl script “pca”
is currently the best (and most commonly used) way to automatically determine
your system, read the local patch DB to see which ones you have installed (This
is not the same database as for the package system), check the official Sun/Oracle
repositories to see what patches you need and are available, download, and
install them. Note you still need to register with Oracle/Sun to have access
to patches.
To use pca with LU, try a script similar to
this:
#!/bin/sh
#
Have pca analyze a non-root filesystem
#
and download the necessary patches:
if
pca --xrefown --askauth --patchdir=$PATCHDIR \
--ignore=123590 -R $ALT_ROOT -d missing
then
echo "$0: Unzipping patches"
( cd $PATHCDIR
for patch in *.zip
do unzip -q $patch
rm $patch
done
)
#
Now apply those patches:
luumount
$BE_NAME
luupgrade
-t -n $bename -s $PATCHDIR
[
-n "$CURRENT_ROOT" ] && lumount $BE_NAME
You can also do this with patchadd.
Solaris 10 has very bad performance
of patching. It can take many hours, and you can’t patch a running
system! It is virtually impossible to apply any kind of large patch bundle to
Solaris 10 while meeting a reasonable SLA.
A method of working around this problem
is recommended in the Sun blueprint document for boot disk layout. You can use
Live Upgrade (LU) by having an extra copy of your boot
environment (BE) disk slice(s). The BE consists of all parts of the
directory hierarchy that may be updated by any patch, install, or update. On
the boot disk this is usually everything except /export
(which contains home).
Assume you used slices 1 (for root) and
3 (for /var). You just make the
new boot environment (BE) from slices 4 (alt-root) and 5 (alt-var)
which initially are identical to slices 1 and 3.
Next you upgrade or patch onto it the
alternate BE, then boot from it. The only outage is the reboot, and the back-out
plan is simply another reboot from the original BE. You can do the next
upgrade or patch onto slices 0 and 2. Meanwhile you just run from the new BE.
The disadvantages are that you have to
design for it, the machine spends half its life running from “strange” slices,
and you don’t have any spare slices at all (so it would not work if you wanted /opt on a slice say).
Another way of patching/updating a system with mirrored
(boot) disks would be to break the mirror then use one of the sub-mirrors for
live upgrade while continuing to run on the other disk(s). That works but the
server has no redundancy until you have completed the upgrade, rebooted, and
re-synced the mirrors. And the moment you rebuild the mirrors you no longer
have a simple/quick way back to the old system. You would have to restore the
boot disk from a backup, which means the back-out takes a long time.
Lecture 9 — Working with Packages (Package Management)
Software comes in three
types: packages, source code, and patches. (A fourth
type would be to download an executable that needs no installation.) A vital
part of a SAs job is installing, maintaining (updating), and removing system
software and applications, installing patches, and configuring all
software including the kernel.
Linux systems are rarely patched. Instead, new versions
replace old versions. New versions may include additional features or be incompatible
with your existing software. Through testing before deployment is important.
It is important to install
software in the right places on your system. Qu: After you have install all
the stuff on the distribution CDs, when you install additional software beyond
that, where will you put it? Ans: Modern systems have standardized where the
stuff goes; see below.
A System roadmap
called the filesystem hierarchy standard (FHS) can be found at: www.pathname.com/fhs/ (or linuxfoundation.org/tags/fhs). See
also hier(7) on Linux, filesystem(5) on Solaris. (Each
distro has its own conventions but all are similar to the FHS.)
Red Hat has recently (2012) decided to eliminate most of
the non-changing bits of the OS, from the root filesystem to the /usr filesystem. /lib, /bin, and others, will end up as symlinks or bind mounts.
Other important locations include /sys, /proc,
and /proc/sys – where you can
view most and change some kernel parameters. (See also sysctl.conf and sysctl
cmd on Linux and /etc/system
and ndd cmd on Solaris).
If you are installing from packages
you may not have much of a choice, as the package author will determine where
the software gets installed. Some packages and all source give you a choice as
to where to install. Most SAs learn over time it is best to keep such
“add-on” software in a different location from the distribution software,
usually a separate partition. Doing so makes it easier later to upgrade
the distribution while re-installing the add-on software.
/usr/local
versus /opt
These locations are for
post-install, non-vendor supplied software. They are meant to make it easy to
determine what was installed with the system, and to upgrade the OS. During
an upgrade these locations should remain untouched (although some testing
is needed, since what was once optional software may now be part of the main
distribution or else been superseded by some other package.) For this reason,
it is often best to make this a separate storage volume.
You probably shouldn’t use
both locations, but sometimes the packages you install will only go in one or
the other location. (Or even mixed in with system software in standard
directories such as /usr/bin.) Whichever
location you prefer, make the other a symlink to it so all your additional
software ends up in a single location.
/usr/local is the easier hierarchy to maintain. All
the standard system directories are duplicated under that: bin, sbin,
lib, etc, man,
... That makes it easy to maintain PATH,
MANPATH, and LDPATH. However name conflicts could
occur (imagine installing two different LDAP packages, both with etc/ldap.conf).
/opt is more complex than /usr/local.
Under /opt are
subdirectories for each package (or each vendor, which in turn may contain
per package subdirectories). Each package (or vendor) directory contains
the standard system directories except for etc
and var; config files go under /etc/opt/packageOrVendor and
data goes under /var/opt/packageOrVendor.
(Also /var/run/opt is used.)
This is more flexible since a user can set their *PATH
variables to use any installed packages they want. Sadly most users don’t want
to set these! Also, if there is lots of software add-ons, *PATH variables grow very long and
become difficult to work with; the user may not be running the program they
thought!
To simplify the configuration
of *PATH, there are reserved
directories /opt/{bin,lib,doc,include,info,man}
that an SA can use to hold symlinks to the real files under /opt/package/*. So only those
directories need be added to *PATH.
Personally, I don’t find many conflicts and most software
is installed by packages anyway in the standard locations and not in either /usr/local or /opt. So I prefer the /usr/local approach as it is simpler to maintain.
To keep all configuration information in one place, you could
create /etc/local and make /usr/local/etc a symlink to
there. However, you will lose your configuration data during on upgrade using
that approach. I would suggest modifying your backup procedures instead to
include /usr/local/etc.
Note that most official packages won’t have conflicting names
on Unix systems. On Linux this is more common and can be handled by the alternatives
system.
Of course, a lot of
software packages don’t follow any standard! Remember /opt or /usr/local
should be a partition, hopefully under LVM so it can be easily grown when
needed.
You may need to configure syslogd and log
rotation, and security (PAM, firewall, etc.) for all newly added software!
(Discussed later in the course.)
Most *nix systems (except
Solaris) use /usr/local, not /opt/*. Most Linux packages will
install in /usr; software
compiled from source goes in /usr/local
by default.
Types of
Packages
Most OSes include a package
system to easily install and update software. A package is usually a compressed
archive file with some standard contents. A package system looks inside
for pre- and post- install scripts to prepare for installation (say by creating
new user accounts) and configure the package (and other scripts to uninstall
it), package version data, package/library/other dependency information, file
lists, and other information. Some will include digital signatures or hashes
(checksums) used to validate the package.
There are many advantages
to using packages, including auto-updating of your system (say by cron every night) to ensure security
and other critical packages are installed in a timely manner. If you don’t
want that, then there are websites and mailing lists you can join to keep
informed of new or updated packages for your system. A package database
is an easy way to inventory your system and to track versions. The dependency
information insures you aren’t missing any vital components.
Advantages of using
source include that packages may not be installed where you want them
(e.g., /usr/local versus /opt), whereas with source code you
can always chose where to put stuff. A package may not be available for your
system (or may be an older version), or may be in rpm format when your
system uses a deb package database. (Not all packages are written
correctly, and thus may not be translatable from one format to another!)
Packages can be either binary
or source. Source packages install the code, which must then be
configured, compiled, and installed. (That usually means you need to install
various development tools, and many libraries; libraries are usually found in
packages named “something-dev” or “something-devel”.) These are
the most portable and configurable types of packages. Installing the source
package provides the advantages of having source code with the convenience of
using a package system.
Binary packages are
much easier to install but will break if some dependent library or sub-system
is not configured the way the package author expected. Often it won’t matter
but missing system admin utilities, the location of fonts, names and locations
of configuration files, etc., could cause some package to install but not work.
A sparse package
contains only those objects that have been altered since the vendor first
delivered the package version in a distribution. These are used for patches.
When code changes are provided with sparse packages, these packages enable
small patches rather than redistributing complete, but large, packages. Sparse
packages also minimize the changes made to the customer’s environment.
Package
Scripts
Packages generally include
up to four shell scripts: preinstall, postinstall, preremove, and postremove.
These scripts do any required tasks, such as creating new users and groups,
creating directories, and so on. For RPM based systems, you can view these
scripts with “rpm -q --scripts
nameOfPackage”.
While most package scripts run quickly, some can take tens
of seconds. Some time-consuming tasks done by these scripts include running prelink (to speed application launches), replace kernels (and
reconfigure grub), and update a security policy such as SELinux. Some
postinstall scripts need to run some additional actions (triggers) such
as rebuilding man page search database or update DLL caches.
Different distributions
use different package management systems. While anyone can create their
own type of package, there are currently few types commonly used: Debian (“.deb” packages), Slackware (“.tgz” packages), Red Hat (“.rpm” packages), and Solaris pre-11 and
BSD (“.pkg”, actually SVR4,
packages) are common. Of these, the deb format was the first to include
accurate dependency lists in the format.
The RPM format has been standardized by the LSB project for
Linux. However, while all popular distros
have RPM commands available in some package or another, there are generally no
RPM repos available for Debian based systems.
A package management
tool (both GUI and TUI) can read packages and correctly install,
update, and remove packages or sets of packages of a given type. The Debian
tools (e.g., apt) will install a
package by contacting an FTP site, downloading the latest (stable) version of
the requested package, check all dependencies, and if needed download and
install those as well. The Solaris package tools and the Red Hat tools (e.g., yum/dnf)
include these features too. Note the Slackware package name (.tgz) is unfortunately the same
extension commonly used for source code tar-balls.
A package system includes a
package database, keeping track of which packages (and which versions)
are installed on the local system. This DB is used to determine if a package’s
dependencies are satisfied.
Some distributions support
two or more package management systems. It is important to use only a
single system! If you have installed a Debian package and attempt to
install an RPM package later that depends on the first package, it won’t know
that the Debian package has been installed, because each system uses a
different database! (The smart package management system at labix.org/smart aims to allow you to
use any type of package on a single system.)
For the same reason, when
installing from source, it pays to build a package from it and update your
database, so the system knows that software is installed already. Otherwise,
the packages that depend on it won’t know that the software has been installed.
Finding packages one at a
time and tracking down the dependencies and installing them can be a pain.
Keeping current is also difficult, as you need to check each package to see if
a newer version is available and should be installed. A good package
management tool will automate these tasks.
The Internet contains repositories
of RPM packages for various distributions (and for noarch packages that
should work on nearly any system) such as freshrpms.net,
pkgs.org, and rpmfind.net.
Larger organizations can (and should) create their own internal repository
(a software depo).
Note that the
extension “.rpm” was a
registered MIME-type for Real Audio, so clicking on such a file link on some
web page may launch RealAudio to play it! Be careful to right-click the
link and chose Save Link Target As... (or the similar choice for your
web browser).
Additional package
management tools can be used to access a configured list of repositories,
compare the contents of those repositories and your system’s installed package
DB, find needed packages including any dependent packages needed, download them
all and install them. Such tools can be used to search the repositories for
new packages to install as well as maintain all installed packages with the
latest versions.
RPM Packages
Newer RPM systems use a GPG
key to verify packages (RH uses this; most other repositories just use MD5
digests/checksums). The GPG key for each repository or package source must be
downloaded (safely!) and imported:
rpm --import /usr/share/doc/rpm-version/RPM-GPG-KEY
To display the list of all
installed repo keys, use: rpm -qa
gpg-pubkey*. (See also the rpmkeys
command.)
To show details on a key,
use rpm -qi name_of_key.
To verify the signatures on
downloaded packages, use rpm -K *.rpm.
Using digital signatures is much safer than relying on MD5
checksums. In 2004, MD5 was shown to have some minor theoretical weaknesses. In
2008 a more severe weakness was discovered. It is possible for virus writers
to craft a virus infected file to have the same MD5 sum as the real file! See www.phreedom.org/research/rogue-ca/
for details.
There are tools that can
convert packages and other tools that can create packages. These are useful
since you must maintain a single accurate database of packages on your system.
However these tools won’t work in all cases.
(See docs.fedoraproject.org
RPM_Guide for details of how to create a spec-file, used to create
RPM packages with rpmbuild.)
Download all the packages
in a set (e.g., KDE) into some directory and install them all at once with: rpm -Uvh *.rpm
(-U=install or update if newer, -v=verbose, -h=show progress bars). It is best
to install RPMs all at once; the tool can resolve circular dependencies amongst
them. You can install packages directly from the Internet by providing a URL,
e.g.:
rpm -ivh http://download1.rpmfusion.org/free/\
fedora/rpmfusion-free-release-16.noarch.rpm
To remove (“erase”) RPM
packages, use: rpm
-e packageName.
To view information
(“query”) about installed RPMs: rpm
-q packageName.
To view information about packages downloaded but not
installed, add the “-p” option” and list the pathname of the RPM package.
To do a case-insensitive
search: rpm -qa | grep -i packageName.
To see what packages were
recently installed, use: rpm -qa
--last | head
To view information about
what package some file is in: rpm
-qf file (use absolute pathname).
Use “rpm -ql” to list files in a package, “-qd” to see the documentation, “-qc” to see the configuration files,
and “-qi” to see general
package information.
There are nearly 20 rpm utilities available on Red Hat and
Fedora, and about 20 additional ones for developers. Type
“rpm<tab><tab>” to see what’s available on your system.
The RPM database (at /var/lib/rpm) may become corrupted or
out of date. You can rebuild the DB indexes with: rpm --rebuilddb. If that fails, try: rpm --initdb (will create if
missing, otherwise works like fsck),
and then try the rebuild. Note --initdb
may lose information about some install packages.
As a final resort: rm /var/lib/rpm/__db.*;
rpm --initdb; rpm --rebuilddb; yum clean all
It is often useful to see which packages were installed,
and which ones had files subsequently modified. (Not every SA keeps an adequate
journal!) Knowing which files (especially config files under /etc) have been modified tells you where to look for local
changes. You can use this pipeline to find out:
rpm -qa |xargs rpm --verify [--nomtime]
This will result in output such as this sample:
....L... c
/etc/pam.d/system-auth
S.5..... c /etc/rc.d/rc.local
S.5..... c /etc/ssh/sshd_config
The meaning of this output can be found in the “Verify
Options” section of the rpm man page (S=size, 5=MD5, ...).
In brief, every package’s files are checked against what the packages says for
them. Only files that appear modified will produce output. Of course some
changes are expected. (Demo with at.)
Handling Configuration File Updates
When updating some package
for a daemon with a configuration file, there can be a conflict between the old
config file and the new version of that file in the package. RPM tries to
handle this intelligently:
·
If the existing config file was never modified from the package
defaults, it is replaced with the new version.
·
Otherwise, if the config file syntax is compatible with the old
syntax, the current file is left alone, and the new default version is saved as
config-file-name.rpmnew.
·
Lastly, if the config file syntax is incompatible, you can’t
continue to use the old config file so RPM renames the existing file to config-file.rpmsave, and installs the new
default config file.
After running updates, you
need to scan for .rpmnew and .rpmsave files, and decide what to do in each
case. A tool that can help with this is rpmconf.
Yum Package
Management Tool — dnf
Red Hat package management
includes GUI tools and also system update tools such as dnf. Previously named yum
(Yellow Dog Update Manager; Show yum.conf),
the updated version was given a new name (DaNdiFied yum):
dnf [-y] upgrade [pgk]
(RHEL 7 still uses yum, but the options for both are
nearly identical. Also, the software depots are still called yum repos.)
These commands work recursively in that if one package needs another, both will
be fetched and installed. These tools can be run via cron automatically each
night.
By default, the GUI runs a yum update process when it
launches. You can turn that off from the GUI, somehow. (Try the gpk-prefs tool.) Note the package database is locked by yum, so only one process can use it at a time. So if some update process
is running, you won’t be able to run any other yum (or some rpm) tools.
At boot time, PackageKit also tries to refresh the yum
database. This also will prevent you from running yum immediately. You can disable that by editing /etc/yum/pluginconf.d/refresh-packagekit.conf, and changing “enabled=1” to “enabled=0”.
Rather than work with RPM
directly, it is often easier to use dnf.
To install a package use dnf install
package. You can also install from a URL (to a package)
directly. If you have a downloaded RPM, it is often easier to install it using
dnf install foo.rpm,
since unlike “rpm -U”, dnf
will resolve dependencies for you.
Running dnf (or yum) can show some confusing messages. After deciding which repos are
valid and should be used, their package lists are downloaded and their
checksums and signatures are validated. Next dnf decides which
packages to install, upgrade, remove, or whatever, and in what order. Any
packages not present on your system already are downloaded and also has its
checksums or signatures validated.
Then dnf runs a “transaction check”,
which is when dnf locks the RPM database and builds a transaction of
commands to run. (Low-level commands to install, upgrade, etc., are appended
to the transaction.) If this succeeds, dnf then uses rpm to “test the transaction” won’t break anything if run: No conflicts
with already installed packages, all packages are install/removed in the
correct order, etc.
If the test passes, dnf instructs rpm to run the transaction. Before and after any low-level command to
install or remove a package, various scripts may run and dnf will show those. However, they don’t always run in the order shown, as
dnf will attempt some operations in parallel.
You can also use dnf to upgrade (update packages) to search for packages, to show which
package provides a file,
and to remove packages. dnf info will show package
information, dnf list
will show packages:
dnf provides \*bin/nameOfSomeProgram
dnf search keyword or name
See the man page for more
details. dnf install/upgrade
will skip packages with missing deps. (To see what was skipped after dnf update,
run dnf check-update). To skip any packages with broken
dependencies too, add the “--setopt=strict=0”
option (you can make that the default, by editing dnf.conf).
You can download packages
without installing, using “dnf download package”. To download the source of any package (the
.src.rpm or .srpm), use “dnf download --source package”.
The command “dnf repoquery
...” is like “rpm -q
...” but for packages in the remote
repos (instead of the installed ones). For example, “dnf repoquery
-l packageName” will list the files installed from packageName.
dnfdragora is the Fedora GUI version of dnf.
Package
Groups and Yum Repositories
Many packages are marked as
belonging to some group, such as “Applications/Internet”.
The list of such groups was found in the file /usr/share/doc/rpm/GROUPS,
but Fedora no longer encourages packages to state a group (so that file is not
maintained and may not exist).
In addition, there are group
packages, which are packages of packages. The names of package groups are
not the same as the names of groups of packages, adding a great deal of
confusion. You can install groups of related packages using the dnf group
commands. Each repo has a list of such groups for the packages it manages, so
the groups available on your system will depend on which repos you enable. The
Red Hat / Fedora “official” group lists keep changing and doesn’t show “hidden”
groups in any case.
Use dnf group list [-v]
[hidden] and dnf group
install (e.g. KDE) to
show and install groups. (The “-v”
shows the shorter group-ids you can use instead of the names; “hidden” shows additional groups not
meant for average end-users, such as “development-libs”.)
Or, you can use regular dnf
commands and specify group names or ids with “@name”.
For example, try “dnf group list -v hidden |grep -i desktop” to see the various desktop choices you have.
In each group package, the
included packages are marked as mandatory, default, or optional. When viewing
and installing package groups, only default packages are shown and installed.
(dnf group info group will show which
packages are optional, mandatory, or installed by default; demo with games.)
To install the optional packages in some group (that is, all packages in the
group), override it on the command line: dnf
group install with-optional package...
Running dnf repoquery --unsatisfied will examine the DB for errors. If duplicates are shown,
use dnf erase (or rpm -e)
to remove the older one. If a yum transaction was interrupted,
you can attempt to complete it with the command yum-complete-transaction, then check for errors again.
(“yum-complete-transaction” was one of many commands
installed with the package yum-utils. These tools
should still work with dnf systems, although since dnf includes this functionality already, this particular utility is no
longer available in Fedora.)
If other problems are noted, it is usually best to erase
those packages, then later reinstall them. Sometimes the reason for a dup package
is a failure in the uninstall script (pre- or post- or both), so some past
update failed to remove the old version. You can use an option with rpm to
skip those scripts, e.g.: rpm -e
--nopreun to remove (duplicate) packages, without running their
pre-uninstall scripts.
When done fixing problems, rebuild the rpm DB (rpm --rebuilddb.) If the RPM DB was corrupted and repaired, chances are
good you need to rebuild the dnf DB too; run yum clean all (after fixing RPM’s DB).
Other useful commands include package-cleanup. See yum-utils(1) (or dnf-utils(1)) for a list.
If some upgrade has broken
your system, you can try dnf downgrade package.
Sometimes there are packages you just don’t want to upgrade
automatically. For example, httpd, mysql, PHP, or Python, since such upgrades
can brake more than they fix. You can list packages to exclude in the config
files or on the command line. In dnf.conf (or yum.conf, or in the repo files),
you can have lines such as “exclude=pkg1 pkg2 pkg3*”.
Every yum package includes
additional information you can display before installing, such as what bug
fixes and enhancements are available, CVE numbers and advisory information
about security updates, and additional information. You can also use this command
to obtain more details about security advisories and CVEs. One use of this
information is to determine which of the available updates to install. While
it is fine to install all available updates on a home or learning or testing
system, not so much on a production server!
You can select which
packages to update based on your organization’s policies for that server, and
use the command yum update-minimal --bugfix to install all bugfix
only updates. Also --security
for only security related updates.
Examples of using these security-related dnf commands:
# dnf
updateinfo info available # list details on updates
# dnf
updateinfo list security
[...]
RHSA-2014:0246 Important/Sec. gnutls-2.8.5-13.el6_5.x86_64
# dnf
updateinfo "RHSA-2014:0246" #Learn about that advisory
# dnf
updateinfo list cves #List all CVEs for your host
# dnf
updateinfo list cves "RHSA-2014:0246" #CVEs for advis.
CVE-2014-0092 Important/Sec. gnutls-2.8.5-13.el6_5.x86_64
# dnf
--security update-minimal # only do security updates
Note the default dnf
install may not include a good list of repositories in /etc/yum.repos.d/. (They kept the
name as “yum.repos.d”.) You should edit this list, adding some Fedora repos
such as RPM Fusion; I also use the Adobe Flash Player
yum repo. Search the Internet for other yum repositories (www.google.com/linux
for “fedora yum repository”).
Oracle provides a public yum server for its Linux, which is nearly completely compatible with RHEL
(and Cent OS), at public-yum.oracle.com.
To
view all installed repos, look in /etc/yum.repos.d/.
You can use the dnf repolist command too, but by default
that only shows enabled repos. To enable all repos, use “dnf repolist all”.
To see what packages are
available in a single repo, use:
dnf --disablerepo="*" --enablerepo="myrepo" \
list available
The yum tool can’t (easily) download source packages, although
dnf can. But the extra utility
includes a nice feature:
yumdownloader --urls --source nameOfPackage
With the --urls argument, it doesn’t download,
only shows you the URL it would use; you can then use wget or curl
to fetch it. Once downloaded (to the current directory), you can install it
with “rpm -Uvh name.src.rpm”.
Source RPMs will install under ~/rpmbuild/. Note that if you run this as root, it will install under ~root/rpmbuild.
For RHEL (or related distros
such as CentOS Rocky),
adding additional repos such as rpmfusion won’t work unless you first install
the Extra Packages for Enterprise Linux (or EPEL) repo. There is
a Fedora Special Interest Group (SIG) that creates, maintains, and manages a high-quality
set of additional packages for Enterprise Linux, including, but not limited to,
Red Hat Enterprise Linux (RHEL), CentOS Rocky, and Scientific Linux
(SL). To install the EPEL repo for CentOS, use:
dnf install
http://mirror-fpt-telecom.fpt.net/fedora/epel/6/i386/epel-release-6-8.noarch.rpm
Then you can install the
rpmfusion repos as normal. For CentOS:
dnf install \
http://download1.rpmfusion.org/free/el/updates /6/i386/rpmfusion-free-release-6-1.noarch.rpm
dnf install \
http://download1.rpmfusion.org/nonfree/el/\
updates/6/i386/\
rpmfusion-nonfree-release-6-1.noarch.rpm
The yum replacement dnf has some differences from yum. One of them is that if an operation
fails, all downloaded packages of that operation are deleted, and you will need
to download them again. You can change dnf to the old yum behavior by setting the keepcache option to true in the dnf.conf file.
DNF
Modular Repositories - Appstream
A newer dnf feature is modular repositories.
Modules (also called application streams or appstreams)
are like release-independent package groups; regardless of which version of
your OS (Fedora) you have, you can install older or newer (or just different) versions
of “modules”.
Installing older versions
is good for servers that require stability. Installing newer versions is good
for development, testing, education, and in some cases, getting a fix not
otherwise available as a package. In some cases, there may be several
different configurations for something (such as an FTP daemon or FTP
on-demand). All available versions and configurations are assigned different stream
numbers and different profile names.
Note that as modules use
RPM, you can still only install one version at a time; installing a different
version (or stream) will replace the version currently installed.
(Installing containers does allow multiple versions of anything to be
installed at the same time.) As bug and security fixes are made available, all
streams of a module get updated (version numbers are different from stream
numbers).
If the repos containing
modules are not enabled, you cannot use them. To enable modular repos (in
addition to the normal repos) if not currently enabled, run
dnf install fedora-repos-modular
To see what software is
available as modules, you use a command similar to the one to list package
groups:
dnf module list
To install a module, just
specify its name using the name:stream/profile syntax:
dnf module install nodejs:6/default
or just:
dnf module install nodejs:6
should work if you want the
default profile. If you enable the module stream it is even easier:
dnf
module enable nodejs:6
dnf install nodejs
RHEL 8 uses this newer design, but still calls the tool
“yum”.
Package
Version Numbers
RPM
package names look like any of the following:
·
name
·
name.arch
·
name- version
·
name- version -release
·
name- version -release.arch
·
name-epoch: version -release.arch
·
epoch:name- version -release.arch
·
...~tag (e.g., “foo-1.0~beta”)
where the version and
release may be two or three levels: major.minor.patch.
With module names, you have
name:stream:version:context:arch/profile, with some parts allowed to be missing
just as with standard package names. See modularity
naming-policy for details.
There is a standard (okay, many of them) for version
numbering. A common and good one is found at semver.org:
Given a version number MAJOR.MINOR.PATCH, increment the:
·
MAJOR version when you make
incompatible API changes (is zero for pre-release versions),
·
MINOR version when you add
functionality in a backwards-compatible manner, and
·
PATCH version when you make
backwards-compatible bug fixes.
In addition, usually some extra information can be included
(after a dash), such as W.X.Y-Z, where the “Z” represents additional info, such
as a build number (often the date when the code was compiled,
encoded in some way).
Arch is either some
distro name, some hardware indication, or both. For example: nmap-4.68-3.fc10.i386.rpm.
Release is usually dependent on the distribution. Names containing ~tag are considered older than
the same version without the tag, even if released later, since RPM v4.10.
(Debian does this too.)
Source packages sometimes use
“src” instead for the arch.
(Usually though, they have a standard name but use “.srpm” for the extension.) “noarch” is used if the package doesn’t depend on a
particular system architecture (i386, i686, ppc, ia64, ...), such as a script
or documentation. Not all RPM packages are named to this standard however.
(And there are other standards, e.g. MS .net, Office.)
dnf has support for “deltaRPMs”. These are sparse packages with the
extension “.drpm”. They contain binary patches (created with a variant of bsdiff) to the previous version of that package (which must be
installed first). Presto is enabled by default since Fedora 12.
An RPM package is a binary
file that contains some header data and a gzip-ed
(or 7zip-ed) cpio archive of the actual files.
(You can extract the cpio
archive from a package with rpm2cpio,
then view its contents with the command cpio -itv package.rpm |less.)
(To support archives larger than 2 GiB, the limit with cpio, newer rpm
uses tar and has a command rpm2archive instead.)
The yum system comes with a
number of additional utilities that are useful; see yum-utils(1). For example, you can use package-cleanup --leaves --all to see
which packages have no other packages that depend on them. (This can be used
when removing one package to also remove other packages that are no longer
needed:
package-cleanup --leaves --all
>before
dnf erase some-package
package-cleanup --leaves --all > after
diff before after
Or, you can dnf install rpmorphan
(also from sourceforge.net). The package-cleanup
utility is very useful; see the man page for details.
The rpm -q
command may appear to show duplicate packages. This happens when the default
output format doesn’t show the arch, since a package may be installed
for several architectures. (Fedora 9 on x64 does that.) The output format can
be changed to include the arch if it doesn’t show by default, by using:
rpm -qa --queryformat "%{name}-%{version}-%{release}.%{arch}\n"
or by adding the line:
%_query_all_fmt %%{name}-%%{version}-%%{release}.%%{arch}
to either /etc/rpm/macros or ~/.rpmmacros.
Upgrading
to a Newer Version of your Distribution
You can use dnf to upgrade,
for example, from Fedora 21 to Fedora 22. There is a special dnf plugin for
this, dnf-plugin-system-upgrade.
In essence, it downloads all the required packages for the new system, reboots
to an install program, then reboots to the new system. See fedoraproject.org/wiki/DNF_system_upgrade
for details.
Debian
Packages
The Debian package
management system has been regarded as superior to RPM (fewer dependency problems,
but that’s likely due more to the single organization supplying packages than
due to a better system). In fact, the tools have been ported to Red Hat like
systems to work with RPMs. If you configure the APT (Advanced Package Tools)
tools to locate the correct repositories (good luck finding any) you can use
these tools to install RPM packages.
One command line tool is dpkg. Use dselect for a menu-driven console interface (GUI: synaptic). Note that dpkg only manages a package once it has
been fetched. You use different tools to access packages from flash drives,
hard disk, CDs, or from some APT repository (the preferred method) on the
Internet.
There is a simpler-to-use
wrapper called apt [dist-]upgrade pkg. This command is part of the
apt package (which is a rewritten version of “apt-get”).
apt uses apt
repositories listed in the file /etc/apt/sources.list
(one per line):
deb
http://http.us.depian.org/debian stable main contrib non-free
Or you can use a command
like this to add an apt repo:
sudo add-apt-repository \
"deb http://archive.canonical.com/ lucid partner"
The latest versions of some Debian-based systems use an
updated format and file for sources.list.
To update your system
takes two steps: apt update; apt upgrade.
The first refreshes the local list of packages. (Dnf does that automatically
if the list is older than 20 minutes or so.) Once your local cache of packages
has been updated, you can also use apt-cache search, just like dnf search. There is also apt
autoremove to delete packages no
longer used.
One nice feature on Ubuntu and Fedora (optionally) is that
when you run a command from the shell, if the command isn’t found but would
have been if some package were installed, the error message says what package
you need! On Ubuntu, this searches only the local package cache, so if that is
very old you may get incorrect information. On Fedora, if the package lists
are old, new ones are fetched, resulting in a long delay. (Edit /etc/PackageKit/CommandNotfound.conf, and changed the last line from “MaxSearchTime=2000” to something like “500”. (That changes the delay
from two seconds to 0.5 seconds.)
The apt* tools manage their own caches. The more
repositories you have in sources.list
the more cache space you need. To fix the cache settings edit /etc/apt/apt.conf and add (shows 24M;
8M or 16M is often enough):
APT::Cache-Limit
"25165824"
Apt-get can be used to download and install packages.
(Demo: apt-get install frozen-bubble.) Use the tool dpkg-deb to inspect and to build deb
packages.
The tools store and use the
package information in /var/lib/dpkg.
Here you’ll find files describing all available packages and their status
(e.g., installed or not).
DEB supports virtual
packages: a generic name that applies to any one of a group of packages,
all of which provide similar basic functionality. (e.g., both the tin and trn
news readers provide the “virtual package” called news-reader. In this
way other packages can depend on news-reader without caring which one
you install.
Debian packages also
support meta-packages, equivalent to an RPM package group.
Some Debian packages use an interactive install, in
which you get asked questions in order to configure the package’s software. If
you skip those (say, when running updates via cron), you can reconfigure any
such package with the command “dpkg-reconfigure name-of-package”.
The .deb files are ar
archives, an ancient Unix archive format typically used for holding compiled C
function libraries, such as in libc.a.
Debian package names have this form: name_version–release.deb. The version
is usually a 2 or 3 level number: major.minor[.patchLevel].
Debian stable systems are updated only very rarely. Debian
also maintains a more leading edge “testing” repository, but it can take years
for packages in the testing repo to make it into the stable repo. Backports are packages from the
testing distribution recompiled for the current stable (or even oldstable)
release to provide users of the stable distribution with new versions of
certain packages, like the Linux kernel, the Iceweasel browser or the OpenOffice.org
suite, without sacrificing the overall stability of the system.
Like the RPM system and
yum, the Debian system and apt* include additional utilities that can help with
managing your system. For example, deborphan.
One interesting feature of
Debian is PPA, or personal package archive. It is a feature provided by
Cononical’s Launchpad service. To users, PPAs are just additional Debian archives.
They can provide unofficial Debian packages, for example beta versions, or
stable packages sooner. Developers can create PPAs on Launchpad. They then
upload Debian source packages to their PPA. Launchpad will build the binary
package and make it available. See itsfoss.com/ppa-guide/
for more info. (PPA predates GitHub repos, but serve a similar purpose.)
“PackageKit is a
system designed to make installing and updating software on your [Linux]
computer easier. The primary design goal is to unify all the software graphical
tools used in different distributions, and use some of the latest technology
like PolicyKit to make the process suck less.”
Snap Packages
Canonical Ubuntu has
switched to the new Snappy package manager they developed. (Debian
packages are still accepted as of 2020.) This is different than other package
managers: Snap packages (called
snaps) are self-contained; there are no dependencies to worry about. Of
course, this also means if you install 100 applications, you will install 100
copies of libfoo or whatever. And if that library ends up with some security
bug, you will need updated versions of 100 packages, not just one. Snaps are
always going to be larger than traditional packages since they include all the
dependencies. (There is one exception: the most common dependencies are kept
in a “base” snap, and other snaps only need to include additional or overriding
dependencies.) To save space, snaps are decompressed when they are run, but
that can slow the startup of large applications. (See wikipedia.org for
more info.)
It also means that an
update to one package won’t break other applications. It also means you can
roll-back any package version, without breaking anything on your system. In
addition to applications, services can be installed with snap. (You then use
snap to enable/disable them. Actually, snap uses systemd internally, so you
can use that too; this also means you cannot use snaps on SysV systems.)
The idea for snappy was
probably inspired by software containers, and indeed Canonical plans on
using Snappy for all cloud-base deployments. When running a binary installed
with Snappy, Ubuntu builds a container environment (similar to chroot) to run that application and
all its children processes. In essence, each Snappy package is a mini FHS
compliant filesystem. In addition to digitally signing the packages (everyone
does that nowadays), the container environment that Snappy uses to run your
applications includes the AppArmor (SE Linux for Red Hat is in beta as of 2017)
mandatory access control (MAC) system, to restrict what the application
is permitted to do.
As with RPM delta packages,
if a previous version of a Snappy package is already installed, only the
differences are included in the download. (You can, however, install multiple
versions side-by-side if desired.)
The installed files are
copied into per-package directories under /app/name/version[.developer],
instead of /usr/{bin,lib,etc}. (Some
docs say the top is “/snap”
instead.) A simple ls on the /app directory shows all installed
packages (except for Ubuntu-core). Every application folder maintains a
symlink named current to refer
to the current version. There is also a folder /app/bin/
that refers to all binaries installed, so you only need add that to PATH. (The entries in /app/bin refer to binaries by nameOfPackage.nameOfBinary.
Fedora since version 24 has support for snap packages.
You can use simple commands
to manage these packages: snap list, snap
find string, snap
install name, snap refresh
[ name ], snap revert
name, and snap remove
name. Snaps are managed
by a daemon, snapd.
You can use Snapcraft to build and publish snaps.
Creating snaps is quite easy.
A snap is actually a SquashFS image
file, that (I think) gets mounted at /snap/name. In there are
config files in YAML format, bin, lib, and other directories, and other stuff. When installed,
any apps in the snap get launcher scripts in /snap/bin, so only
the one directory needs to be on PATH. Because snaps are relocatable, you can
install one in your HOME to play.
Snaps include security mechanisms as well, to restrict where
the snap’s executables can read and write. By default, only access to their
own files is allowed. That can be modified by adding interfaces that
allow additional access to files and devices. (For example, the command “snap connect home” adds the interface home and will allow access to the
current user’s HOME directory.)
Other Package
Management Systems
Zypper is a command
line package manager for installing, updating and removing “ZYpp” packages, as
well as for managing ZYpp repositories. Zypper
is the native command-line tool used to install, remove, update and query
software packages of local or remote media. This is the native package system
used by OpenSuSE. See The Zypper
website for more information.
Some additional package
management systems in use today include pacman (used by Arch Linux), Smart
(system agnostic), Snap (used mostly on Ubuntu), and Flatpak (cross platform Linux containerized apps
for desktop systems). See Wikipedia.org
for a list.
Flatpak — Currently
(2019), both Snap and Flatpak are popular, the others less so. Fedora supports
Flatpak by default since F31. Fedora is aiming to make the Flatpak format the
primary packaging format for GUI applications starting with Fedora 34. (Unlike
Snap, flatpak is not designed for non-GUI apps!) A repo for Flatpak
containerized applications is found at FlatHub.org.
To add Flatpak repos, use this command:
flatpak remote-add --if-not-exists flathub \
https://flathub.org/repo/flathub.flatpakrepo
This adds the repo to /etc/flatpak/remotes.d/. Once you’ve
added some repos, use the various flatpak
subcommands of search, install, update, list,
and others. Creating a flatpak is only a little harder than creating a snap.
OSTree is described
as “git for operating system binaries”. With it, a filesystem tree can be
created, checked in, updated, or checked out, each different tree as a
different “branch”. Containerized applications use this to create a private
(and read-only) view of the filesystem just for that application to use.
RPM-ostree and Flatpak are two systems that use ostree.
Another system related to these is rpm-ostree, a hybrid
image and package management system in use (and thus required) on Red Hat
systems. Since it uses images (think containers) it has many of the characteristics
of snappy and flatpak. To use this system yourself, try project atomic.
In addition to system-wide
package management systems, programming languages that support modules
generally include a package management system of their own. Examples include NuGet (.net platform), maven (Java), npm (NodeJS), cargo
(Rust), gopm (Go), and so on. (I often wish I
could kidnap all those responsible and lock them in a room until they all agree
on a single standard.) Github now (2020) offers registries for these sorts of
packages. Developers (for
a fee) can have GitHub host their stuff, making it easy for users to find
and use the latest versions. See GitHub
Packages for details.
Creating a Local Package Repository:
It is common for
organizations to create internal repos, and only allow servers and hosts to
update/install from it. This give control over when some update is applied
(e.g., after testing). In a larger organization, you may create several repos.
For example, “dist”, “testing”, and “current”.
Creating a repo for any
package management system is fairly easy. You need a directory (and sufficient
disk space) to hold the packages that is network accessible (usually via http
or FTP), and some index files that tools such as yum can use to determine which
packages are where. Digital signatures (or at least MD5 checksums) for the
files must be made as well. These files must be updated whenever you update
the repo. (Don’t forget to allow network access to your repo, through any
firewalls!)
For Solaris, you follow
create a storage volume, add packages, initialize the repo, and finally
configure and enable the pkg service:
#
zfs create zpool/export/s11ReleaseRepo
# pkgrecv -s http://pkg.oracle.com/solaris/release/ \
-d /export/S11ReleaseRepo '*'
# pkgrepo create /export/s11ReleaseRepo
# ... # configure Solaris service, steps not shown
# svcadm enable \
application/pkg/server:S11ReleaseRepo
For Red Hat and other RPM
based distros, the steps are similar (See the yum guides):
#
mkdir -p /var/local_yum_repo
# cd /var/local_yum_repo
# cp my*.rpm . # use yumdownloader to fetch
# createrepo .
# gpg --detach-sign --armor repodata/repomd.xml
# chmod -R a=rX . # make all files readonly
The gpg step is optional, to sign the meta-data. But make
sure the matching public key is available, and your rpm packages were digitally
signed with the matching key. (The steps for this are discussed in a later
course, when you learn to build RPMs.)
Once setup, configure a web
or FTP (or other) server to be able to access the files. Then on the various
hosts that will use this new repo, add a file to /etc/yum.repos.d/
with content like this:
[myrepo]
name = This is my repo
baseurl = url://to/get/to/my/repo/
enabled=1
gpgkey=url://to/get/gpg/pub/MyRepoKey.asc
gpgcheck=1
Installing
from source code:
Using tar review: tar -c|t|x -v -z|j|J -f file files...
tgz (tar-balls): (Demo gcal.tgz:
unpack (tar -xvf file), view README,
INSTALL, ..., then run these three
steps:
./configure --help
./configure --with-included-regexps # needed on F12
make; su -c "make install"
(More details on working
with source code are given in CTS-2322, where you will learn how to use make,
RCS, a C compiler, and other tools.)
Restarting
After Installing:
Once you have installed new
software, you must apply the changes by restarting any applications or services
that are using the old version, or by rebooting the system. When a new kernel
is installed, you must reboot to use the new one. But for other software, you
can simply restart the affected applications and daemons.
For on-demand services such
as FTP or IMAP, you need to kill manually the running process; it should
restart automatically as needed. For stand-alone daemons such as Apache, you
must restart them. (Managing services and daemons is discussed later in the
course.) You should also restart any running applications (such as Firefox, or
even better, the whole GUI) when they are updated.
When DLLs (shared objects)
are updated, every running application or service that uses them must be
restarted. Note that failure to do so may lead to application and daemon
crashing. To find the running processes that use a given DLL such as libwrap.so, use the command lsof /lib64/libwrap.so\*. Note
that some DLLs such as libc (on Linux, glibc) are probably used by everything,
so a reboot may be simpler.
Alternatives
for Linux
When
you install two (or more) subsystems for the same purpose (for example, the
printing subsystem, the mail subsystem, etc.), they may use conflicting
commands and files. For example the standard print commands are /usr/bin/{lpr,lpq,lprm},
and each print system will replace these, as well as various man pages, etc.
Obviously only one subsystem can be in use at once (unless you rename one set
of files), so your choices are:
·
Only install one version of a given type of subsystem.
·
Install both versions and resolve conflicts with renaming.
Even if you install
multiple versions of something, you cannot use them at the same time. Alternatives manages sets of symlinks
for various subsystems. Alternatives replaces commands (and all files)
with symlinks that refer to symlines in the directory /etc/alternatives/, which in turn point to the actual
commands (e.g., lpr.lprng, lpr.cups). For this to work, the
package must name the commands the way that alternatives
expects: typically commandName.packageName. Show for /usr/bin/lp.
The alternative command allows one to
change entire sets of symlinks at once. It also has “sets of sets”. Some
service sets are “followers” to “main” sets; changing the main also changes all
the followers. When an alternatives-friendly package is installed, the post-install
script will invoke the alternatives
command to set up the symlinks.
Note that alternatives is
not a universal Unix/Linux feature. It started with Debian (to complement the virtual
package concept) and was imported into Red Hat. The Debian name is update-alternatives. If your distro
doesn’t have one or the other, you must manually deal with conflicts or else not
install conflicting packages.
The Fedora alternatives
system manages several important subsystems (you can always add others),
including: mta (mail
service: postfix vs. sendmail vs. exim) and print
(print service: lpr vs. CUPS). (Oracle Java packages can be converted to be
alternatives-friendly; see JPackage.org.
Then you have java and javac service sets.)
To see which service
sets are managed: “ls /var/lib/alternatives”. The files
listed here are the valid set arguments to “alternatives --whatever
set”.
A nice way to see what you
can manage and to actually manage them, is with the GUI galternatives tool (not available
for Red Hat-like systems like Fedora).
Trouble-shooting
RPM
I have seen folk install
some package, goof it up, and try to start over by using dnf erase
or rpm -e, only to have the problem repeat. Often, this is due
to the fact that after the initial install and attempt to run, the software
creates/modifies config files, databases, or other files, usually under /etc, /var,
and /usr. These files are not
removed when the package is! If this is your situation, after removing the
package and any dependent packages that were installed, use the find command to locate these extra
files and directories, if any, and delete them as well. (Make a copy
first, just in case you delete the wrong files!) Only then should you attempt
to reinstall.
If your transaction didn’t
complete successfully, use the various yum and rpm commands shown previously to
check and repair the databases if any errors, and/or to complete an incomplete transaction
(dnf should resume an incomplete
transaction just buy running the dnf
command again).
BSD and
Solaris Packages Skip
Software for Solaris
versions up to 11 is delivered in a format known as SVR4 packages. Solaris
packages can also be delivered in Package Datastream format. In this
format a single package file contains one or more SVR4 packages. Package
datastreams are easier to distribute. Unbundle (or bundle) packages from (to)
datastream format files using pkgtrans.
The file /var/sadm/install/contents has an
entry for every file in the system that has been installed through a package.
Entries are added or removed automatically using the binaries installf and removef, utilities used in the package install/remove
scripts.
The commands used on
Solaris are pkgadd, pkginfo, pkgrm, pkgchk.
(See the man pages for details.) Sun uses these to distribute device drivers
too. The BSD commands start with pkg_,
for example pkg_add -r pkg.
To
add a Solaris package foo.pkg that is in package datastream
format:
mkdir /usr/local/foo;
pkgtrans foo.pkg /usr/local/foo all; # unbundle
pkgadd -d /usr/local/foo all
(Solaris packages are now
compressed with 7pa. Make sure
you have SUNWp7zip installed first!) To query the Solaris package system you
can use several commands. For example to determine which package a given file
belongs to, use “pkgchk -lp /path/to/file”. Use “pkginfo
-l package” to see info about some package.
Solaris pre-11 has a
repository for “official” packages, plus two others: opencsw.org (formerly at blastwave.org) home of CSW (community software for
Solaris) packages; see opencsw.org/howto.html) that usually install in /opt/csw, and sunfreeware.com (source packages
only) that usually install under /usr/local.
These are popular and include lots of 3rd party software. Blastwave is a
private alternative to opencsw (you can’t use the two together). It may be
best to create /opt/local &
mount on /usr/local via lofs, or use a symlink.
CSW packages install into /opt/csw with the binaries usually
found in /opt/csw/bin. The
simplest way to download and install packages from opencsw is to install the package pkg_get.pkg. Download it from opencsw.org
and then run pkgadd -d pkg_get.pkg
as root. (You may also need to install either wget-i386
or wget-sparc as wget somewhere in your PATH.) Then update the /opt/csw/etc/pkg-get.conf
(or /etc/opt/csw/pkg-get.conf
if you prefer) to use the closest mirror site to you and the appropriate
subdirectory (unstable or stable).
Image
Packaging System (IPS)
As of Solaris 11, the
old package and patch systems have been replaced with a completely new and
different system called the Image Packaging System (IPS). IPS
package repositories support a completely centralized architecture for managing
a selection of software, multiple versions of that software, and multiple
different architectures. Administrators can control access to different
software package repositories and mirror existing repositories locally for
network restricted deployment environments.
IPS includes a number of
command-line utilities including pkg(1)
and graphical tools, Package Manager
and Update Manager.
Additionally, IPS provides a MIME association of “.p5i” to allow for single click package installs.
IPS provides the ability to
validate its consistency on a system and fix any software packages should any
errors occur during that validation process. IPS also provides an easy method
of sending new software packages to a repository through a series of package
transactions to add package content, package metadata and dependent system
services upon installation to a publisher. Administrators can easily create
and manage new package repositories and associating publishers for local
software delivery in an enterprise environment.
The
new standard repositories are:
http://pkg.oracle.com/solaris/release The
release repository is the default repository for Oracle Solaris 11 Express
2010.11. This repository will receive updates for each new release of the
Oracle Solaris platform.
https://pkg.oracle.com/solaris/support
The support repository is a repository providing the latest bug fixes
and updates. Administrators will only be able to access this repository if
they have a current support contract from Oracle.
While IPS packaging is the
default system for Solaris 11, compatibility for older SVR4 software packages
is preserved with pkgadd and
related commands. The Solaris 10 patchadd
command and related commands are not available on Solaris 11as these have now
been replaced with IPS package management tools.
Lecture
10 — Change Management
Change management
is the process of planning and implementing system changes (either servers,
services, or network infrastructure) and providing post-change follow-up
(documentation, monitoring, analysis, and reporting). It is important that all
system changes are well-documented, carefully scheduled to minimize disruption,
and are reproducible. Following this procedure yields an audit trail
that is used to determine what was done, when, by whom, and why. Change
management is related to but distinct from configuration management.
All changes can have
unanticipated consequences (no matter how experienced you think you are).
Carefully schedule service/server cut-overs. Provide all
potentially affected users plenty of notice (so they can coordinate with you).
Planning, Testing,
and Notifications
All changes must be planned
for. In fact there are standards for this, such as IEEE Std. 828-1998 IEEE
Standard for Software Configuration Management Plans, and ANSI/EIA-649-1998
National Consensus Standard for Configuration Management. The CMP or
SCMP is a plan that ensures management control over versioning, releases,
coordination with other projects, etc., as a part of overall configuration
management. Here we discuss some of the elements an SA must understand to make
changes to a system in a safe and controlled way.
If possible, use a test
system/network to try the change before the cut-over. This is especially
important if the procedure is new to the SAs who have to perform it, under time
pressure, on the “live” system. Not only will you be able to see if the new
service works, but you can practice the change / cut-over procedure without
affecting users on a live or production system.
A set of tests for your
system is known as a test suite. You need to add new tests to the suite
every time you add new software or change procedures, vendors, etc. Before
applying any update to production servers, you must make sure the change
doesn’t break anything that was working fine. This is called regression
testing. Over time, you add (and occasionally remove) tests from your
regression test suite. Usually, some tool (or a script) is used to automate
running these tests; they can take a long time. As you add new stuff to your
systems, the tests you make for the new stuff are then added to the regression
test suite. Regression tests also come from bug reports. You generate a test
that triggers the error, then add that test to your suite, to make sure no
future changes cause that problem to resurface.
A good defensive
strategy is to phase in the change gradually, say by having some “beta”
testers cut-over to the new service/server first while others continue to use
the original service (called a pilot operation). Plan to migrate
users slowly (i.e., a few at a time, also known as a phased cutover) to
the new service (to allow the help desk personnel time with each batch of
users, especially if the change requires updates to users’ workstations). The
opposite of migrating a few users at a time is to cut-over all users at once.
This is known as a flash-cut (or flash cut-over or direct
cut) and is rarely a good idea. (Of course, sometimes there is no choice.)
Sometimes, you can deploy a new service or system while keeping the old one
active (a parallel operation). An example is Google’s newer services.
When you have a cluster of
servers (web, application, or database), it is possible to make changes while
keeping the cluster on-line. A rolling update (a.k.a. a staged
update) is used: update the servers one at a time, by disabling new
connections on one, and updating/rebooting it once there are no more
connections. Then repeat for each remaining server in the cluster. During the
rolling update, some users will still connect to the un-updated servers while
others will connect to the updated ones. Usually, this temporary inconsistency
is acceptable. (It would not be in the case of an emergency security patch, or
if the inconsistency would lead to other problems.)
The same idea can be used
for cut-overs. You remove one old one from the cluster using the techniques
for a rolling update. Then reconfigure the removed machine, add it back to the
cluster, and repeat. This is known as a rolling restart.
The safest way to change or
update a service is to leave the old server in place while installing the new
service on a new server. Once it is working, you can easily replace the old
server with the new. (Usually just changing the IP addresses and rebooting
will accomplish this, usually by a simple configuration change in routers and /
or switches to redirect traffic.) This is also a good way to upgrade hardware
of your servers. In this case, the back-out plan (when the update
doesn’t work) is simply to not cut-over to the new server.
If the change affects the
boot-up scripts or boot-up behavior of services, it is important to test that a
reboot doesn’t fail after the changes have been made.
Sometimes new hardware isn’t available
for installing a new service, or you have one server providing several services
and don’t want to take the risk of moving them all to a new server. Then you
should have a test lab (test network and / or hosts) available, identical as
possible to the in-service ones, and use them to test the change and to
practice the update procedure.
If no spare hardware is available at
all, planning and testing are especially important. If the current server is
powerful enough, you can run two copies of some services on that one server,
with the new service using a different port number. (At some point, you
switch the port numbers, and eventually turn off the old service.) If the
server can’t run two copies of the service, you have no choice to a flash
cut-over.
In either case, the back-out plan is simply
to restore the old service. This requires making backup copies of affected
data and configuration files and keeping them safe and readily available (e.g.,
cp working files to X.old).
Another good idea is to use
a file versioning (source code control system, a.k.a. version
control system) such as RCS or especially Git, to allow easy
logging of changes (so you can tell what was changed, when, and by whom) and
the ability to go back to a previous version without a lengthy backup-recovery
process. These systems either provide file locking to prevent two
people from updating the same file at the same time, or provide some way to merge
changes made by different users at the same time.
After updating a
configuration file there is a risk of a syntax error as most
service configuration files have strict format requirements and servers rarely
check for errors. (This is one reason XML configuration files are
becoming more common.) Creating a script that checks the various files for
errors is a good idea; you make a script that checks out the
required configuration file, puts you into vi,
checks the result for errors, and if none does a check in of the
new version.
Always ask yourself what
other services and/or applications may be affected by some change. For
example, if updating servers results in data or log file changes, monitoring
system may need to be upgraded and/or reconfigured at the same time.
Always test vender-supplied patches, as they might break
important applications. People may assume a bad SA is at fault when a virus
hits for which a patch was available months ago, but often it takes that long
to patch all computers throughout an organization: building a test host,
working out the update procedure, testing the update against many applications,
scheduling a beta-test for a few users, obtaining licenses, training remote
site SAs in the cut-over procedure (or traveling to each site). It all adds up
to months of work in a large organization.
After practicing and testing the
cut-over, estimate how long the procedure will take (if things work) and
then add the time the back-out procedure takes (in case they don’t). The
estimate should include the time needed to verify the changed worked as
expected and that other services didn’t break as a result of the change. This
plus a fudge factor (some extra time for unanticipated problems)
is the estimated time of the disruption you should announce. Use email, text messages
(SMS), motd, web page, or some
combination (there should be a standard procedure for IT notifications). Send
extra alerts to other SAs and to the help desk personnel.
The amount used for a fudge factor varies greatly
and depends on the nature of the task and your experience with the task. When
designing elevators, the weight limit is determined by one cable, and they use
eleven cables (fudge factor of 1100%). Propane tanks for home barbecues have a
fudge factor of 1000% (the maximum tank pressure rating). In aircraft
industry, I think the safety factor for ground operations is 150%. NASA uses
between 110% and 140% for a safety factor.
For non-safety issues, fudge factors may not be a percent,
just some extra time, throughput, RAM, or whatever, added to what you think you
will need. For example, for a cut-over to a new version of your web server,
you might add anywhere from 5 to 30 minutes of fudge factor, depending on your familiarity
with the software and the cut-over process.
Note, some management policies don’t allow any fudge factor.
If anything goes differently than what was planned, the procedure is aborted at
once.
Make sure affected users
are given plenty of notice, so the changes can be rescheduled if necessary.
Always have a back-out
plan (a procedure to restore the original service quickly; sometimes
called a roll-back plan) and a set time to activate it when things
aren’t going well. Don’t give into the “I’ll try one more thing” syndrome!
Even if you get it working you won’t have any clear idea of how you got there
or what else must be updated. Once the estimated time for the cut-over has
lapsed, activate the back-out plan.
Have a back-out plan for
all changes, even if you think the change may be trivial. (In that case the
back-out plan is probably simple too.)
When the new service is
provided by a new server, the cut-over is usually a matter of changing the IP
address of the new server to the old server’s address. In this case the
back-out plan can be to just change the IP address of the new server, and
booting up the old one.
Even this type of change needs planning in advance. Hosts
and remote DNS servers will cache IP address for a long time, usually days to
weeks. This cache time is set on your DNS server; it’s called the time to
live (“TTL”) value. Days to weeks before an IP change cut-over, change the
TTL to one day. The day before the cut-over, change the TTL again to 5 minutes
or less. After the cut-over is deemed successful, change the TTL back to the
original value.
Once the changes have been
made and tested, another notice should be sent out informing users (and
especially help desk personnel) of the cut-over. The affected services must be
monitored closely for a while. The documentation should be completed (not
forgetting to update older help documents if user-visible procedures or
policies have changed). If using a trouble-ticketing system, close the
ticket. Finally, SAs should be at work early the next day and be visible
(giving the message we care).
It is part of your job to make sure your customers/clients,
your supervisor, and other VIPs in your organization, all have a positive image
of your work.
NEVER stop or
reconfigure any service without notifying users of the scheduled
disruption, and always have a back-out plan. Even if you think the
change is trivial or invisible to most users. Re-notify users just before
starting the update procedure. Afterwards provide a follow-up notice.
Additional notifications
should be sent to help desk personnel (so they can update their scripts and
prepare for the expected surge in phone calls) and to management (who may need
to know about scheduled changes even if not directly affected).
Some users may not like too
many notifications. One idea is to have internal mailing lists for different
types of notifications, and a web page where users can unsubscribe to
the various lists, or later re-subscribe. (But don’t let them unsubscribe to a
list for critical notifications!)
Maintenance
Windows
A maintenance window
is a period when regular updates, backups, and other routine maintenance are
performed. Users should not expect the system to be available during this
period. If some change isn’t critical (or trivial such as a user’s password
reset), it is a good idea to wait for the next maintenance window to do it.
Testing is also done during
maintenance windows. Testing means rebooting servers, routers, and switches,
and checking the results. You can also test what happens when multiple
equipment is powered off and rebooted, at the same time. Often a changed
configuration goes unnoticed until some equipment reboots. Testing can convert
unplanned (expensive and embarrassing) outages into planned ones.
If some change can’t be
done within a single window, consider doing the change in two (or more) stages
so no unscheduled disruptions are needed. If this isn’t possible try to avoid
scheduling changes during likely busy times: during trade-shows, end-of
month/quarter/year/semester, etc.
The second Tuesday of every month is Microsoft’s patch
Tuesday. Providing updates on a regular schedule helps sys admins test and
deploy updates; they can schedule maintenance windows appropriately.
Many other organizations have a regular schedule as well;
many coordinate with Microsoft’s schedule. The problem of not doing this is
illustrated with Windows 8 and Adobe Flash. Adobe released an update that
didn’t make it into the next month’s patch set from Microsoft. That meant 10
weeks of vulnerability until the next patch Tuesday. (In Win8, only MS can
issue updates.) Even on Win7, there was a double maintenance window, one for
patch Tuesday and one when the Adobe update was released.
This is why many companies (including Adobe now) use the
same schedule as MS.
Try to coordinate changes
with the backup schedule. This can obviously be important if things go
badly, but can be even more important if the change goes well. How? New
versions of services often have log file or data format changes. If the new
service starts up immediately after a backup you avoid the unpleasant situation
of log files and/or data files with half old data and half new data. This
might cause the new service to not work (can’t read old data) or disrupt
reporting. When scheduling tasks for some maintenance window, schedule the
backups first.
Change
Proposals
If there are many changes
to be made during a maintenance window, then they must be coordinated. One way
is to have change proposals which are required to be submitted a
week (say) in advance of the maintenance window it is planned for. A good
trouble-ticketing system can be used for these (as well as trouble reports and requests
for enhancements, or RFEs).
The
questions to answer in a change proposal are: (Show Sample)
·
What changes are to be made?
·
Who needs to authorize the change? (And record when
authorized and by whom.)
·
What budget is needed? (And who gets billed?)
·
Which hosts? Which network devices (if any) are affected?
·
What are the other service dependencies and due dates (if any)?
·
What / who might be affected by the change? What other
services/scripts need to be updated (e.g., log file monitors, backup
procedures, access controls)?
·
Who will perform the change?
·
How long should it take (before we activate the back-out
procedure)?
·
What is the test procedure?
·
What is the back-out procedure? How long will it take?
·
What follow-up procedures must be done?
·
When is this change scheduled to be implemented (obviously, you
fill in this one later, after you decide to implement this change).
After the change, the same
document should be updated to reflect when the change was made, and any issues
that were noted. At this point, it is no longer called a proposal though.
Mental Checklist
Before Making Changes
(by Peter Baer Galvin, ;login: Apr 08 pp. 62–67)
·
Is the command the right one to make the change?
·
Is the syntax of the command correct?
·
Is there a better way to make the change?
·
Are the right options entered or selected?
·
Is today Friday or some other day on which it would be
exceptionally bad to break something (e.g., the day before leaving on vacation
or for a conference)?
·
What are the chances that executing this will break something?
·
If the change would break something, can I undo the action?
·
Is this a documented way to accomplish the task?
·
If this is a new way, have I documented it?
·
What effect might this change have on security or other services
or subsystems?
Before
using a new tool:
·
Do I have a better tool for this?
·
Is this tool/command multiplatform, or a one-off solution?
·
Does it work or just cause more (or different) work?
·
Is the tool maintained?
·
Does it change too often (causing more work)?
·
How much does it cost, really?
·
Do I already know this tool or is it easy to learn?
·
Is it likely to break something?
DevOps
DevOps is an abbreviation for
development and operations. It is a popular idea for agile organizations.
Usually, developers would try to develop and roll out new features as quickly
as possible, while system admins (IT operations) would desire fewer changes to
production servers, with specified maintenance windows. The two groups thus
have somewhat opposing goals. If your organization has a separate quality
assurance (QA) group, they too have differing goals from the others. These
conflicts decrease developer productivity and increase the time to roll out
changes (annoying users/customers).
The main idea of DevOps is to have the
various groups work much closer with each other, in an open way. (So system
admins know about development and vice-versa, and QA is “baked-in” from the
start). This is supported by rapid, small (incremental) changes to production
servers, which can be quickly deployed, and just as quickly rolled-back in the
event of problems. This can be referred to as continuous deployment (CD).
None of this is actually new, but putting all these ideas together, and having
a culture of cooperation between the groups, is the heart of DevOps. Many
companies want to hire what they call DevOps engineers for IT and/or
development.
CI — continuous integration means automating most of the
development tasks including building and testing.
CD — continuous delivery means taking the results of CI and
producing the final build artifacts (say an RPM package), possibly after
additional integration testing.
CD — continuous deployment means taking the result of
continuous delivery and actually push the new artifacts into production.
While DevOps is a new and evolving
idea, there are a few core principles that define it:
·
perform small changes frequently,
·
use version control for as much as possible, including
application and admin code and configuration files,
·
automate as much as possible, including building, testing, and
deployment, and server provisioning.
·
monitoring systems and applications, and making the resulting
data (metrics) available to developers, QA, management, and of course IT
operations, and
·
have a culture of openness, fault tolerance, and willingness to
learn.
Such a system requires all development
code to be versioned, using (usually) Git. In addition, deployment needs to be
automated (it would otherwise be too expensive to roll out changes 10 or 20
times a month). QA testing needs to be automated as well, as part of the
building process. Finally, continuous monitoring of deployed systems (by
monitoring logs) and alerting admins to any issues helps ensure quality
control.
Infrastructure
as Code (IaC)
If things are automated by a few basic
and simple tools, the builds and deployments are controlled by a few
configuration files and/or scripts. Infrastructure as code says
to treat all your infrastructure as simple and standard tools that are
configured or scripted, and never make manual changes or manually configure a
server by reading a system journal.
The configurations and scripts are
treated the same as the software of the application/service: you use version
control, peer review of any changes, and automated testing.
Such an approach provides what is known as a “repeatable build”, a very
desirable trait.
Operations are managed using the same
rules that govern code development, so new server instances are spun up or
containers deployed via those tools. A system admin should not log in to a new
machine and configure it from documentation (the journal). Instead, a
configuration management tool is used, for example Puppet or Ansible. The
desired configuration is coded in the scripts (configuration files) of such
tools. Changes are reviewed by others, tested, and if approved, added to a
version control system such as Git. The version of the configuration (or the
actual configuration files) can be kept with the programs you deploy (same
package) provided reproducible builds.
A Basic
DevOps Workflow:
1. Changes made by
developers are checked into a source code repository, automatically built, and
unit and other tests (including code style checks) are also automatically
preformed. If any of these tests fail, the change is rejected. Otherwise, the
change is presented for peer code review and compliance auditing, and any tests
that cannot be easily automated.
2. If all tests
pass and all required approvals are obtained, the change is pushed into
production (usually automatically).
3. Such changes
include configuration switches (or toggles) that can be used to
disable the new feature quickly. Indeed, for a major change, the new code is
often pushed out to production servers but disabled. When the system with the
new code is fully deployed, the new stuff is enabled. If any problems are
noted, the new code is simply disabled just as quickly. (Such switches can also
be used for “A-B” testing.)
4. Any changes must
include the changes required by operations (such as new metrics to monitor
and/or new log data to collect), and the versions of all libraries and
compilers (and other tools) used to build the stuff. (Some people advocate
actually using another repository to hold the actual tools and libraries, but
that can take a lot of storage.)
A number of popular tools can help with
DevOps, such as the very popular (2015) Git version control, Jenkins (or its
proprietary parent, Hudson) or other CI tools, Chef, Puppet, or SaltStack to
automate the deployment steps if Jenkins isn’t used, Gerrit, Teamreview or
other systems to help automate review and testing, and finally, CopperEgg, New
Relic, Scout, or some other application performance monitoring (APM) tool to
automatic monitoring of user experience, SQL bottlenecks, and help with root
cause analysis of faults.
(Show the DevOps resources on the
class web site.)
Lecture
11 — Running a Help Desk (a.k.a. support desk, a.k.a. call center)
All organizations have a help desk,
whether or not they officially acknowledge it. The help desk is often a
virtual place (and defaults to the SA’s office or cell phone number) where
people expect to receive answers to computer related questions, to report
problems, and to request changes in service or tutoring for services. The
help desk is often the first contact for new employees and must be able to
answer policy and procedure questions for users in addition to technical
information.
The help desk also provides reports
to management, who can use the data to track how well various services are
working out, what new services might be requested, feedback for policy and
procedures, and workload information (to adjust staffing levels and/or SA salaries).
Security is important for a help
desk, so confidential information isn’t given out without proper
authorization and authentication. If not careful, social engineering
can be employed to have accounts created or passwords changed. (Discuss
scenario in which imposter gains the trust of some SA, then asks for password
or other access.)
Escalation
Escalation is the process
of having an issue moved from the current personnel to another with more
experience, and eventually to management.
A common solution in large
organizations is to have two (or more) levels or tiers of support.
But this can be quite annoying unless handled carefully! Having the lowest
level handle routine requests (password resets, software updates, etc.) allows
other SAs to specialize in more complex parts of your system: network
infrastructure, routing issues, security, email, database, printing, etc. It
also allows a cost-effective way to expand the help desk support hours (up to
24X7). This first level should be able to handle 80 to 90 percent of all
support requests.
Automatic escalation is a very
good idea. When a support call has lasted (say) 5 to 15 minutes the issue gets
automatically escalated up to level two support. (E.g., one local Tampa
company uses 9.2 minutes). To escalate you say something such as “I don’t
think I’m helping you fast enough, let me get a more experienced SA to help
you, please hold.”)
Issues left unresolved for a working
day get escalated up to level two. If not resolved after another day
(“resolved” doesn’t mean completed), management is informed.
Another form of automatic escalation is
when a user is put on hold too long. The call should then be routed to a level
two technician. If none are available (say it is after hours), a message
should provide email and web alternatives plus voicemail.
“System administrators’ only access to developers at [another]
company was through customer support, whose job it was to insulate developers
from talking to customers directly. If that ever did happen, it was called an escalation,
an industry term that means that a customer accidentally got the support he or
she paid for. It is something that the software industry tries to prevent at
all costs.” (Thomas A. Limoncelli, 10 Optimizations on
Linear Search, ACM Queue article Aug 8 2016)
The Face of
the Help Desk
The perception of the
users/customers is important. (Often SA raises depend on what management
hears about them from users.) Always have a friendly and cheerful (but
professional) attitude. If possible, have a single point of contact for each
user. (This helps enormously in a large organization with several SAs staffing
a help desk at once. When the user calls back to add more information it is
convenient not to have to explain that “so and so is already handling this
issue, please forward this call”.) Lacking a single point of contact, make
sure all help desk staff provide consistent responses.
Have a set routine (called “scripts”)
for dealing with support issues and requests, which should include a
professional demeanor. Have some training (including “dry-runs”) and mentoring
(observing more experienced staff) for new staff. Although running the help
desk may be a tiny part of your job, the users will how no idea of your real
activities and will assume the help desk is all you do.
Help desk personnel are provided
with a database of frequently asked questions, or FAQs. When answering a
call, you would type in some search terms and hopefully see the answer to the
question. (Note, this FAQ is often very different from the one an organization
often provides on their website.) In a few cases, the help is automated as a “decision
tree”; you ask questions from a script, select their answer, and another
question is shown for you to ask. This continues until the script reaches a
resolution to the issue (or fails to do so).
Attitude is very important. You
can get very unhappy at this job if you have the wrong attitude! Remember that
one reason you were hired is to handle certain problems that they don’t want to
be bothered to handle themselves, and to answer questions that they don’t want
to bother remember the answers for.
It is silly to get mad at how “dumb”
your users are, or how often they ask the same question, or how they obviously
didn’t read the manual, or when they ask why you can’t just bypass the official
policy/procedure “just this once”.
Depending on the local corporate
culture, tutoring/training the users may or may not help. But if it might,
hold training seminars and offer tutoring services.
At a minimum there should be a
(protected) web site with policies, procedures, contact information (phone
numbers, IM links, trouble-ticketing system links, and hours that the help desk
is staffed), forms, and FAQs (Frequently Asked Questions) that employees
can access. (FAQs should be compiled based on experiences at the help desk.)
New user documentation can be there too. An unprotected web page should be
available for customers to use from the Internet (with a link to the protected
page that requires a login). Make sure the main web page (and selected other
pages, perhaps in a navbar) have a link to the help desk web site.
Having some instant messaging to
the SA on help desk duty is a nice extra. (Show Yahoo IM icon.)
A phone number that can be forwarded to
the (cell) phone of the SA on duty is great, provided it includes voice-mail.
This is especially useful when the network/web server is down!
Finally, your users should have a clear
idea of what support is provided by your help desk. Make sure you know the scope
of the help SAs are to provide and refer users elsewhere (say to management)
when the request is outside this scope. (This might be called the help
desk policy.) Users need to know how long during normal hours and
outside of normal hours both routine and non-routine requests might take.
Telephone Techniques (adapted
from “call_handling.pdf” found 2009 at auditnet.org)
The following are recommendations to
enhance the perception of a help desk:
1. Be courteous at
all times no matter how annoying the caller and whatever your mood.
2. Sit up and take
a deep breath when tense, frustrated, or upset. This is relaxing and removes
tension from your voice.
3. Speak clearly
and respond as quickly as possible, but never interrupt the caller.
4. Listen carefully
and think about what the caller wants you to understand—the caller may not
always say what they mean so stop and think before responding.
For example, suppose a user calls to
complain their system is slow. Ask what is slow, how slow is it, is anything
else slow, when did they first noticed it was slow, etc. It is unlikely the
customer is complaining about an application running on their PC. More likely
is that some server or the network appears slow.
5. Try to smile, it
alters your voice.
6. Understand the
urgency of the customer’s issue, by asking questions if necessary. Escalate
the call if very urgent and you can’t solve it immediately, don’t waste the
caller’s time finishing some “script”.
Politically you may need to handle some
VIPs faster than other callers. (When the boss says to jump, you should
jump!) Most problems need to be fixed in a scheduled maintenance window, and
you need to explain that so callers don’t wonder why their problem isn’t being
addressed.
7. Do not place a
caller on hold unless it is absolutely necessary. Obtain permission for
putting them on hold, and explain how long you expect to be away from the
telephone. (Check back with the caller if you are longer than expected.) Ask
if they would prefer you to call them back by a certain time. Always thank the
caller for holding.
8. Fully document
all of the details the trouble ticket.
9. When the call is
done, be sure to thank the caller.
How to
Handle a Support Call (adapted from Limoncelli & Hogan, ch. 16)
1. The Greeting: This
depends mostly on local (corporate) culture but something like This is Hymie
at the ABC help desk, how may I help you? is effective. You might
personalize if you know the user who is calling.
The greeting should identify you and
calm the caller (if necessary). You need to determine what kind of service is
being requested and how urgent the request is before proceeding.
If the greeting is a pre-recorded
phone message, it should include an accurate current status (“all
systems up”, “web server is down”, etc.) and options (“please hold and your
call will be answered in the order received”, “press 1 to leave a voice mail
message”, ...). Avoid annoying phrases such as I am not available now
or putting jokes in your message. The whole phone message should be very
short, 15 seconds or less.
2. Problem
Identification: The SA needs to determine what the problem really is and
how to classify it. This can be done with a decision tree that the SA
follows. At each point, the SA asks a question or questions, and takes one
branch or another depending on the result. When the decision tree can’t handle
the issue, it might be time to escalate. In a large organization, the user
might use phone menus to classify the problem; in this case make sure the
choices use language the users expect to hear.
The user may report a slow application,
but that could be caused by network problems, database issues, malware running
on either the customer’s end or on the server, a shortage of resources, or
misconfiguration. The trouble-shooting steps vary depending on what you think
is the real problem. Normally you monitor the suspected culprit (e.g., the
network connection, the DB response time, etc.). If nothing is found, try
monitoring another culprit until the problem is identified.
It is okay not to know the answer (or
even the exact problem). It is not okay to pretend you do know and make
a guess.
3. Problem
Recording: This is where the gory details of the issue get written down.
This problem statement should have enough details to provide the clues
needed to understand the problem and to reproduce it.
4. Problem
Verification: The SA should try to verify there is a problem by
reproducing it. For example, if the problem is “the web server is down”, “the
mail server is down”, or “the network is down”, the SA can easily try these
things from their location. Other problems (or insistent complainers) may
require either a personal visit to their site, or (more commonly today) remote
control software (such as VNC), where the SA can attempt exactly what the
user tried with that user on the phone at the time. Note these reproduction
steps should be added to the problem statement.
No problem is understood until
it is reproducible.
If this is a performance problem,
check logs and run monitoring tools to see what the problem is. Normally
a good SA monitors performance routinely and knows well in advance of projected
RAM or other resource shortages. Poor performance may not be a resource
shortage but a misconfiguration or some other serious problem.
If the problem goes away by itself,
log it anyway; a trend may be spotted over time of such intermittent problems.
5. Solution
Proposal List: Once the problem is understood the SA may feel there are
several different ways to resolve the matter. If not it may be more
information is needed, either from the user, by examining the system (say the
log files), or by running experiments. Almost always there is more than one
way to tackle some issue. This is especially true for RFEs; searching the
Internet can often provide ideas and pointers.
In the case of poor performance due to
a shortage of resources such as RAM or network bandwidth, tuning the systems or
re-configuring the application(s) is one possible solution. Increasing the
resource (i.e. installing more RAM) is another.
6. Select
Solution: There likely will be political issues when selecting a solution.
For example, solving DNS problems by adding a secondary server at each site
may be the best technical solution, but your management may think that remote
servers means giving up control, or there may be problems in how to budget the
servers. Ditching a Windows mail server for a Linux or Unix one may not be
politically wise if your management has made a deal with a vendor for some
Windows only software (say that requires Exchange mail protocol instead of IMAP
or POP, for calendaring).
Technically, try to pick the solution
that requires the least work to setup and maintain, and that will scale up well
when your needs increase in the future. Using open standards means more
choices for interoperability. Using open software means no licensing fees.
7. Implement the
Solution: This usually means scheduling the solution for the next
maintenance window, or delaying until management approval (usually needed if
the solution costs money or if it requires a policy/procedure change). If the
solution requires a visit to the user’s site, then that visit must be
scheduled.
Figuring out exactly how to deploy
and configure a new DNS secondary server might take some time even for a DNS
expert. The proposed solution and implementation schedule should be added to
the trouble ticket.
8. Solution
Verification: Never close the trouble ticket until the solution has been
verified as working correctly. This may involve experiments or waiting for
events and examining log files afterward. Sometimes this means a dialog with
the user who reported the problem.
9. Closing the
Ticket: Part of closing the ticket involves informing the originator that
the issue has been resolved. This can be either a phone call or an email (say
with a link to the web interface for viewing that specific ticket). Some
tickets may require additional work, such as documentation updates or
management reports.
A customer should not have to call
the help desk to find out the status of an open trouble ticket. Status updates
should be provided when service times exceed the service level agreement (SLA).
Once the issue is resolved, be
certain that the customer is satisfied with the resolution.
An important part of handling any sort of incident is the post-mortem,
when the IT team works out what happened and why, and describes steps to ensure
this type of incident doesn’t occur in the future. A great example of a
post-mortem write-up can be found on the Cloudflare
blog, describing an Internet outage.
Staffing
Staffing levels vary widely. In an
academic environment, the typical ratio of users to SAs is about 50:1 (at HCC
it is closer to 300:1. That causes all sorts of problems). Sometimes in a
large organization (say Amazon.com) you might have millions to one ratio. The
city of Munich has (2012) around 1,000 staff, maintaining 15,000 PCs in 21
independent IT centers. Metrics used to calculate staffing levels include: volume
of calls to SAs ratio, time to call completion (TCC), and time to
problem resolution (TPR).
In a small organization, the SAs
should take turns staffing the help desk. If someone contacts the off-duty
SA directly, have the SA say “I’m in the middle of another issue now, so I
can’t handle your problem until later. Let me forward your call to name of
on-duty SA who I think can help you right away.”
Even if you are the only SA, you should
set up a schedule (with management approval). Your schedule should
include some quiet time when you won’t respond to help requests that
take longer than one minute to complete. (Except for emergencies, of course.)
If you don’t do this, you’ll constantly be interrupted and you’ll never get
your work done. You may find that most help requests come in the morning, so
set aside the afternoons for your quiet time and do work in the mornings that
you can afford to be interrupted while doing. (Or vice-versa.)
The costs per call to a multipurpose help desk range from
$3 to $18 per call. Approximately 30% of the total call load is
password-related. The bigger the IT infrastructure becomes the more systems
must be password-protected against unauthorized access, and the more passwords
users are required to remember. (Although the weakness of passwords is well
known in the IT industry, passwords remain the predominant method for
authentication.) This hidden cost can be mitigated by implementing single
sign on in your organization.
Help Desk
Software
The alternative to decent software is
post-it® notes. That doesn’t work. One possibility is a PDA but
this won’t work except in the smallest organizations. For one thing management
has no chance to manage the process.
Good software should provide “scripts”
and search/index facilities to aid less experienced SAs. Logs and report
generation are among other useful features.
The most common type of software is
known as a ticketing system (or service ticketing system,
trouble ticketing system, or issue tracking system) and allows one
to enter in support request details, assign SAs, assign priorities, and
automatically log details such as user, SA who handled the call, the date and
time of the call. Ideally such a system can be tied into the phone system, so
these details can be logged automatically rather than having the SA type them
in. This can also provide call routing (“press one to reset password, press
two for an on-going issue, ...”) and call escalation.
A really good system has web interfaces
where users can request support (IM, email links, FAQs, ...), open a trouble
ticket (without using a phone call or IM, that is non-face-to-face
support), and track previously opened trouble tickets. The ability to open a
ticket is especially useful for users to request new services, or for
developers to request enhancements (RFEs) or to report bugs. (Demo www.bugzilla.org, bugzilla.redhat.com. My ACM email as
ID, std weak passwd.) Also show HCC Ticket system (my Office
2013 ticket, HCC email as ID, weak passwd).
The software should allow SAs to log
into the system and see what issues have been assigned to them, and/or to view
issues in priority order. It should allow management to obtain useful reports
on call volumes, TTC (time to completion), SA workload, the rate
of escalation, volume trends, etc. Some software also allows customer
satisfaction surveys (that only the management can see).
Other popular features include the
ability to schedule system maintenance window tasks (by having each task
entered as a separate ticket), and having server/network monitoring tools (such
as HP OpenView or IBM Tivoli) have the ability to automatically create
and enter trouble tickets.
There is free/open source software
available. Of these Request Tracker (www.bestpractical.com/rt) is sometimes
recommended. (Demo yborstudent.hccfl.edu/rt3/
ID=wpollock, pw
“secret”) Others include wreq (www.math.duke.edu/~yu/wreq/) and
ORTS (www.otrs.com/software/open-source).
OTRS is easy to use (has a web interface).
Other popular choices include JIRA (not free but very popular,
the company Atlassian makes several
related products, including an issue tracker and service desk software) and
Microsoft’s Team foundation Server.
There are several browser-based ones such
as Apache Bloodhound and Tiny Issue. However a good
commercial package can be very worth-while (request tracker has a commercial
version too). See Comparison
of Issue Tracking Systems on Wikipedia. (Google searches: “trouble ticketing system” and
“+("Help Desk" OR "Call
Center") +scripts +open”.
In addition to trouble-ticketing
systems, you can use customer relations management (CRM) software, such
as SuiteCRM, VTiger,
Tine, CiviCRM,
or Zurmo. These can be useful to keep track of
those who have reported problems before.
Lecture 12 — Policies, Procedures (Disaster Recovery)
Show Usenix/Sage Policy Docs booklet.
Review disaster recovery web resource.
SLA=service level agreement.
Discuss Disaster Recovery Project.
Centralized
Versus Decentralized Policies
Centralized administration means having
one point for control and policy. For example each site might have its
own pair of DNS servers, but the data on these servers might be controlled by
central administration completely, partially (e.g., domain names but not host
names, or a top-level domain name but not sub-domain names or host names), or
not at all (allow each site to create domain and host names).
How much centralization or
decentralization to have in a large organization? There is no best answer
to this question. As the SA for a larger organization, you will likely have to
understand what parts of the system are centralized and which (if any) are
not. In a smaller organization, the SA may be asked for an opinion on policy
and procedures, and will need to decide what services should be under a single,
central control and which should not.
Note that this decision isn’t all or
nothing! Centralization is a spectrum, with total control by a central
authority at one extreme and no central control or policy at all at the other.
Furthermore, it is likely that some services will be more centralized than
others. Most services will have control policies somewhere in the middle.
Factors to consider when creating
policies or procedures (when deploying a new service) include availability of
local expertise and training costs, budgeting issues, and organization
management structure and politics.
Benefits
of Centralization
Centralization can often improve
efficiency and reduce costs. (At HCC software licenses were too expensive
per class or even per campus, but per college we got great terms!)
Centralization usually means
consistent policies and procedures across the enterprise, always a good
thing.
Centralization or partial
centralization works well for well understood or commodity services such as
printing, file services, and email.
Reasons
for Decentralization
A poorly run central administration
means slow response times and often a worse service than a local "do it
ourselves" admin service can provide.
Centralization can even drive up costs
with bureaucratic overhead such as needless levels of management. Other
problems can include inability to communicate directly with required people,
time wasted with pointless reporting, micromanagement, inflexibility, etc.
HCC story: IMAP mail server went down but web mail service
remained up. Rather than report to the SA in charge of that server, I was
forced to report to my dean, who was forced to report to some V.P., who called
the manager of our out-sourced admin service, who called the help desk, who entered
a trouble-ticket, which was eventually sent to the SA in charge of the mail
server. Of course, none of these management people knew what IMAP was, so the
problem was never reported correctly.
Decentralization usually works
better when deploying new technology, or if various users will have special
requirements (one size fits all is a motto that will doom many
projects), or if local expertise is available, or if IT is budgeted by site.
Decentralization can improve response
time and lower overhead and other costs in many cases, compared with
centralization.
Problems
with Decentralization
If poorly managed, decentralization can
lead to higher costs, and no recourse if no local expertise is available (which
may be needed in many areas!).
Local politics and personality
conflicts can lead to very poor quality of service, as well as poor recognition
for local SAs, just because some local manager doesn’t budget correctly, or
automatically says no to any upgrade or change. (This happens more often than
you might think!)
Decentralization can cause inconsistent
policies and procedures. Central budgeting can cause local service to suffer
scarce budgets.
Lecture 13 — Working with Hardware and Device
Management
A SA must be able to safely add RAM,
install or replace NICs and hard disks. Keep an inventory of all workstations,
servers, network components, printers, etc., (including location, installed
software (and versions/patches), and configuration information). (Demo
installing RAM, drives, add-on boards to visible computer. Have students
practice with RAM.)
Discuss ESD (electro-static
discharge) and how it can damage (cumulatively!) components: handle
carefully, ground yourself using strap or at least touch ground first. Enough
ESD to feel is far more than enough to damage!
Discuss severe shock hazard of
capacitors, even after unit unplugged. Modern devices have “bleeder
resisters” to drain the charge, takes 10-30 seconds.
Be careful when running cabling. Cat5
cables are very fragile and will not operate at full capacity if ever bent
sharply or kinked. Get a professional to run cables or take courses! Cable
types include crossover/null-modem, rollover, and straight-patch. Cables
mostly have cheap and effective PVC insulation, but in a fire this give off
deadly chlorine gas, so use plenum cables in human spaces. Handling cables can
be tricky as a tug or kink can dramatically affect performance (Demo).
There are “structured cabling” or EIA/TIA 568B standards: 100m overall, wiring
closet on each floor, no more than 3m from host to outlet, 90m from outlet to
wiring closet, and 9m of patch cables inside the closet.
Discuss UPS (uninterruptable power
supply): Commodity PCs have cheap and too-small power supplies, especially
if you upgraded the GPU or other components. Esp. in FL, you need to isolate
the wall current from delicate equipment. A good UPS manufacturer is
CyberPower; others include APC and Tripp-Lite. Home units usually include
isolation for phone, cable modem, and USB too. Data centers often have power supplies
per rack, or central ones.
Power supplies fail, but rarely completely. They start
delivering unstable power, resulting is very strange and diverse symptoms. It
isn’t difficult to test
a computer power supply yourself. A thoughtful SA should keep a spare
power supply handy for each type of host.
Disposal of Old Disks and Other
Electronics
In general, don’t throw old computers,
batteries, or other electronics in the trash. They often contain Mercury or
other toxic materials, that should not end up in a land fill (and can be
recycled). But you must make sure any disks or non-volatile RAM has been
destroyed, to prevent leaking of sensitive data. (See the 2-minute YouTube
video on how to destroy
hard disks, and contact your local
county solid waste management department to learn how to dispose or recycle
old electronics.)
Working with
Hardware
Traditional Unix systems ran multi-user
non-GUI applications (DB, Telnet, email, etc.). Hardware on such systems
involves drives (including disk and tape), serial (terminal, modem), parallel
(printer), and networking hardware only. Modern systems are used as
workstations too and include video, sound, and other hardware that must be
configured. Depending on the platform you may also have to manage ISA,
ISA-PnP, and PCI busses, and SCSI, or IDE (or both) controllers.
Hardware is controlled in the Unix
kernel by device drivers. These are small bits of code that have
a common API (software interface) and are integrated into the kernel. (Some
device drivers manage virtual devices, not physical ones.)
Modern systems auto-detect new
hardware at boot time, if that hardware is powered up before the OS boots.
New hardware added once the system boots may or may not be auto-detected. With
Linux you can run a program to force the kernel to scan for new hardware, kudzu. This will rebuilt /sys and then /dev. (With Solaris use devfsadm to rebuild the /device and /dev
entries with a reboot, or touch /reconfigure and reboot. See also cfgadm.)
Some hardware is considered hot-pluggable
and will be auto-detected. This includes USB devices and some others. (Such
devices are normally handled by a separate kernel subsystem and managed by
separate commands, vol* on
Solaris.)
Major and
Minor Device Numbers
Each hardware device used on your
system is represented by an entry in /dev,
known as a device file. These can receive or send data, and
usually correspond to specific hardware (but not always). These are not real
files; the inodes don’t contain location information, but instead have numbers
that indicate the device driver to use, and the specific device, since a system
can have several devices of the same type.
Each device driver has a number known
as the major device number. All hardware that uses the same
driver uses the same major device number. Each individual device is also
assigned a unique minor number (the first drive is numbered 0,
the next 1, and so on). If you have two identical hard drives, they will be
assigned the same major but different minor numbers. (“ls -l”
shows these numbers where the file size is normally shown.)
Some devices use a range of minor numbers to select
features of a particular type of hardware, rather than just to distinguish
among several identical devices. So, minor numbers in the range 1-16 may all
represent device 1, 17-32 for device 2, and so on. The value in the range can
indicate different options. For example, the floppy disk driver on Linux has
major number 2; it uses the minor number not only the device number, but also a
controller number and a density value. (See fd(4) for details.)
Another example is the tape driver (really, any SCSI
sequential device) with major number 9 on Linux. Each device uses eight minor
numbers, four that define block size, compression, density, and other
parameters for that device. Adding 128 to the minor number turns on the
“no-rewind” option.
The names of these files, and even
their location on the disk, is not important to their use. You can create a
device file in your home directory that also access some hardware (if you have
permission, that is). Reading from any device file causes the kernel to send a
read request to that device driver, passing the minor number to the driver as
an argument (and similarly for writes). However, most software will look
for device files in /dev
with a standard name; software won’t hunt around in that file, looking for
an appropriate device file.
Device files and other types of special
files are created with the mknod
command. You need to tell this command the type of special file you are
creating, its name, and the major and minor numbers. Figuring out the correct
numbers and names of device files was not easy. To help, older systems usually
have a shell script in /dev
called MAKEDEV that will create
them automatically with standard names. (Modern systems create device files
automatically; this will be discussed later (see udev below).
Note devices are not files that are
stored on your disk; backup tools will back up the device files, but not the
data on those devices.
On older systems, the minor number was eight bits in size,
limiting minor numbers to 0-255. Nobody had that many devices so this wasn’t
much of a limitation. Now that disks have been decoupled from servers, it does
matter. A SAN can have many more than 255 disks, and each needs a minor
number.
Modern Linux has 20 bits for the minor device number,
providing a maximum of 1,048,576 values for the minor number. Not all software
has caught up. If some application still thinks of minor numbers as eight bits
in size, you may have trouble with a SAN.
Device files come in two types: block
and character. The block devices are any hardware that behaves
like a hard disk. All the rest are character devices, which are accessed a
byte (which was a character in olden times) at a time. (Note, it is possible a
block device and a character device to have the same major number; the
type+major_number determine the device driver used, not just the major number.)
Disk and tape drives usually have two
entries in /dev. The first is
the regular block special file and the second is the character special file,
known as the raw interface to the device. The raw device is
sometimes used for backups, or for debugging disks. (You could open the raw
device with a hex editor!)
In this directory are also found subdirectories
and aliases; this makes it easier to work with the special files. A lot of
software uses these standard aliases rather than prompt the user for the actual
device, so make sure you set these. (MAKEDEV
did that.) Note, NICs are an exception and usually don’t have entries in /dev on most *nix systems (neither do
PPP connections).
The list of major device numbers and
what hardware they refer to is kept in files that vary from system to system.
On Linux, that list is in the file (if you installed the kernel source) devices.txt in the directory /usr/src/linux/Documentation/admin-guide/.
(See also devices.rst, with
additional info about the contents of /dev,
in the same location.)
Also see the numbers for currently
used devices by /proc/devices
on some systems.
Summary
Safety, ESD (note this is cumulative!),
grounding. (Cabling: type (crossover, null, modem, rollover, straight/patch),
plenum, handling, placement, and length; EIA/TIA 568B standards, shock hazard.
Bottom line: Don’t be afraid to hire an expert! Have spare parts: NICs,
drives, cables, RAM, printer supplies too. UPS. Maintenance: BIOS updates,
clean drives. Keep inventory (including installed software standard
configuration).
Use lspci
[-tk] to view bus information. Use smartmontools (smartctl) to monitor S.M.A.R.T.
capable disks. Use lm-sensors (sensors)
to monitor temperature, voltage, and fan speeds. Use dmidecode to see data about your
motherboard (e.g., how much RAM is installed, and in which slots). Some other
useful utilities include lshw [-short], GKrellM, and GSmartControl,
which provide nicer (GUI) output. Be aware that some of these commands spit
out mountains of data unless you use options to restrict what they show. There
are many ls* commands to show
hardware and other info.
The dmidecode command extracts
information by reading the SMBIOS data of
your hardware. You can use it to display all sorts of hardware information,
for example “sudo dmidecode -t {processor|memory|bios}”.
I also like the Bash shell script inxi;
install and try running “inxi -c 0
-v 7 -w”.
RAM
Use top,
cat /proc/meminfo, free, vmstat to monitor RAM and swap space usage.
Disks and
Tape controllers:
Controller information: IDE (hdparm /dev/hda), SCSI which is used mostly on servers (blockdev /dev/sda, hdparm may also work) due to better performance with multiple
devices. lsdev (if available), procinfo -a (demo). smartctl
-{iH} and smartd can be used to check, control
and monitor disks (demo). May be incompatible with hardware RAID. If /dev/sd? doesn’t work, try the more
generic driver /dev/sg#.
See also iostat for monitoring.
Disk Write
Cache
Most modern disks now support an
on-disk write cache, usually enabled by default. This cache accepts data from
the OS and immediately tells the OS the data has been written. This allows the
drive manufacturer to quote more impressive disk speed numbers, but defeats the
filesystem journaling mechanism. While this might be acceptable for home
computers, workstations, or laptops, the risk isn’t generally acceptable for a
server or disks in a data center, unless redundant UPS and generators make the
risk of power loss acceptable.
This can be disabled using hdparm -W on Linux, /boot/loader.conf
setting of hw.ata.wc=0 on
FreeBSD.
Temperature
Monitoring
Many motherboards, CPUs, disk drives,
etc., today include temperature sensors you can monitor. For hard disks that
support SMART, you can get this info from hddtemp
on Linux, prtpicl -v -c
temperature-sensor for
Solaris on Sparc, and /usr/sfw/bin/ipmitool
sdr list |grep
temp for Solaris x86. (See also
sensors-detect and sensors commands on Linux.)
It is long been known that higher
temperatures increase failures of disks, DRAM, and other components. Until
recently (2010), there have been few or no studies of the actual effects
however. As a result, most data centers run colder than necessary.
Recent findings suggest that
temperature changes cause more damage than steady, warmer temperatures.
Additionally, many disk and system manufacturers include “trade secret”
mechanisms to prevent data loss at higher temperatures (e.g., using read-after-write,
or RAW, to verify data). These mechanisms can hurt performance and increase
power use when they kick in automatically when the temperature exceeds some
threshold. For example, in the Crucial M500 SSD, if the drive temperature
exceeds 70°C, “NAND operations” are reduced by “approximately 40%” until
thermals return to normal (from techreport.com).
It has been estimated (2013) that computer
datacenters around the globe account for 3 percent of all electricity used.
The cooling costs of a single datacenter can exceed $8 million a year.
Obviously, monitoring temperature, and planning proper cooling for your
computers, is an important task for sys admins.
Solaris
Disk Commands and /dev
entries
Uses /devices
(much like Linux /sys), but has
links in /dev (use those).
SCSI: /dev/[r]dsk/cAtBdCsD (A=controller#, B=SCSI-ID, C=unit#, D=partition#).
IDE: /dev/[r]dsk/cAdBsC (A=controller#, B=disk#, s=partition#).
/etc/vfstab
probe-scsi, boot -r, dmesg
drvconfig disks
# create /dev entries
format #partitions disk
newfs /dev/rdisk/c0t3d0s0 # adds a filesystem to a disk
fsck #check disk for errors
tunefs, fstyp -v /dev/dsk/c0t0d0s0 # show/change disk
settings
Other
Hardware:
Serial: stty, setserial, getty
(and pals), UART (USART) #s
Parallel: printers, /dev/lp0,
parport, parportpc, ..., lp.o
(just modprobe lp.o). tunelp
USB:
USB (universal serial bus) is a
replacement for older serial ports. USB supports hot-plugging,
which allows devices to be physically attached and removed at any time. USB
supports much higher speeds than RS-232 serial ports (up to 480 Mbps, that’s
bits/second).
There is almost no limit on the types
of devices that can be attached using USB: flash disks, portable disks and
other media drives, mice and keyboards (USB has replaced older PS/2 ports for
these), cameras, microphones and speakers, NICs, etc. USB connected devices
often include their own drivers in firmware, so no special OS drivers are
needed. (Some devices do require additional drivers.) Most USB devices
will appear as SCSI devices on your system. In addition to /dev/sg# you will often get /dev/usb/* devices as well, .../lp0 for a USB printer for instance.
Unlike older serial ports, USB
connections are made to a hub (or USB controller). The socket is
referred to as a USB port. A hub can connect up to 7 devices, including
other hubs in a star-like hierarchical topology. The top-level hub (the USB controller
in the computer) is called the root hub (what else?). A single root hub
can support a total of up to 127 USB devices (counting the hubs too).
USB is a layered subsystem and may use
several device drivers. USB 2.0 for Linux requires the EHCI driver,
plus a USB 1.1 driver, usually either UHCI (Intel and VIA chipsets) or OHCI
(Compaq, most PowerMacs, iMacs).
Use lspci |grep -i usb to see if your host has any root hubs installed, and what drivers are
needed for each. You can see this info with dmesg too.
To see which modules are installed try:
lsmod | egrep 'usb|hci|hid|mouse|Module'
(Some of the modules shown (hid, mouse) are related to user
input.)
To see what USB devices are connected
look at /proc/bus/usb/devices.
Like a lot of the /proc data
there is a command to display the information nicely: lsusb. The “-t” option will show a tree diagram. The
“-v” (verbose) option can be
useful to find identifying data to use for udev configuration.
To see what LKMs might be needed for
some USB attached device you can use a command such as: “usbmodules --device /proc/bus/usb/004/003”.
Linux and Unix (at least Solaris) have
a separate hot-plug system just for USB. On Linux this is done by bewildering
set of files under /etc/hotplug.
Hot plugging for USB (and also PC cards) involves users plugging in devices
while a system is running. The system then has to:
·
Determine the device type and find and load a driver to run it
·
Bind the driver to the device (e.g., have udev set up /dev entries)
·
Notify other subsystems about the device. (This allows disks to
be mounted, Networks configured, or print queues to be added, etc.)
Network
ifconfig,
route, hostname, ethtool or mii-tool -v (Linux only; Solaris uses ndd), lsof -Pi
(lists open ports)
Sound
and Audio Hardware
Processing and mixing audio signals has
always been a CPU intensive job, but eventually sound cards became popular.
These contain a special CPU for the job called a DSP (a Digital Signal
Processor). (A common one is Intel’s AC’97.) To work with
sound software must send DSP processing instructions to the sound card. Since
each brand uses a different API, a device driver in the kernel is used to
translate (“raw”) sound to the DSP’s API. To make working with sound easier
the kernel includes a platform-specific API for sound, and additional device
drivers to translate that API to the DSP’s API. In fact several drivers must
be loaded, for the speaker ports, the DSP, the API, and sometimes “virtual”
sound devices (that can accept “raw” sound). Use “dmesg |grep -i aud”
to see what type of audio hardware is installed. In addition, various
utilities are present to convert between the standard sound formats, and to/from
raw sound.
Raw sound (audio) consists of a series of integers that represent
the sound at a given instant. These are called samples. The sample
size can be 8, 16, or larger number of bits per sample. The samples
are recorded (and later played back) at a specific sample rate
(number of samples per second). Sound utilities allow raw sound to be resampled
to change the size of the audio file by reducing the sample rate or the bit
size of samples. Naturally this loses quality.
To play sound in any of the dozens of popular formats
requires conversion by software (usually a DLL you must install) called an audio
codec (“codec” is an abbreviation for “encoder/decoder”). A big
problem today is that most audio formats are proprietary and require special
licenses, and so don’t ship with your distro (“Mint” Linux is an exception).
You must find and install codecs on your own. Very few formats are public
domain with free codecs, except the “Ogg” family of formats. Others are
usually available free for playback. (The vendor’s dream of market dominance
and making money for the license fees for the encoder part of the codec.) Note
you have similar issues with video codecs.
In 2012, the Ogg Opus
codec was designated an Internet standard, and is supported by all systems.
The Creative Labs “Sound Blaster”
series of sound cards have set de facto industry standards for sound card API
and feature set. Most sound cards provide a compatibility mode for one or more
of the Sound Blaster series. Many motherboards provide a sound chip with Sound
Blaster compatibility on board. The original Sound Blaster card was an 8-bit
card. Today, most of these cards use the 32-bit PCI bus.
Many sound cards also have in interface
to attach a MIDI (from Musical Instrument Digital Interface)
device. Commonly, this interface emulates the Roland MPU-401. MIDI can play
(and record) music as notes, played via some “voice” (instrument such as a
piano or flugelhorn) over several channels (2 for stereo).
OSS (open source sound) is an early
Unix/Linux platform sound API developed by Hannu Savolainen of Finland for
Creative Labs SoundBlaster. OSS is still maintained and used on Unix systems,
however audio features were never a priority for Unix (essentially server)
systems. So for Linux a new API called ALSA (Advanced Linux Sound
Architecture) was developed and is now widely used. ALSA does support an
OSS compatibility mode for old, legacy applications.
ALSA is very powerful but very hard to program correctly.
In addition, certain tasks are impossible by just using a DLL; a daemon is
needed to mix and control sound from different processes. Such a daemon is called
a sound server or framework and includes its own API. Initially
there were many of these, including ones built into KDE and Gnome.
So, to play sound you need to play raw sound through an
audio (DSP) device with a low-level device driver, or using the audio card’s
API (some applications do this and ship with multiple drivers), or the
platform’s API, or some sound server’s API. Multiple device drivers and
processes each think they control the sound hardware, leading to predictable
results: lousy, intermittent, or no sound. Fortunately, most servers don’t
need sound/audio!
(Windows has had this same architecture, with raw sound
drivers, a platform API (“Windows Core Audio”), and various sound servers
(“Direct Sound” and “Direct Music”, ..., and as of Vista, “Media Foundation”).
Today Linux has two popular sound frameworks: JACK
and PulseAudio. These are built on top of ALSA and are interoperable
with it. Modern applications use one or the other to play audio, not ALSA
directly (which would work but interfere with any other audio playing). In addition,
there are many GUI and command line tools for working with audio.
Many professional-grade audio applications use JACK while
most others use PulseAudio. Some applications will use one and some the other,
so it pays to install both. PulseAudio has plug-in modules to send all
output to or from JACK, but to make all the various sound servers and DLLs
work together often requires some tweaking.
To find sound related utilities on your
system, try this shell command:
( man
-k sound; man
-k audio) | egrep '\((1|8)'
|sort -iu
Command-line utilities include play (see
/usr/share/sounds/), rec, and sox which provides various sound conversions and was
written to use the OSS API; aumix,
xmix, aplay, amixer,
alsa{mixer,ctl}, all written to
use the ALSA API; tracker (MOD
player), and playmidi, used for
MIDI sound; and paplay, parec, and pavucontrol , which use the
PulseAudio API and are the preferred CLI player, recorder, and volume
control/mixer app. You can use ffmpeg,
sox, sound-convert, mplayer/mencoder, and others to convert sound
files to many formats.
There are tons of open and proprietary audio tools,
including media players, converters, and editors, such as Amarok, Audacious,
Audacity, xmms2, BMPx, mpg123, Mplayer, Rythmbox, and VLC (available for
Solaris too). Both KDE and Gnome have their own GUI tools and frameworks as
well.
There are also some text-to-speech utilities such as recite, festival, and espeak.
At the lowest level, you can control
all audio streams (input and output) that use the ALSA API with “alsamixer -c0”.
/dev
files: audio, dsp
(OSS), mixer, sequencer, sndstat. Solaris commands that report hardware
information include psrinfo and isainfo.
If the auto-detected sound loadable
kernel modules don’t work, make sure that is the problem. The ALSA system
boots with sound muted. The ALSA libraries must be configured initially to
set volume levels, and to un-mute at boot time.
If the audio hardware isn’t detected correctly,
use sndconfig to probe
for PCI audio devices. If your card isn’t found by the probe, you must set the
parameters (IRQ, I/O and base addresses) manually. However, sndconfig won’t detect conflicts if
used to manually set parameters, so be careful! On Solaris, see the man pages
for audio and also audioplay.
With very old hardware (ISA
bus), install the “isapnptools” software, and use isapnpdump to create /etc/isapnp.conf. Edit that file and
then use isapnp to configure the
devices from the parameters in that file.
Video
Cards (controllers):
To allow high quality, high-speed
graphics software, the bulk of the work of processing video has been off-loaded
from the CPU to the video card. These now contain lots of RAM and even a CPU.
In fact the graphics card/controller is often referred to as a GPU -
Graphic processing Unit. Of course there are many different video formats,
a few free and open and many proprietary ones. To use video (record, play, or
convert to or from) you must have the correct video codecs
installed.
GPUs are so powerful that today they can be used for other
purposes, such as code breaking. In face some computers contain multiple GPUs
for intensive processing that multi-core CPUs can’t do well.
Graphic processing can be more
time-consuming than even sound processing. To speed things up the modern video
cards support a standard API in hardware. The two most popular such APIs are DirectX
and OpenGL. Since Microsoft embraces DirectX, many games use
DirectX and most video cards support that. Of course they may not support the
most current version of DirectX! If the software uses OpenGL or an old version
of DirectX, a kernel device driver can be used to translate. But also note
many modern video cards support updatable firmware.
Today it is not uncommon to use your computer
both as a workstation and also to listen to radio or watch TV. These require
special hardware (capture cards and tuners) and of course special device
drivers. These cards often are bundled with application software that uses the
(custom) API of your hardware/device drivers, and that software may not work
with another vendor’s hardware.
To connect monitors to video cards is not simple. There is
a large range of “standards” for this: VGA, s-video, DMI, H-DMI, LVGA, ... To
hook up a computer to a TV, or a laptop to a (remote) projector, requires they
have some port technology in common. In 12/2010, Intel and AMD announced they
are phasing out support for the common VGA ports and their products will only
support HDMI and DisplayPort (replaces LVGA for LCD devices).
There are many free/open and
costly/proprietary video players, recorders, and editors you can use to create
your own videos, record, edit, and play video to/from your TV (a personal
digital video recorder, or DVR), including the popular MythTV.
Fortunately, as with audio, servers rarely if ever need to include GPUs or play
media. (However they often serve streaming media, but it is the clients
that need the codecs and players, not the servers.)
HTML 5 includes a new video element, designed to
replace Flash and other proprietary standards for such media with an open one.
H.264 is high
quality but encumbered by patents and non-open licenses; Ogg Theora is open source but with inferior
quality to H.264. (YouTube, QuickTime, Blu-ray, and MPEG-4 all use H.264.)
In 2010, Google purchased VP8 codec, with near H.264 quality,
and made it open source. Then Google, Mozilla, and Opera announced the launch
of the WebM Project, to develop a
high-quality, open-source, royalty-free video format suitable for the Web. WebM
files use VP8 for video and Ogg Vorbis for
audio. The video and audio data will be combined into *.mkv files based on the
open-source Matroska. Many browsers and
tools support WebM. (IE9 only supports H.264 by default, but you can download
other codecs.)
Currently (2013), Google is developing VP9 (next version of
VP8), a video codec to replace H.264. Google and MPEG-LA have reached an
agreement that VP8 (and I suppose VP9) will be royalty-free, forever. It’s probably
too late to include VP9 as a required part of HTML 5 (and beyond), so adoption
will depend on which browsers choose to support it, and if developers make VP9
content.
In 2013, the High Efficiency Video Coding (HEVC/H.265)
codec was announced as the successor to H.264. It has been approved
by the ITU and ISO/MPEG. It is likely this or VP9 will become standard.
Meanwhile, in 2014, Firefox 33 ships with an H.264 plug-in; it’s a surrender of
sorts.
(The
xine package supports some weird codecs. aaxine will display MPEG videos as “ASCII art”.
Libcaca is another codec
that does that, useful for text-only videos, for example “mpv dvd://1 --vo=caca”.)
Laptop
and Notebook Computer Hardware
Portable computers
typically contain non-standard hardware, to keep them small and lightweight.
This hardware often requires proprietary drivers which aren’t usually available
for BSD or Linux (Solaris isn’t designed to run on a laptop, but it might on
some PCs). The laptops that do run Linux/BSD usually contain modified kernels
and proprietary drivers, making it difficult to upgrade the OS later. This
situation is changing though.
Laptops/Notebooks
have add-on slots for PCMCIA or PC-Card peripherals. The modern
PC card is often a 32-bit card. These work just like normal PCI add-ons and
require no special setup to work (provided you have the correct drivers
installed).
Older PC cards
work more like ISA add-ons. To support these, a program called cardmgr on Linux watches
the slots for card insertions/removals. It ignores 32-bit cards and handles
the rest (loading modules, with the correct options, and creates /dev entries).
Cardmgr often
requires the hotplug package. Upon
insertion cardmgr looks up the
card’s identification string in /etc/pcmcia/config, which lists the correct modules
to load and a hotplug script to run. (This sources the file /etc/pcmcia/config.opts, so make changes
here. The scripts in turn are configured from /etc/pcmcia/*.opts files. See also
the cardctl ident command to
configure and control cards.
There are websites
that provide hardware compatibility and reviews, especially useful with laptops
running Linux. For example, see phoronix.com.
Hardware
Virtualization (V12N) Overview
V12N
is not a new concept. Mainframes have run virtual OSes, called “guest OSes”
for many years. Even on PCs, parts of a system are virtual (storage
volumes, memory, etc.) Here we talk about virtualizing the hardware of the
server completely. Typically this is done by having a “host” OS run a “hypervisor”
program that handles all hardware communications from each “guest” OS. The
guests don’t realize they are sharing the hardware; the hypervisor tricks them
each into thinking they have access to real hardware, not the fake hardware the
hypervisor presents to them. System admin of the guest OSes is no different
than if V12N wasn’t used. (Except the “fake” disks won’t support SMART.)
There
are two major benefits of virtualization: consolidation and resiliency:
Consolidation is having
multiple operating system instances running on one physical server platform,
storage platform, and networking environment. Provided that there are adequate
hardware resources to meet the requirements of the guest OSes, the benefits of
virtualization are better resource utilization (and those lower cost), especially
in the multi-core CPU era.
Resiliency is about having
enhanced survivability added to the running “guest” OS, typically through
features like live migration (LM), high availability (HA), and more
recently fault tolerance (FT):
Live migration is the relocation
of a virtual machine to a different physical host, with no downtime or
interruption in service. This is great for environments that need to guarantee
up to 99.99 percent uptime of a service.
99.99 percent, or “four nines”, uptime means approximately
53 minutes of downtime per calendar year, or about 4 minutes per month. When
you consider that a single reboot can threaten your uptime rating for a month,
it comes as no surprise that most enterprise apps end up being clustered.
Because of the high number of physical systems and the bulk
of data, cloud systems need even higher uptime reliability. Amazon’s simple
storage service (S3) offers 11 nines, and some cloud providers offer more than
that.
High availability means the ability
to configure automated VM restarts should either the guest OS unexpectedly halt,
or a physical host in a cluster of servers fail. Should the latter be the case,
the VMs are reassigned among the surviving hosts and powered on. This should
minimize downtime before personnel reach the scene and begin manual recovery. This
can be tricky to utilize fully, because uneven VM resource allocations can
wreak havoc with network bandwidth or server resources such as memory.
Fault tolerance means having a
copy of a running VM running on another physical host, and everything about the
two VMs are synchronized: CPU states, memory states, and disk reads are
streamed to the backup VM to ensure that execution is kept identical down to
the individual CPU instruction. If the primary physical host suddenly fails,
the backup VM immediately becomes the active VM, with no interruption in
service or availability. Having this level of availability is very important
for Tier 1 (mission critical) applications, where waiting for a reboot onto
another physical host takes too long. While twice the computing resources are
necessary for this to work, sometimes that’s a very small price to pay compared
to the losses incurred should a critical VM be down even for just a few
minutes. Note any type of failure within a guest OS won’t be prevented by FT.
Lecture 14 — Modern Device Management for Linux: udev, drivers, etc.
On older *nix systems, you needed to
create a /dev entry manually for
each device added to the system using mknod.
This was such a pain that systems would ship with thousands of entries in /dev already so if you added any
standard hardware, the /dev
entry for it was likely already there. If not, you needed to know the device’s
major and minor numbers to use mknod.
This was confusing and many systems shipped with a shell script usually called MAKEDEV that helped (so you didn’t need
to look up the device numbers).
All modern systems now automate the
process of creating device files and their aliases. On many systems, /dev is now a RAM disk, creating empty
at boot time; as the kernel detects hardware, various rules tell the system what
device files to create. However, these systems can fail or may need
configuration, so an SA must know something about how this works. Here we
discuss in detail the Linux system called udev. This is
implemented as a userland daemon named udevd
that uses a secure socket to communicate with the kernel. Other systems work
similarly.
The Big
Picture: What happens when a new bit of hardware is detected?
The udev daemon udevd receives hardware update messages
from the kernel and consults its rules for what actions to take. The rules are
stored in text files, applied in a specific order (first matching rule wins),
and a SysAdmin can modify these rules. The rules specify what entries to add
in /dev (their names,
permissions, and any symlinks), based on whatever is discoverable about the
hardware: type, MAC address for NICs, serial numbers, vendor, location (which
bus and slot), the order of detection, and so on.
Linux HAL (Hardware Abstraction Layer)
provided a view of the hardware attached to a system, updated dynamically as
hardware configuration changes via udev (or other mechanisms), hopefully in an
application-friendly way. But HAL was completely redundant with the kernel’s
hardware database, exposed by sysfs (/sys). It originally had some
design flaws as well.
In 2009, HAL started a major rewrite and the result got a
new name: DeviceKit. (There was also DeviceKit-disks and DeviceKit-power
sub-systems; each manages just those types of devices.) DeviceKit* is simpler
than HAL was, and should enhance the GUI admin tools while not impacting system
administrators much.
In 2010, DeviceKit* were rewritten again, and they’re now
called Udisks and Upower.
After creating /dev entries, udev broadcasts messages
(using D-Bus) where daemons such as Network Manager, upower, Gnome/KDE, and
udisks can see them. These in turn consult their config files to determine
what they should do. Usually they load relevant kernel modules (if udev didn’t
already), configure the new hardware such as bringing up NICs, mounting disks,
etc. These daemons may also broadcast messages over D-BUS to let applications
know about the available hardware. Note applications (such as Gnome desktop
manager) talk to subsystem daemons such as udev by using D-Bus, both receiving
notifications and sending commands (such as “eject”).
(Demo: # udevadm monitor -kup,
then insert CD-ROM, then run “eject /dev/sr0”.)
A SysAdmin can examine and manage
the udev system using udevadm.
Some details:
·
The hardware bus detects attached hardware electrically. It sends
a signal to the kernel.
·
The kernel updates /sys
(sysfs) (or /devices on Solaris)
with the information, then sends a hardware detected message to udev.
(A uevent is sent to the udevd
daemon through a netlink socket, a type of socket used to send messages securely
between the kernel and some applications.)
·
Udev consults sysfs for the device particulars, consults its
rules files, and then creates one or more entries in /dev for the devices. (Sysfs gets updated with the
device name too.) Next udev runs modprobe
to load in any required drivers. Finally, udev sends a hardware detected event
message over D-BUS.
·
HAL is considered obsolete in 2011. It has been replaced with
other software. But if present, when notified by udev (via D-BUS) HAL examines
the device particulars from sysfs, the device drivers, etc. and creates an
abstract representation of the device, with pre-defined properties any
application can query, and with a standard interface, so applications can easily
be written to configure the device. HAL makes this representation available as
a tree (much like /sys; use lshal), then publishes (broadcasts)
a “new device present” event over D-BUS. Although not required by HAL, some
systems (Fedora) have the hald
automatically mount storage volumes under /media
or /run/media, provided there is
no entry for them in fstab
(which presumably would mean some automounter would do it, after getting the
HAL message over D-BUS). HAL has been replaced by a number of daemons, each
responsible for a particular type of hardware: udisks (previously known as
DeviceKit-disks), upower (previous, DeviceKit-power), NetworkManager
(previously, network), PulseAudio (for sound hardware, but not on all *nix
systems), and others. Each of these daemons provides an interface via D-BUS
for applications to use.
·
When running a GUI, the desktop manager is listening on D-BUS for
new hardware (and other) events. It consults a policy manager to decide what
to do and what the current user(s) can do. Typically, it will draw new icons on
the desktop for the new media, and allow the user to mount/umount as needed.
Notice how confusing this is! Also notice
that the kernel, udev, HAL, and the rest, all keep independent views of
hardware, and that both udev and HAL (or its modern replacements) send events when
new hardware is detected, and each can run a script in response to hardware
changes. On Linux, HAL deprecated (2011) and is being removed from all systems
as quickly as possible. I suppose applications will listen for the udev “new hardware”
events instead.
(One detail not covered is that udev
itself requires some /dev
entries in order to work. The kernel creates those.)
A final point to note is that udev is not part of the kernel. Moving some traditional kernel
tasks to unprivileged daemons has some advantages, and there are several
examples of this beside udev. However, the kernel must trust
what these programs tell them. The early design of udev allowed anyone to forge a message to the kernel, which it
thought was from udev, and this allowed attackers to gain control of the system.
The Unix socket type now used can only be read and written by the two
participants in the connection.
Static
Major Number Assignment
Major device numbers are statically
assigned for the most common devices. A list of the static device numbers is
in Documentation/devices.txt
for Linux.
When all numbers are statically
assigned, you need these “official” major device numbers for any device, and
that can be difficult to learn. Some devices don’t have an official major
number in the kernel you are using. The most current list for Linux is at lanana.org (Linux
Assigned Names And Numbers Authority) or at this mirror device list.
The first Linux attempt to fix these
issues was devfs. This was a system that watched as the kernel detected
devices (a.k.a. a hotplug system). As each device was detected, an
entry in /dev was created for
it. With devfs you could simply
“ls /dev” to see what hardware was on your system.
The devfs
has a few problems. A newer version of this idea is now used for Linux: udev.
(Solaris uses a “devfs”, but it
is a better system than the Linux devfs
was.) This too has some problems but is standard on many Linux distros
including Fedora. The udev system learns about hardware by examining /sys (sysfs). Like the /proc filesystem, /sys exposes kernel data. Udev
examines that, consults its configuration files, creates entries in /dev, and performs other tasks.
Solaris has a similar system in place to manage /dev
entries called devfsadm(1M)
that gets information from /devices
(similar to Linux /sys).
Explore /sys with tree. All information is under devices. To help
find devices, a forest of symlinks is also available so you can browse devices
by bus, type (e.g. block), etc. See ls -l /sys/devices/pci0000:00/ and note the numbers and virtual devices (same slot but different “function”). “lspci -t” is a nicer way to see this information. (Experts use setpci too.)
One great advantage to this system
is that you can have udev assign device names based on vendor IDs and model
numbers, MAC addresses (for NICs), etc. So the same device gets the same
name, always. (Else a system with two NICs or several USB devices may have
each device assigned a different name in /dev
on each boot!) So you can count on eth0
being the NIC you think it is, and /dev/sdc
being the flash device you think it is. An SA can edit these rules to cause
devices to have specific names, or to run shell scripts when a device is added
or removed. This can be especially useful for virtual machines and bootable
flash disks.
Dynamic
Major Number Assignment
In a modern kernel many devices are
assigned a major number dynamically, when the kernel module (the
device driver) is determined for some attached hardware (at boot time). Using
dynamic assignment is easier (no need to register the device number with the
official kernel source) and encouraged.
The disadvantage of dynamic assignment
is that you can’t create the device nodes in /dev
in advance, because the major number assigned to some driver won’t always be
the same. However, the major number assigned to a device can be read from /proc/devices, and udev uses that information (as
well as information from /sys)
to create the device node files (/dev
entries). Even when using dynamic assignment, some major (and minor) numbers
are assigned statically, including all device drivers loaded into the base
kernel (and not available as loadable kernel modules. (Linux 2.6 and newer
have frozen the static major numbers list, since 2001.)
Linux (2010) includes a ramdisk (using tmpfs) called
devtmpfs that is mounted at /dev and populated using dynamic
major numbers. This means you have a functional system long before init runs,
so “init=/bin/sh” works well, and initramfs and init scripts can be
made simpler. Note you don’t get the power of udev at this point, just a basic
system, and no persistent device naming. When udev is started later in the
boot process, some devices get renamed. (Booting a system is an ugly process!)
[Skip the rest of the udev
section, and go to next section
(DBUS).]
Udev Configuration:
/etc/udev/udev.conf
in the main config file, used to say where the rule files are, and some default
values (say for the permissions of new entries under /dev).
Udev rules files tell udev what
names to create in /dev for
different devices, what permissions, owner, group it should have, any
additional symlinks to setup, and what additional steps should be done when the
device is added or removed (if any) (often, that means running a script or
command).
The udev rules files are read first from
the files located in the system rules directory /usr/lib64/udev/rules.d,
then from the volatile runtime directory /run/udev/rules.d,
and finally from the local administration directory /etc/udev/rules.d. This allows the administrator to
override the default rules. To disable a rules file, create a symlink to /dev/null in /etc/udev/rules.d/ for that rules file’s name.
Some (Debian) systems use /lib64/udev/rules.d
for the default rules files. That isn’t used on Fedora, but the directory
exists anyway. (Maybe used at boot time if /usr isn’t available?)
These rule files are edited when you
need the system to do something special when certain hardware is attached or
removed, when the default is wrong, or when you want some special action (e.g.,
a shell script) to run. However, some rules files are also edited
automatically, for example when a NIC is detected, udev will record its MAC
address in a rule file so that NIC gets the same name (e.g., “eth0”) every
time.
You can interact with udev directly,
using the command udevadm.
You can, for example, generate hardware update notices to see what udev will
do, or list all the hardware’s detected attributes that can be used in rules.
(Show udevadm info --query=all --name=/dev/sda.)
You can watch what udev does when hardware is detected by running udevadm monitor.
(Try that, then insert a flash disk.)
Solaris has a bunch of files in /etc with that information such as /etc/system, /etc/name_to_major, /etc/minor_perm, /etc/security/device_policy, and others. Solaris manages device names in /dev using “devfs” and the devfsadm and cfgadm commands. Usually the names in /dev are just symlinks to names in /devices.
The “*.rules”
files in the rules directory are run in alphabetical order, looking for rules
that match the detected hardware. Generally, udev stops looking after the
first match, so to over-ride the default behavior you need to create a new
rules file that gets run before the standard ones, say “00-local.rules”.
Specifying rules is complicated because
there is no usable standard for what a device reports when detected — every one
may report differently. Also there is no standard for kernel module developers
as to what to name devices. These things just grew over time as different
developers had different ideas. (It’s also complex because the udev syntax is
just plain ugly!)
An SA should be able to get new hardware working; this may
mean editing udev rules.
A udev rule contains a list of
“match” keys and “action” keys. Match keys are of the form name==value
and are used to identify a device depending on what is reported for it. All the
match keys of a rule must be true for the rule to match. The match keys try to
match the rule to the device, according to the information in the kernel event
message and the sysfs data for the device (identified by the event message).
Examples of match keys include:
KERNEL==subsystem (the
subsystem of the kernel that controls the device, such as block), DRIVER==type, and ATTRS==value (match one or more
sysfs listed device attributes).
The match rules can use pattern
matching, and the matching values are put into variables you can refer
to in the action keys.
Action keys are of the form name=value
(or name+=value if name is a list) and are used: to name the /dev entry, to set the owner, group,
and permission, to define additional symlinks, and to define a list of programs
(scripts) to run. A common action is to send a message to HAL about the new
hardware, but could be any command or program (such as a shell script that
mounts a new USB disk someplace). Note several environment variables are set
by udev before calling any program, to provide additional information to the program.
See udev(7) for a
complete list of match and action keys.
Here’s an
example rule:
KERNEL=="tty[0-9]",
GROUP="tty", MODE="0660", OPTIONS="last_rule"
(Notice the OPTIONS key that says last_rule.
This means if this rule matches, don’t look for any other rules.)
Writing rules for udev is usually not
needed; the default rules work well. You should be able to plug in a device
and the relevant node (e.g. /dev/sda
for a mass-storage device) will be there, just like in previous /dev implementations. [The following
is from: reactivated.net/writing_udev_rules.html ]
But it may be useful to create new
rules. Suppose you have two USB printers. When one is plugged in it gets
named as /dev/lp0. A more
convenient name might be /dev/printer.
By editing the correct rule you can pick your device names (or let it name the
device normally, but add a symlink with a nicer name).
Case Study: Sierra wireless 3G PCMCIA card
To get a cellular Internet connection you have to run “ifup ppp0” each time the card is
inserted. You can configure udev to automate the process. by default when the
card was detected, it created a series of /dev/ttyUSB devices from 0 through
5. To have a udev rule run the ifup command, you need to
determine a unique product ID for the device.
You can determine the information if you know the device
path (under /sys). This can be done with:
# udevinfo -q path -n /dev/ttyUSB0
You can then use udefinfo to display the
information for that device:
# udevinfo
-a -p $(udevinfo -q path -n /dev/ttyUSB0)
If you examine the output you’ll discover an idProduct key that was set to 6880 and seemed unique for this
type of card. You can use this to write the new udev rules, in the file .../rules.d/95-sierra.rules:
KERNELS=="5-1", ATTRS{idProduct}=="6880", ENV{ACTION}=="add",
RUN+="/sbin/ifup ppp0"
KERNELS=="5-1", ATTRS{idProduct}=="6880", ENV{ACTION}=="remove",
RUN+="/sbin/ifdown ppp0"
Persistent
Naming
It’s not only a convenience; it’s a
solution for persistent naming. Suppose you have two printers: a HP laser
printer and an Epson inkjet. When they are both plugged in and on, I have /dev/lp0 and /dev/lp1. Which node refers to which printer? There is
no easy way to tell. The first printer that got connected was assigned name “lp0” and the second “lp1”, but they might have been plugged
in for days (or plugged in at boot time). Not having consistent names would
mess up scripts that always expect the HP laser printer to be lp1.
However, if the HP laser printer got
named lp_hp (as well as lpX) and the other printer got
named lp_epson (as well as lpY), then scripts could just
refer to those names. Udev can control this and ensure that these persistent names
always point to the device that you intended.
For external mass-storage devices (e.g.
USB hard disks), persistent naming is very helpful in that it allows you to
hardcode accurate device paths into /etc/fstab,
or have the desktop icon say “Sans mini 8GB” instead of “Flash” or “sdb1”.
If you need to write a rule (e.g., to
automate mounting of a USB device) there are some decent tutorials on the
Internet such as at www.reactivated.net/udevrules.php.
Step 1: Gather information
to write your udev rule. Start udevmonitor
(to see the uevent details), then plug in your USB drive. You can also look at
tail -f /var/log/messages
or at dmesg output, or lshal or hal-device-manager (GUI).
You can observe the uevents passed between the kernel and udevd with udevmonitor.
See what information is reported that
you can use to identify this device. If you want to be specific, use the manufacturer’s
name and the device’s serial number. For example using dmesg after inserting my USB stick/flash/pen drive
(interesting information is in boldface):
# dmesg
usb 1-6: new high speed USB device using ehci_hcd and address 3
usb 1-6: configuration #1 chosen from 1 choice
Initializing USB Mass Storage driver...
scsi5 : SCSI emulation for USB Mass Storage devices
usbcore: registered new driver usb-storage
USB Mass Storage support registered.
usb-storage: device found at 3
usb-storage: waiting for device to settle before scanning
Vendor: SanDisk Model: Cruzer Titanium Rev: 2000
Type: Direct-Access ANSI SCSI revision: 00
SCSI device sdb: 1014784 512-byte hdwr sectors (520 MB)
sdb: Write Protect is off
sdb: Mode Sense: 43 00 00 00
sdb: assuming drive cache: write through
SCSI device sdb: 1014784 512-byte hdwr sectors (520 MB)
sdb: Write Protect is off
sdb: Mode Sense: 43 00 00 00
sdb: assuming drive cache: write through
sdb: sdb1
sd 5:0:0:0: Attached scsi removable disk sdb
usb-storage: device scan complete
Note the USB bus id shown first (1-6).
Use that to see the device information:
cd
/sys/bus/usb/devices/1-6; ls
cat manufacturer serial
Another way is to look there for the
file usb_device:name (in
my case it is usbdev1.3). Use
this to get all sysfs information that may be used with udev:
udevinfo
-ap /class/usb_device/usbdev1.3
Many blocks of data will be reported,
for each sub-device (the USB bus device, the PCI bus device, etc.) One block
will obviously be for your specific device. You can use any of that
information to identify the device in your rule.
Here’s the
abbreviated output for my flash drive with the most useful data in boldface:
follow the "device"-link to the physical
device:
looking at the device chain at
'/sys/devices/pci0000:00/0000:00:1d.7/usb1/1-6':
BUS=="usb"
ID=="1-6"
DRIVER=="usb"
SYSFS{bConfigurationValue}=="1"
SYSFS{bDeviceClass}=="00"
SYSFS{bDeviceProtocol}=="00"
SYSFS{bDeviceSubClass}=="00"
SYSFS{bMaxPacketSize0}=="64"
SYSFS{bMaxPower}=="100mA"
SYSFS{bNumConfigurations}=="1"
SYSFS{bNumInterfaces}==" 1"
SYSFS{bcdDevice}=="2000"
SYSFS{bmAttributes}=="80"
SYSFS{configuration}==""
SYSFS{devnum}=="3"
SYSFS{idProduct}=="7108"
SYSFS{idVendor}=="0781"
SYSFS{manufacturer}=="SanDisk Corporation"
SYSFS{maxchild}=="0"
SYSFS{product}=="Cruzer Titanium"
SYSFS{serial}=="00000000000000217115"
SYSFS{speed}=="480"
SYSFS{version}==" 2.00"
Step 2: Decide what /dev name you would like to use. /dev/flash0, 1, ... or /dev/cruzer,
/dev/SanDisk-titanium, ... You
can have additional symlink names. Note by default interesting symlinks are
created in /dev/disk.
Step 3: Create an
appropriate fstab entry,
specifying some mount point and mount options, for the device name you picked.
Most flash drives are vfat and common options include user=, uid=,
gid=, mode=, nodev,
noatime, and others. Be sure to
actually create this mount point if you want the device to be automatically
mounted when inserted. Otherwise, chose a mount point under the control of an
auto-mounter.
Step 4: Create your rule
in the file /etc/udev/rules.d/00-local.rules,
which you may have to create. This rule can include a shell script to run.
The script in turn adds/removes icons from your desktop, and possibly
mounts/umounts the device too (if no auto-mounter is used). Udev can but shouldn’t
mount anything. It is better to use HAL or an auto-mounter.
The script will be passed information
in environment variables that say if the device has just been added or
removed. My rule used the default kernel name for the disk but adds a symlink
for /dev/cruzer#:
BUS=="usb",
SYSFS{manufacturer}=="SanDisk Corporation",
SYSFS{product}=="Cruzer Titanium", SYMLINK+="cruzer%n",
OPTIONS="all_partitions", RUN+="pathname_to_script_or_program"
(all one line). The script or program
is passed an environment variable saying if the ACTION was ADD or REMOVE, and
other information. You can test your new rule(s) with:
udevtest /block/sda/sda1 usb
D-BUS
D-BUS (or dbus) is a simple IPC
(interprocess communication) protocol that allows asynchronous messages
be either directly sent between two applications (peer to peer
model), or be “broadcast” (routed among multiple applications; this is the hub
model). In other words, D-BUS manages a system-wide message bus.
Processes can listen for and/or send messages to other processes. You can
easily set up multiple busses so sets of processes can talk to each other.
Until D-BUS, applications could only communicate and
cooperate using pipes, sockets, shared memory, and file systems (shared files
or named pipes). Usually only two applications could communicate with each
other; no broadcast, and a lot of setup and programming support is needed.
The various hub buses use dbus-daemon processes as message
routers to forward the messages back and forth (the peer to peer model buses don’t
need a daemon.)
There are two standard hub buses that a
developer can rely on always being around. These are the system bus and
the session bus.
The system bus can be used by
any application running in any context to post or receive messages. It is a
single point where applications can export services that anyone can
use. Only one system bus daemon can be run at a time.
The session bus is local to the
current user’s X session. It is used for communication between applications
running within the same GUI session. For every login to X, one session bus
daemon is started.
A modern *nix system uses the D-BUS session bus to
“post” hardware change events, replacing older mechanisms such as CORBA (Used
by old Gnome) and DCOP (used by old KDE). Desktop applications can then
refresh the desktop icons or “pop-up” messages.
Every bus has an address describing how
to connect to it. A bus address will typically be the filename of a
Unix-domain socket such as “/tmp/.session”
but it may also be a TCP port where a bus daemon is listening. All D-BUS
functionality is encapsulated in libdbus.so.
The library is used directly for peer-to-peer communications or to connect
with some bus (hub). Each application that connects to a bus must provide a
unique (to that bus) service name so other applications can communicate with
it. (They will need to know that name before they can talk to that
application.)
D-BUS messages have a header (the
sender bus name, destination bus name, message type, etc.) and a body.
Each D-BUS hub bus has an XML config
file (documented in dbus-daemon(1))
that specifies the user the daemon should run as, the socket to listen on,
various resource limits (e.g., the max size of a message), the location of
other config files (e.g., each service can have a config file which
would allow D-BUS to start an application automatically when a message is sent
to its service name), and a security policy that controls the communications,
and other information. Since one config file can “include” others, it is common
to put the security policy in a separate file.
D-BUS configuration is located in /etc/dbus directory and consists
of several XML files, but D-BUS just works. An SA shouldn’t need to mess with
it.
You can use some command line tools (dbus-* and gdbus) to send and receive messages. (Demo: “dbus-monitor
[--system]”.)
More information can be found in the
tutorial at: dbus.freedesktop.org.
Lecture
15 — Methods of System Configuration —
Admin Tools, Basic Security
All admin tools just
edit various text files. (In the old days, we just had scripts to
hand-edit. Now scripts read/write text (and XML) config files, so GUI tools
are possible.) Having human-editable config files is a core Unix philosophy,
so SAs can “tweak” any “config” file, easily read them, and use standard tools
such as grep and awk on them. (Compare this to Windows
registry.)
Most *nix config files
have this format: blank lines comment lines that start with the “#” character), and NAME=VALUE
lines (no spaces around the equals sign; values with spaces or strange
characters can be quoted). The result is that such files can be sourced
by shell scripts. On Sys V init-based systems, the scripts in /etc/init.d/ (and sometimes /etc/profile) will source these files;
Red Hat like systems usually put these files under /etc/sysconfig/. (The systemd init system also reads
these files, but doesn’t use shell scripts and thus doesn’t need to source the
files. You can see which files are read by examining the unit files in /lib/systemd/system and /etc/systemd/system.)
DOS also had text admin
files called *.ini files, which
all used a common syntax that made it easy to administer. Some *nix daemons
have INI-like config files as well.
The INI file syntax was never
standardized, and various tools and Windows libraries over the years had
conflicting rules. Few Windows programs use INI config files anymore. Instead,
configuration settings and data are stored in a non-text database called the system
registry. Qu: What are some problems with that?
AIX is an exception. AIX uses the Object Data Manager
(ODM) for managing devices and configuration files. While most *nix systems
depend on editing text-based configuration files, AIX stores that information
in the ODM. You can picture the ODM as a database system built into the
operating system—in other words, a system registry.
(1) vi and man pages. Since all configuration information is
stored in text files, you can use any editor to manage a *nix system. Using vi is common. The format and options
available in config files used by many services are documented in man pages (in
the “file formats” section), or in /usr/share/doc/*
files.
The first place to turn
when looking at or editing these files is to check for a man page. Especially
learn the man sections for file formats and admin commands. (Q: which are
these? A: 5 and 8 (1M for Solaris) and others.) Demo man fstab,
hosts, hosts.deny.
In addition to editing
existing files you may have to create and rename files or create links to
perform administration. You use standard file tools: mv, ln,
.... (E.g., create symlinks, vi
inittab and rc.* scripts.)
(2)
GUI tools are a good way for “newbie” SAs to administer a system, since
many of the command line tools needed will have strange names (especially on
different versions of *nix) and the files to edit may not exist on some
systems. Using a GUI will guide the SA through the various admin tasks and
even show what tasks may need to be done.
Some commonly used GUI
tools include system-*
for RH (e.g., ...network-gui), YAST for SuSE, AdminTool and SMC for
Solaris (port #898) , linuxconf
(Mandrake; port #98), smit for
AIX, and my favorite webmin
(http://localhost:10000/).
Webmin uses the exact same GUI for all versions of all *nix systems. It is
also extendible with custom GUI tasks. Like Solaris SMC, webmin is accessed
via a web browser.
Eventually you will
“advance” to administering servers via SSH command line. Running a GUI admin
tool on a remote server can be insecure, slow, or not work at all. You will
thus need to know the files modified by the GUI tools so you can edit them via vi or cmd-line tools yourself later.
An easy way to figure out what a GUI tool does is to run it, then find all
files it modified. (You can even compare before and after versions of config
files with diff, to see what the
tool did.)
Use find to locate files modified by
GUI (or other) tools:
find / -path '/proc' -prune -o -path '/var/spool' -prune
\
-o -path '/home' -prune -o -mmin -5 -print 2>/dev/null
(In class task: Using
only GUI tools, name your machine YourName.gcaw.org. You must
figure out which tool to use yourself: webmin, linuxconf, smit, admintool/SMC,
...) What files were updated by those tools?
When managing multiple servers (perhaps your site hosts
virtual web servers), a good GUI tool can be very useful. Commercial tools
such as Parallels Plesk
or cPanel, and open source ones such as ISPconfig, or zpanel are common.
(3)
cmd-line tools: These do the same task as the GUI tools, that is, they edit
text config files, and they are scriptable. Some cmd-line tools are
platform-specific such as chkconfig
and system-config-services for
Red Hat like systems. Others are open source tools ported to all platforms
(ex: tune2fs). Many cmd-line
tools are common to all systems except they may take slightly different options
on different systems (compare passwd,
useradd on Fedora, Solaris).
For example, to manage
which services start at boot time on RH systems use:
chkconfig [--level levelslist] servicename
{on|off|reset | --list}
(Works for xinetd.d/* services too.) In each servicename
script are special comments called tags; See /usr/share/doc/init*/sysvinitfiles
(on website, in resources) for details. There are two required tags:
# chkconfig: levelslist|- startPriority stopPriority
# description: description of
service goes here
Generally stopPriority = 100 - startPriority. The
description can be several lines long, each but the last continued with '\' at
the end. Initial shell comment character and any addition whitespace on the
following lines are ignored. There are a bunch of optional tags as well.
The LSB requires different tags; Fedora’s chkconfig understands both types.
LSB
init script tags: These appear in a block delimited by the
comments as shown. Each tag starts with “#” in column 1, a space, and then the
tag name.
### BEGIN INIT INFO
# Provides: facility
... (e.g.: $network $named)
# Required-Start: facility
...
# Default-Start: runlevel
... (e.g.: 3 4 5)
# Default-Stop: runlevel
... (e.g.: 0 1 6)
# Short-Description: Some
one line description
# Description: A longer
possibly multi-line
# description, with extra
leading spaces marking
# continuation of the
description.
### END INIT INFO
Additional tags are defined as well: Required-Stop, Should-Start, and Should-Stop. The facility names
are registered by lanana.org.
Debian based systems have update-rc.d (not as useful, but
there are alternatives). The LSB standard tool is install_initd (look in /usr/lib64/lsb
on any Linux distro). Solaris uses svcadm.
An SA must know all
methods: files for maximum control (and always works), cmd-line tools for
scripts and standard tasks (e.g., useradd),
GUI when you need help (or when file syntax is hard or complex). Also all this
information is testable on various certification exams. While a vendor cert.
exam usually only includes that vender’s tools, a good SA needs to know more. (LPI
cert. covers all distros of Linux, and so covers lots of tools.)
Red Hat has a suite of command line configuration tools
named system-config-*. Solaris’ suite, called sysidtool, contains tools
named sysid*. Some of these tools are invoked at system installation
time, or after a system has been unconfigured (i.e., restored to the “as
manufactured” state). RH systems also invoke tools named *config (and others) at installation time: passwd (to set root password), netconfig, timeconfig, authconfig, etc.
To un-configure a system on Solaris run sys-unconfig (S11: sysconfig). This creates the
file /etc/.UNCONFIGURED. On RH systems you merely need to touch (create) the file /.unconfigured. Then
reboot. Other special RH files include /fastboot, /fsckoptions, /forcefsck, /.autofsck, and /forcequotacheck. (See /etc/rc.d/rc.sysinit and kernel-command-line(7).) Note
that systemd doesn’t honor all these, notably the fsck ones. (Their thinking
is, why would you want to create a file on a suspect storage volume?)
Port numbers and network services:
An IP address identifies a
computer (host) on a network. But when a packet of data arrives at some host,
how does the kernel know which program (which daemon) should receive it?
Daemons and (client programs such as web browsers) inform the kernel that they
are listening for packets addressed with a particular port number.
For example when the web service daemon starts, it informs the kernel it is
“listening” on TCP port number 80. When the web browser sends an HTTP request
packet to a web server, the packet includes the source IP and port number of
the web browser (which may have more than one assigned, say when multiple
windows are open) and the destination IP and port number of the web server.
Any daemon can listen on
any port, but to make communications easier there is a list of well-known
port numbers maintained by the IANA. (So if you configure some service
daemon to listen on an unusual port number, only clients that know that port
number will be able to connect to your service.) A copy of this list can be
found in the file /etc/services.
In that file, the port numbers are also given names.
Many programs can use /etc/services to translate service
names to port numbers, allowing humans to use the names in commands and
configuration files. However if your daemon configuration only uses the port
numbers, then that file is not used in any way by that daemon.
It is a common miscomprehension by new SAs that commenting
out lines in this file somehow turns off services. A few might indeed be
broken if they used service names in their config file(s), but you should not
use this file to control which services are enabled on your system!
To see “open ports”
(listening services), as root run one of these: nmap
localhost, lsof -i|grep LISTEN,
or netstat -nl46.
Review Unix/Linux Security:
Review basic Unix/Linux
files, directories, and inodes from CTS-1106.
Discuss permissions for
files and directories, SetUID, SetGID, sticky/text bit. Point out web resource
for this.
Use setGID (and possibly
the sticky bit) to create a workgroup directory.
chmod [augo]{+-=}[rwxXstugo]:
+X means to add x if the file is a directory, or has x for someone. g=u means to copy owner perms to
group. Can use up to four octal digits too, plus leading zeros. First digit:
4=SUID, 2=SGID, 1=sticky. Other digits: 4=read, 2=write, 1=execute (search on
a directory).
Examples:
chmod
640 file...
chmod -R a+rX .
chmod u=rwx,go+r file
Mention (only!) other
security systems: ACLs, FS-specific attributes, TCP Wrappers, Firewalls,
PAM, SELinux, etc.
Trouble-Shooting
Security Problems
There are many security
subsystems on a *nix system, including permissions, file attributes, MACs such
as SELinux, ACLs, PAM, and others. Sometimes even root can’t do some task or
modify some file!
An entry-level SA is not
expected to find and close security vulnerabilities. However, when some access
is denied many new SAs attempt to “solve” the problem by adding too much
permission to some file or command. Resist the temptation to make your
files readable (and worse, writable) by everyone!
Finding mis-configurations
and fixing them correctly is more of an art than a science. If possible, watch
a senior SA solve the problem. Don’t be afraid to ask that SA why they did
what they did, and why they didn’t try something else first. (However, watch
out for becoming a pest or you will learn nothing more from that SA!)
First check that you’re
root or a user that is supposed to have access. Next check permissions. Many
packages install files with incorrect permissions (or group or owner) set. Be
sure to check directory and ancestor directory permissions (often affect user
web sites).
Next check log messages,
especially if SE Linux (or another MAC) is in use. These may need to have the
security policy they enforce tweaked. Next check the system journal to see
what was done recently. That often provides a clue.
Finally look for strange
stuff: ACLs, attributes, mount options, PAM settings, and signs of attacker
activity.
Lecture
16 — The System V (Sys V) Init System,
Systemd, Upstart, ...
The main purpose of an init
system (and the init daemon) is to bring up the system and to manage the
services on the system. Here we focus on managing services and daemons.
Services on your system are
implemented by daemons: processes not associated with user sessions. There are
different ways to implement these daemons, and thus different ways you need to
manage them.
A stand-alone service
is one that the daemon for that service is started at boot time (or on receipt
of the first service request). That daemon handles all requests, so you
typically only have one such daemon running on your system. Examples include
MariaDB, httpd, CUPS, sendmail, etc. Since you only run one of these, such
services are also called singleton services.
An on-demand service
is one where a new instance of the daemon is started for each new request.
Such daemons are designed to only handle a single request, then terminate.
On-demand services are useful when a service isn’t needed often and thus it
would be a waste of resources to keep a stand-alone daemon running all the
time. Examples include FTP, NFS, iscsi, talkd, etc. These are sometimes also
called per-connection or per-instance services.
Another difference between these is that if some daemon
takes a long time to start, it is usually implemented as a stand-alone daemon.
On-demand daemons must start quickly in most cases.
Run-Levels
(a state that defines which daemons to start; switching run-levels will
turn on some services, others off). The who -r command tells you the current
and previous run-level, telinit
(or init) level to switch. (Linux has runlevel too.)
A daemon is a service process that runs in
the background and supervises the system or provides functionality to other
processes. Traditionally, daemons are implemented following a scheme
originating in Sys V Unix, and are started and stopped via “init” (shell) scripts.
(Prior to that, init started/stopped daemons itself; an SA would need to change
run-levels.)
See the daemon(7) man page for more
information.
Standard run-levels:
Depends on flavor of Unix. Some provided only single user mode and multi
user mode. Linux supports “Sys V init”, which allows up to 10 run-levels:
0=shutdown, 1=single-user (maintenance) mode, 6=reboot. Others are up to you.
(RH: 3 and 5, Solaris: 2 and 3, Ubuntu: 2 and 3 are used. Demo changing GUI
bootup vs. non-GUI, Show /etc/init.d/rwhod
script.)
The LSB defines these run levels, used in Red Hat but not
all Linux distros yet:
0 halt
1 single user mode
2 multiuser with no network services exported
3 normal/full multiuser
4 reserved for local use, default is normal/full multiuser
5 multiuser with a display manager or equivalent
6 reboot
Sys V init System
Booting
is controlled by the init
program. This is the only program started by the kernel after a boot. Sys V
init uses /etc/inittab to
determine what the default run-level is, and (for the selected run-level) which
programs to start. Typically this includes a program “rc” that is passed the run-level as an argument, and that
in turn runs a set of shell scripts (known as “init scripts”) that each
starts one service.
Originally daemons were written to be run as root by init. Today they are generally
designed to be started by init as root. Then they access privileged resources, drop privileges,
start an un-privileged process, and then exit.
/etc/init.d lists which daemons
are available. The daemons to start/stop in any run-level x are
controlled by symlinks to these scripts, in directories rcX.d (X=[S123456]).
On BSD these directories are found in /etc/rc.d.
For other systems they are in /etc.
Not all daemons provide network services! Some daemons
just provide support to local applications. Also on-demand services (e.g.
FTP) are controlled by [x]inetd or systemd instead, and have no long-running, stand-alone daemon.
Details of inittab
entries: label:runlevels:action:command. run-levels:
0–6 (0–9 for some versions), A–C. To start a daemon use actions once, wait,
or respawn (or the special
actions: sysinit, ctlaltdel, powerfail, and initdefault).
In olden days to have a service start you just added a line to inittab.
Nowadays inittab is rarely edited. Instead links
in the various rcx.d
directories are created/removed. Important: How to work on strange new
system: start with inittab and fstab (or vfstab on Solaris). The order daemons run is
determined by the names of the symlinks to the init.d scripts. Scripts
used to start daemons have names that start with S. This is followed by a two-digit
number, then the name of the script. The number thus determines the order in
which the scripts will run. When stopping services the symlinks that begin
with K are used instead, so you can control the order. (SuSE only uses S links,
a better method IMO.) When the new run-level is greater than the previous, the
S links in the new run-level directory are run; when the new run-level is
lower, the K links are run.
While SysV init has been a
workhorse for Unix/Linux for over 25 years and is relatively easy to
understand, it does have problems: starting/stopping services that depend on
other daemons doesn’t automatically start/stop them; automatic restarting of
crashed servers (init does that
but only if you use respawn, and
most daemons aren’t designed for that anymore), starting services when certain
events are noted (e.g. a wireless network was detected), etc.
Furthermore the system requires
lots of manual configuration (such as picking the numbers for the S- and K-
symlinks). Also different configuration files and administrative commands and
procedures are required for stand-alone services (such as HTTPD) versus on-demand
services started by inetd (such
as FTP), discussed below.
A number of replacements
for Sys V init have
surfaced in recent years. These systems replace some or all of init, rc
(and related rc scripts), inetd and xinetd, cron
and at, watchdog, and the various administrative commands that
use these services (crontab, chkconfig, ...). Note any replacements
for Sys V init are generally
backward compatible so init.d
scripts will still work.
In essence, these
new-style init systems starts daemons at boot time as Sys V init did, or by one
or more activation mechanisms such as socket-based activation
(starts daemons upon arrival of first inbound packet of data), D-Bus-based
activation (Often used by GUI programs to start daemons on demand), device-based
activation (start/stop daemons when hardware is plugged-in/unplugged), path-based
activation (stars daemons when some filesystem change occurs, for example,
a printer file appears in a spool directory), and timer-based activation.
Even for daemons started unconditionally at boot time, configuration is simpler
as the system can determine the order to start/stop daemons automatically.
Some replacements are
Apple’s launchd (for
MacOS; see ch.5 of arstechnica.com/reviews/os/macosx-10.4.ars), Linux upstart,
and Solaris SMF. Upstart
makes use of “D-BUS”, a service
and event notification system.
Gentoo Linux augments
the standard Sys V init scripts with extra dependency information. Each script
includes a “depends()” function that contains information about what this
service needs, what it wants (but doesn’t necessarily need), and what “service”
it provides. Then, when starting or stopping services the other services it
depends on or depend on it are started/stopped, in the correct order. See the Gentoo
handbook, part 2 ch. 4.
Crontab
and Periodic Processes
Review crontab, at.
Discuss anacron (BSD: periodic). Review common uses: backups, updates, log
file rotation, reminders, monthly (or other) report generation, system and
service monitoring (e.g., is the web service up and running?).
Upstart [Skip to Systemd]
(See upstart.ubuntu.com and Ubuntu Bootup Howto)
Upstart is a new Linux init daemon replacement in most modern distros. Upstart
allows daemons (called jobs)
to be started in response to events rather than by run-levels. It also has
support for monitoring services and restarting them when they go awry, like
init’s respawn only smarter. (If a daemon respawns too frequently it gets
disabled. SMF does this even better.)
Using events means services
that depend on another will be started in the correct order (the second service
can wait for an event from the first.) Each job waits for some event to
start/stop, and when fully started may emit other events (in case other daemons
are waiting). (Of course, it is important to standardize the events or one job
will emit “network up” while another waits for “networking up”.)
Upstart is completely
compatible with Sys V init so all your old scripts still work as normal. This
was done by having the system emit a run-level event every time the run-level
changes. (Note init scripts can emit events, but currently none do.)
The jobs are defined in /etc/event.d (/etc/init on Ubuntu.). Generally
there is one job for each run-level, which runs rc level. Each job file lists
the events that start and stop it, the command(s) to run, if it should be
monitored (“respawn”), and other stuff. An event can be any string but no job
will be waiting for a random one. (Job files are described more fully below.)
The compatibility for Sys V init is annoying since (at
least on Fedora up to F14) only the run-level events are used, so you still
have to manage the rc.d directories and symlinks, and get the numbers right to
control the start order. Hopefully the project will define a bunch of other
standard events such as “network up” in the future and migrate the init.d scripts into event files.
On Ubuntu and most non-RH
distros, numbers are not used to control the order of starting and stopping
services. Instead, the dependencies are calculated based on which services you
have enabled, for each run-level. The services are started in that order.
This has an advantage over the RH scheme: services that don’t depend on each
other can be started in parallel.
Here’s how this works:
Services (daemons) have scripts in /etc/init.d
to start and stop them (just as for RH). These service scripts have special
comments, the LSB header, that define which run-levels the service should start
on, stop on, and/or which system facilities the service depends on. System
facilities are just names such as “networking” or “DNS”. (These may be defined
in /etc/insserv.conf, on some
systems. Each definition lists the system facility name and the service
daemon(s) that define it on your system; e.g., “DNS” might be provided by “named”
or “djbdns” or some other daemon).
When the system changes
run-levels (such as at boot time), init
reads all the LSB comments of all the scripts and determine which services
should be started/stopped for the new run-level, and which ones depend on which
other ones. (For example if the Apache server httpd’s
script says it depends on DNS, then named
will be started before httpd.) init then starts and stops the
services in the right order.
Note some services (in the
future) may not have scripts in /etc/init.d,
only Upstart job files (in /etc/init).
In this case a symlink to the job file is placed in /etc/init.d, and init
is smart enough to tell the difference and to determine the system facilities
the job file requires, without any LSB header comments (? not sure about
this part; insserv did this but that is gone from F14).
Upstart
job files and events
The
full syntax for job files (often—and confusingly—called scripts or event
files) can be read from the online man pages (it is slightly different
between distros). See init(5)
man page for a description of the event file format for the RH version of
Upstart. Job names are the relative pathname of the job file (minus the
required .conf extension)
starting from “/etc/init/”. Here’s
an example of an Upstart job file for RH that’s triggered when the run-level
changes to 2:
start on runlevel 2
stop on runlevel [!2]
console output
script
set $(runlevel --set 2 || true)
if [ "$1" != "unknown"
]; then
PREVLEVEL=$1
RUNLEVEL=$2
export PREVLEVEL RUNLEVEL
fi
exec /etc/init.d/rc 2
end
script
This job file runs the init.d/rc script with argument “2”, when a runlevel change event occurs.
Job files can be even simpler. The following job is triggered by an event I
made up (you can define your own), called bounce
(/etc/init/bounce.conf):
start
on bounce
exec printf '\n\n\t--Bounced--\n\n' |wall
The first line defines
which event triggers the script; the second defines the command to execute.
To generate an Upstart
event, use the initctl
program:
#
initctl [--quiet] emit bounce
--Bounced--
Use initctl to view and manage the
jobs that Upstart is managing. (Some jobs are started but not managed, and
won’t show up with this tool.) You can start, stop, and get the status of jobs,
and “emit” events. Other tools such as telinit
and init can be used as before,
only now they merely emit run-level change events.
To start a job: initctl start job ...
To stop a job: initctl stop job
...
To see the current status of a job: initctl
status job ...
To see a list of jobs: initctl
list [glob] #shell wildcards OK
(This shows the job status too, as well as the PID of any running task. So no
need to maintain PID files in /var/run.)
To emit some event: initctl
emit string [arg ...]
(Demo: initctl emit ham
and eggs)
Some typical jobs on a
running system might be:
#
initctl list
control-alt-delete
(stop) waiting
logd
(start) running, process 2347
rc-default
(stop) waiting
rc0
(stop) waiting
rc0-halt
(stop) waiting
rc0-poweroff
(stop) waiting
rc1
(stop) waiting Runs the /etc/rc.d/rc script on a runlevel event
rc2
(stop) waiting
rc3
(stop) waiting
rc4
(stop) waiting
rc5
(stop) waiting
rc6
(stop) waiting
rcS
(stop) waiting Runs once at startup (system boot) time
rcS-sulogin
(stop) waiting
sulogin
(stop) waiting
tty1
(start) running, process 4418 Virtual CLI consoles
tty2
(start) running, process 7367
tty3
(start) running, process 7368
tty4
(start) running, process 7369
tty5
(start) running, process 7370
tty6
(start) running, process 7371
Use
the following shell script to see which events are used on some system:
grep -v '^#' /etc/event.d/* \
| grep -E '(start|stop) on' \
| sed 's/^.* on \(started\|stopped\)\? *//' \
| sort -u
(You can grep LSB init
scripts for “Provides:” to list
the facilities used on a RH system; non-RH systems list these in /etc/insserv.conf.)
The “standard” events in
Fedora 14 include startup, runlevel n, and job-name starting|started|stopping|stopped.
Upstart doesn’t use /etc/inittab for much anymore. On
Fedora it is used only to determine the default run-level. (With other systems
look for an event file rc-default; /etc/init/rc-sysinit.conf is used by Ubuntu.)
A number of settings for control of the init process are in
/etc/sysconfig/init. This file has several useful options you can set:
·
BOOTUP=verbose (default is color, which is just green OK or
red FAIL. Other options include verbose or something else (e.g., NO_COLOR). This last will produce cleaner boot log files.
·
LOGLEVEL=1–8 where the number sets the initial console logging level
for the kernel. The default is 3; 8 means everything (including debugging); 1
means nothing except kernel panics. The syslogd daemon overrides this
setting once started.
·
PROMPT=yes|no (default is no) If yes the system will ask if it should do fsck, and check if
you’ve hit the key for interactive startup. You can instead add forcefsck and/or confirm to the kernel parameters
(via the boot loader).
·
AUTOSWAP=yes|no (default is no) If you change this to yes,
your system detects swap devices automatically. Using this option means that
you don’t have to mount swap devices from /etc/fstab anymore.
·
ACTIVE_CONSOLES=/dev/tty[1-6] This line determines which virtual consoles are created.
Be aware that you should never use tty[1-8], because tty7 is reserved for the graphical interface.
·
SINGLE=/sbin/sushell This line can have two parameters: /sbin/sushell (the default) which drops you in a root shell after starting
single-user mode, or /sbin/sulogin, which launches a login prompt where you have to enter the
root password before single user mode can be started.
There are plans to allow Upstart to replace cron and at, and allow user-defined event scripts. Also to
eventually get rid of run-level scripts. Unfortunately, there don’t seem to be
any standard event names script writers can count on for standard/common
events.
Systemd
Fedora and most other Linux distros switched from older init systems
to a new one called Systemd.
It very different from sys V init or Upstart; see fedoraproject.org/wiki/Systemd
and systemd(1)
for more complete information.
As of 2021, there are still actively-maintained Linux
distros that don’t use systemd: Devuan (a
fork of Debian), Artix (a fork of Arch),
and PCLinuxOS (a Red Hat-like fork of Mandrake/Mandriva).
Upstart is event-driven. Once the network is up, a “network is
up” event is broadcast and any services waiting for that start next. In
contrast, systemd is socket-driven. Nearly all services start at once.
If some service such as httpd
needs network information, it asks for it via a socket, which will buffer such
requests until the required service is ready. When it is, systemd hands the
socket over to the daemon. The network daemon for example can read the backlog
of requests and handle them.
Starting everything at once is more efficient. (Apple’s launchd for Mac does that too.) A
further benefit is that if you restart networking, no other services lose their
connections; systemd maintains the socket until the service has restarted. (In
the few cases where the order of service startup matters, systemd can handle
that.)
Systemd also handles directly on-demand services, so [x]inetd is no longer needed or used. Configuring on-demand
services via systemd is only a little more complicated than under xinetd.
Besides managing services and their sockets, systemd handles
internally many chores traditionally handled by RC scripts invoking other
utilities, including managing devices (systemd talks with udev), user home
directory creation (systemd makes sessions for user logins), daemon
logging, mounting filesystems, fsck
checking at boot time, and many other tasks. These are handled using more than
40 new programs. (See these new binaries by looking in /usr/lib/systemd/*, or /lib/systemd/*
on older systems.)
Note: Most 64-bit Linux systems using systemd install that
in /usr/lib64/systemd. Fedora 27 and older seem to be exceptions in that they
put the 64-bit systemd in /usr/lib/systemd. I will use the
Fedora location in these notes.
Systemd also runs a daemon to track each login session. Doing so
enables systemd to offer additional new services and features, such as persisting
user sessions, cleaning up all processes when a user logs out, and even
starting services only when a particular user logs in (and turns it off when
they log out, so-called user-services). These user session daemons make
take a while (1-2 minutes) to run when you power-off a computer without logging
out first. (You see messages about a “stop job running for user.)
All these changes apparently defy the “Unix Philosophy” of
have programs do one thing only. Systemd will require many changes to how sys
admins manage, monitor, and trouble-shoot their systems, but it is hoped that
the new way will be better and easier in the long run. (In related news,
FreeBSD and OpenBSD (both using Sys V init) have reported unprecedented
adoption rates after Red Hat switched to systemd; FreeBSD deployments are
estimated at 5 million production servers in 2014.)
The main limitation of systemd is that, because it handles
daemons in a non-traditional way, daemons need to be made “systemd” native
(that is, to work with sockets and not events as with Upstart). A problem (2016)
with systemd is that it is poorly documented. This situation is slowly
improving, with systemd now documented via roughly 70 man pages (which makes it
hard to find something if you don’t know which page it is in).
To see the systemd-related utilities, run:
$
rpm -ql systemd |grep /bin/
(Plus the binaries in “/usr/lib/systemd/”.)
“Systemd is an all-singing, all-dancing uber-daemon, not
just a replacement for sys V init. It [does] all sorts of things like logging
that used to be done by separate daemons, and does them in an incompatible way,
as well as providing new services that the Freedesktop people consider
essential. As time goes on more and more major packages will require systemd
features. Any distribution that does not switch to systemd will have to either
add support for those features to their init system or patch the packages.”
-- John Hasler
Systemd handles many tasks traditionally done via RC scripts,
using compiled C programs instead. There is only limited info available via
man pages for those, making it difficult for a sys admin to know what options
to include in the GRUB command line to, say, force an fsck check to be done at boot time. (As of 2014; see systemd-fsck(8) for example. The man
pages are getting better as the pace of changes to systemd slows.)
While Upstart was designed to be compatible with Sys V
init, systemd is not (but it supports legacy Sys V init scripts anyway).
However, that implies all packages must be made systemd-compatible or not be
used by Red Hat like distros; in other words, nearly all of them. And
systemd-compatible daemons cannot be run (without patches) on a non-systemd
system.
Native systemd configuration files (or units) describe
all the activities when booting a computer, from hardware detection and
configuration, disk mounting, and service startup. Unit files are supposed to
be easier to understand, create, and configure, compared to sys V init shell
scripts. There are different types of unit files, distinguished by their
extension. The units that manage daemons are “.service”
units.
On-demand daemons have a .socket
unit, which creates a .service
unit file per connection, from a template service unit file (name
ends with “@”). Show
telnet.socket and telnet@.service files. If I run telnet localhost twice, here’s the result:
$ systemctl
|grep ^telnet
telnet@2-127.0.0.1:23-127.0.0.1:49922.service loaded active running
Telnet Server
telnet@3-127.0.0.1:23-127.0.0.1:49923.service
loaded active running Telnet Server
telnet.socket
loaded active listening Telnet Server
Activation Socket
Template service units can use many variables that get
substituted when the actual service unit is created from the template. This
makes template service units very powerful and flexible.
To use a stand-alone service, you must start the service. (And
systemd will automatically manage the socket.) To use an on-demand service,
you must start the socket. (And systemd will automatically start a service
process per connection.) To have either type of service available at boot
time automatically, you enable the service or socket.
Systemd supports a delayed stand-alone service with sockets
as well. For example, the stand-alone CUPS service isn’t started until the
first print request is made.
Stand-alone daemons can also use sockets created by systemd, if
desired. Also, if you want a single daemon to handle multiple connections,
instead of one connection per process, you can use a regular service unit file,
not a template one. Having systemd create the network connections, then pass
them to daemons means you don’t need to allow daemons any network access; they
only use their socket. This increases the security of the system (by preventing
a corrupted daemon from opening a back door to your system).
The systemd init system reads the older Sys V init config files
(mostly under /etc/sysconfig/)
for services that haven’t been converted to unit files. You can see which
files are read by examining the unit files in /usr/lib/systemd/system
and /etc/systemd/system.
Sys admins will need to remember that the config data is
not only in /etc/ files, but also in /usr/lib/systemd/system/ and in /run/systemd/system/. Those should not be changed locally (by the admin), although
the /usr/lib ones may change between systemd updates. So that directory
needs back-ups just like /etc (in case an update breaks
something and you want the old unit file back).
Systemd uses .service
files (look in /usr/lib/systemd/system/
for *.service). (Modern Fedora
system use symlinks for /bin and
/lib to /usr/*.) If you add new (or modify existing) service
files, they go into /etc/systemd/system/,
not /lib/systemd/system/. Any
unit files in /etc override
those from elsewhere.
There is another place too: unit files found in /run/systemd/system will override those from /usr/lib. The ones
found in /etc override everything. The ones under /run go away at next boot, since that is (supposed to be) a RAM
disk.
A common case is when you only want to override one item (a
command line argument, perhaps) and not a whole unit file. Systemd supports
that too: create the directory /etc/systemd/system/nameofservice.d.
Any files in there will be merged into the unit file. Systemd refers to those
as dropins. An easy way to create the directory and file is by running
the command “systemctl edit [--runtime]
servicename”. (The “--runtime” option says to put the
dropin under /run, not under /etc.)
A sample service unit file looks
like this:
#
cat ntpd.service
[Unit]
Description=Network Time Service
After=syslog.target ntpdate.service
[Service]
EnvironmentFile=/etc/sysconfig/ntpd
ExecStart=/usr/sbin/ntpd -n -u ntp:ntp $OPTIONS
[Install]
WantedBy=multi-user.target
Notice how it looks like an old-fashioned INI file. While a unit
file can contain a lot more information than this, notice the dependency
information in the [Unit]
section (“After=”). The WantedBy line says when to start this
service, and allows you to enable and disable the service.
On YborStudent, the httpd web server failed to start after
a reboot. The systemd status (and the httpd error log) indicates that the “rt3”
Apache config file was to blame; it caused Apache to fail if it couldn’t
connect to its MySQL database. Apparently, mysqld started too
late.
To fix, I copied /lib/systemd/system/httpd.service
to /etc/systemd/service. Then I edited that file to add “mysqld.service” to the end of the “After=” line. When booting,
systemd examines these files to determine the starting order of services.
Like any daemon, if you change configuration files you need to inform
the running daemon. For systemd, after creating/deleting/editing unit files
you need to run the command “systemctl
daemon-reload”.
In addition to service files, systemd has many other types of
“unit” files: for targets (run-levels), for devices to enable/disable, for
“fake” filesystem mounts including swap), and for sockets. To see them all,
try “systemctl --all”. The
socket type unit, like a named pipe, doesn’t run anything until something
connects to the socket.
While not generally managed by SAs directly, the socket
units are a central feature of systemd. All systemd-native services
communicate with the system and each other via these sockets. So, the order
that services start generally won’t matter — nothing happens until both sides
of the socket are connected to. (In the rare case where it matters, an SA can
control the daemon startup order; see the box above for an example.)
If you don’t want to create new service files, you can enable
the processing of /etc/rc.local file, and just put your commands in there. The systemd service
rc-local.service should find and parse this file during bootup. To enable
the service, run:
systemctl enable rc-local.service
To test (run this script) without a reboot, do:
systemctl start
rc-local.service
To see currently running services, just run systemctl [--full]. The argument --full means to show the complete
pathnames of the units. The information shown is “active” if the unit was used
at boot (some units are run on demand, or disabled, and show as “inactive”.
Also show is the current status: “running”, exited”, “error”, etc. (Inactive
units show as “dead”.) You can limit the type of units shown using -t type,
and/or grep the results for (say) “running”.
For example: $ systemctl -t service
| grep
running
Or for on-demand services: $
systemctl -t socket
\
|grep -E 'running|listening'
To see which on-demand services are enabled:
$ ls /etc/systemd/system/sockets.target.wants/
The Linux D-BUS system also uses the same type of unit
files, but those services can’t be managed by systemctl. In
fact, they can’t be managed at all. On my system for example, a number of
daemons are started by D-BUS and can’t be prevented from starting. (D-BUS unit
files are found under /usr/share/dbus-1/.)
(You can also try “service
--status-all”, but that shows
more information than just a list. Or you can use “systemctl list-sockets
[--show-types]”, but that shows
internal sockets as well.)
Similar to Solaris SMF, systemd determines dependencies of all
enabled services, sorts them into Linux cgroups, then starts the
services within each cgroup in parallel as soon as all dependencies are started.
(See /cgroup/systemd/ or /sys/fs/cgroup/systemd/system.) To
see the dependencies of any daemon, use “systemctl
list-dependencies foo.service”.
Using cgroups this way allows systemd to limit resource use by all processes
part of the same service. (Without cgroups, you can either limit resources by
process or by user.)
To analyze the order of service startup (this may not be true for
all versions of systemd), and how long each one took to start, use the command systemd-analyze blame.
SAs manage services with systemctl,
systemadm (GUI for systemctl; install systemd-gtk package, but the GUI is
limited), or by editing the unit files. Note systemd does not use inittab in any way.
You can enable/disable
services from starting automatically at boot time (the GUI tool doesn’t do that
last time I looked), and start/stop them. (Systemd allows some services
to be started per user, using the “--user”
flag with enable/disable.)
systemctl enable|disable|mask|start|stop|reload|restart
\
service
The mask command
makes a symlink from /dev/null
to /etc/systemd/system/service.
Doing this prevents the service from starting (not even manually). This can be
useful when services are incompatible, such as with iptables and firewalld,
or with sendmail and postfix.
Using systemctl,
one can list systemd-controlled services. With no args, this command lists active
services (add --full), or
try -a list-units to view all enabled
services and targets. To restrict the list to just services, add “-t service”.
To find the name of a service file when you only know part
of the name, try the command:
systemctl -a --full list-unit-files
|grep -i foo
To see which service created some process, use this alias for ps:
alias
psc='ps xawf -eo pid,user,cgroup,args'
or use the “systemd-cgls”
tool.
To see running services in the current run-level:
systemctl -t service |grep
running
To see details on a given running service:
systemctl status whatever.service
(A shell script can show this information for all running
services.)
To see the command run for any service:
systemctl -p ExecStart show whatever.service
(Omit the “-p ExecStart”
to see all the details of some service.)
To see the services that failed to start:
systemctl --state failed
Thus, this command replaces both chkconfig
and service for the services it
manages. (You can still use those commands however.) See the man page for the
many other options and sub-commands for systemctl.
To control which services start when the system boots, add
a symlink for the service file in the target’s wants directory. (Target is usually multi-user.target.) This can be done with systemctl enable:
# ln
-s /lib/systemd/system/foo.service \
/etc/systemd/system/multi-\
user.target.wants/foo.service
# systemctl daemon-reload
Systemd uses targets instead of run-levels. By
default, there are two main targets: multi-user.target
(the same as old Red Hat’s run-level 3: all but the GUI) and graphical.target (old run-level
5). There are targets that correspond to each of the old run-levels:
runlevel0.target
-> poweroff.target
runlevel1.target -> rescue.target
runlevel2.target -> multi-user.target
runlevel3.target -> multi-user.target
runlevel4.target -> multi-user.target
runlevel5.target -> graphical.target
runlevel6.target -> reboot.target
There is also an
emergency.target. The rescue
target causes systemd to end all user logins and background services; only
system services run (such as the one monitoring logical volumes, lvm2-monitor,
udev, dbus, and a few others). Sometimes, even these services need to be stopped.
Switch to the emergency.target
to stop all processes except for a shell prompt on the console.
Both modes run the sulogin program. This prints the
prompt message you see, and makes you enter root’s password. On
a system with a physically secure console, you could change that to just /bin/bash in /etc/systemd/system.{rescue,emergency}.target files.
On the boot loader command line, you can specify the
old-fashioned run-level number (or “single”
or “S”), or specify the target
directly (e.g., “... systemd.unit="rescue.target"”).
You switch run-levels using:
systemctl
isolate rescue.target
You can still use the runlevel
(or who -r) command to see the current
run-level, but since systemd supports multiple targets simultaneously, that one
number might be misleading. To see all current targets, try the command:
systemctl
list-units --type=target
This will show all running targets including your running target.
However, there are only a few targets that you can potentially be “running in”;
that is, you should only switch to (“isolate”) or boot into one of six targets
that correspond to the seven old run-levels. These targets are:
Run-level Targets Meaning
0 runlevel0.target, poweroff.target (Shut
down and power off the system)
1 runlevel1.target, rescue.target (Set
up a rescue shell)
2 runlevel2.target, multi-user.target (Set
up a non-graphical multi-user system)
3 runlevel3.target, multi-user.target (Set
up a non-graphical multi-user system)
4 runlevel4.target, multi-user.target (Set
up a non-graphical multi-user system)
5 runlevel5.target, graphical.target (Set
up a graphical multi-user system)
6 runlevel6.target, reboot.target (Shut
down and reboot the system)
None emergency.target (Only run
a root shell)
To see which one you you are “in”, you can use the runlevel
command or this:
systemctl list-units
--type target | grep -E "eme|res|gra|mul"
To see the default target, use:
systemctl get-default
To set a default target to enable at boot time, link one
of these to default.target:
# cd /etc/systemd/system/
# ln -s /lib/systemd/system/<target_name>.target \
default.target
There are special targets you can change. For example,
Ctrl-Alt-Delete is handled by /etc/systemd/system/ctrl-alt-del.target,
by default linked to the reboot target. You can easily create custom targets
and service files if you wish.
Systemd has an automount function that can create “pseudo
mount points” for filesystems configured in
/etc/fstab; they are not really mounted until they are first accessed. Adding
comment=systemd.automount in /etc/fstab will change that mount into
a systemd automount point. This is useful for access to network shares, since
the network connection is not created until the user first tries to access the
mount point.
Most services in Fedora have been migrated to systemd. But
some “legacy” services may still be present. These are managed by chkconfig and service. One problem is that
when a systemd service file exists with the same name as the legacy service
(which is common), these commands simply forward the command to systemctl. Use the “--no-redirect” option to chkconfig (make an alias or script) to disable this “feature” and to
manage the Sys V symlinks as before. You can also install the “legacy” Sys V
init system if you wish.
Summary: Use systemctl to list, enable, disable,
start, stop, and restart services. Standard unit files are found in /usr/lib/systemd/system
(new) or /lib/systemd/system (old). Override unit files by copying into
/etc/systemd/system/ and modifying those. Learn how to use systemctl and
journalctl. For more info, see online resources
for systemd.
Service
Management Framework [Skip this
section]
SMF is the Solaris (since
version 10) replacement for Sys V init
and is similar to Upstart. SMF uses a single method to manage all services
(whether stand-alone or on-demand).
Each Solaris service has a
unique name, a URI string called an FMRI (Fault Managed Resource
Identifier) to identify system objects for which advanced fault and
resource management capabilities are provided. Services managed by SMF are
assigned FMRI strings prefixed with the scheme name “svc” and can be hierarchical ([category/]name), such as application/httpd or network/sshd
(and can be used with some commands as URIs such as scv:/network/sshd or scv://localhost/network/sshd).
SMF has replaced run-levels
with milestones, which are stable services (i.e. they have a
standard FMRI) that represent groups of other services. “svcs -d” can be used to see what
services must be running before a milestone is reached. For example, to put
the system into single user mode, use the command:
svcadm milestone [-d] milestone/single-user:default
The “-d” option sets the default milestone;
without it the system just changes states. Milestone names are “single-user”,
“multi-user”, or “multi-user-server”, as well as the special milestones “all”
and “none” (no services at all). The “none”
milestone can be very useful in repairing systems that have failures early in
the boot process.
When a system fails to boot normally, under Sys V init you
would boot to run-level 1. With SMF add this instead to the boot options: -m milestone = none.
To control which services are started in some
milestone, make the milestone depend on those services. Here is a list of
milestones and their equivalent rc
levels:
|
Milestone
|
RC Level
|
Description
|
|
svc:/milestone/devices:default
|
|
Devices
|
|
svc:/milestone/network:default
|
|
Network interfaces online
|
|
svc:/milestone/single-user:default
|
1
|
Single-user mode
|
|
svc:/milestone/sysconfig:default
|
|
Basic system configuration
|
|
svc:/milestone/name-services:default
|
Any
|
one of the NIS, NIS+, DNS, or LDAP services
|
|
svc:/milestone/multi-user:default
|
2
|
Multiuser mode
|
|
svc:/milestone/multi-user-server:default
|
3
|
Multiuser server mode
|
Instead of making all
milestones dependent on common services, the milestones are set up as cascading
checkpoints. When you change the dependency list for milestone/single-user, you don’t need to change the
dependencies for milestone/multi-user-server.
You still can just telinit to any desired run-level. The
svcadm command is automatically
invoked to reset your milestones whenever you change run-levels. As far as
shutting down the host, the shutdown
or [tel]init commands are still the preferred methods of
performing a safe shutdown or reboot.
SMF
can be logically split into several parts:
·
Startups scripts: These are very like the normal scripts
you see in every UNIX implementation, but are not identical to Sys V scripts.
(Solaris comes with conversion tools.) Note that the old /etc/rc.d/* (or /etc/rc?.d/*) stuff will still work,
it is there for legacy applications to use. The standard Solaris init.d scripts actually run the svcadm command to do their jobs.
·
XML manifests: Every service has an XML manifest
file that holds information about the service, including other services this
one depends on or are recommended. This and other information is kept in the
manifests. XML files are text and can be read by a human and edited
with vi, but XML utilities
(editors, xmlgrep, etc.) are
available. Sample manifests for a stand-alone service and an inetd service can be found at: /var/svc/manifest/{system/utmp,network/telnet}
Using XML and not line-oriented text is a departure of
standard Unix best practices since the 1970s.
·
svcs: The svcs
command is used to tell you status information, such as what services are
started, which are stopped, and what services failed to start and why. “svcs -l
service” will tell you
where to find the error log for service. This command is used during
booting to report the status of each service as it is started. Older systems
tend to spit out lots of messages, which makes finding the important error
messages harder. SMF allows a lot of control over the start/stop logging of
services, making boot-up totally silent if no errors occur! To see why a
service failed, instead of a boot log use svcs -x to show all failure messages.
The -p option shows all
the processes associated with a service. -d
shows what other services this service depends on; -D shows what other services depend on this one.
·
svcadm: The svcadm
command is the administrative tool for SMF. Use this to add, delete, stop and
start services, and to change run-levels (actually milestones). (See
also the svccfg and svcprop commands.) Services can be
started temporarily (until it is shutdown) or permanently (will restart after a
reboot). Using this command allows easier delegation of service
administrators, using sudo or
RBAC. Use “svcadm milestone -d milestone/single-user:default”
to set the default milestone to the named FMRI (Fault Managed Resource
Identifier), which can be single-user, multi-user, or multi-user-server,
as well as the special milestones all (all enabled services online) and none
(no services at all).
·
init: The init
systems works a bit differently on Solaris 10. If a service fails to start or
crashes, it will be restarted automatically or disabled (depending on why it
failed) by svc.startd, the
default SMF restarter. If you stop a service that another service
depends on, that service will also be stopped. Likewise, if you start a
service that depends on several others, they will all be started. Also the
dependency system allows init to start multiple services in parallel, which can
be quite a time-saver.
Predictive
Self-Healing [Skip this section.]
This is a marketing term.
In Solaris, it means the combination of SMF features and the new Solaris Fault
Management Architecture (FMA). Services can be built using FMA to provide
logging (replaces syslog, which
can still be used), error handlers that attempt to handle the error
automatically, enhanced service management, and an attempt at automatic
diagnosis of errors.
The SMF features used for
this include the new automatic service restart features (which is complex so as
to avoid infinite restarts) and boot-log-like features.
Lecture
17 — Controlling System Services (under
Sys V init and Solaris SMF)
Manually
Starting and Stopping Daemons Under Sys V init
Use: init.d/servicename start, stop, restart,
reload, status, and others. (Only start
and stop are universal.)
On RH-like systems you can
use: service servicename action. The Debian (and
Ubuntu) equivalent of service is
invoke-rc.d, but newer
versions include service too.
SuSE: insserv [-r].
Most daemons are designed
to re-read their configuration files when sent a HUP signal. Use: kill -HUP, or on Linux use killall [-sig] servicename. (killall on Solaris (killall5
on Fedora) kills every process! Use pkill
and pgrep instead; these work on
RH too.)
You should also know SuSE’s startproc and the
LSB variant start_daemon, designed to start a daemon. These check for all
processes of the specified executable pathname, and only starts a daemon if no
processes are found. Also SuSE’s startpar, which starts all the rc
scripts for some run-level in parallel.
Controlling
Networked Services
Services are controlled by
independent “stand-alone” daemons (such as for httpd and sshd) or by the super-server (or Internet-server)
daemon called inetd or the newer
xinetd. This is a single
daemon that listens for incoming requests for several services such as FTP,
DNS, POP, etc. This in turn starts the appropriate daemon, which is designed
to handle that one conversation only. So each request starts another daemon
process.
Daemons can be written to be run from init or from [x]inetd but rarely both.
The old version of the
super-server was called inetd
and was controlled by a single configuration file, inetd.conf. The newer version is called xinetd, and although there is an xinetd.conf file each service usually
gets its own configuration file in /etc/xinetd.d.
After changing configuration files the inetd
(or xinetd) daemon must be
restarted, or at least forced to re-read the configuration (reload).
xinetd options can be seen in xinetd.conf man page. Some security options include only_from, no_access, per_source
(limits # connections), user, redirect, and wait (set to yes
for UTP or single threaded services, no
for TCP and multi-threaded servers that can handle multiple sessions
simultaneously).
With systemd, on-demand services don’t use xinetd. Instead, a listening socket can be
enabled/disabled. For example, on Fedora 20 you enable the telnet server (if
installed) with:
# systemctl enable
telnet.socket
You can see number of connections (total since the socket
was created, and current) using systemctl status. Systemd uses the term instantiated service instead
of on-demand. It implements such services with a template .service unit file, “name@[id].service”, in addition
to the .socket unit. You can use this feature to create multiple daemons
of the same service, by using different ids for each. (Keywords inside
the unit file expand to the id, so you can use the id
anywhere within the unit file.) On-demand services don’t need multiple service
files with the id, they are started once per connection and an id is created
for that instance.
Suppose you type “systemctl status foo@bar.service”. Systemd will look for a unit file of that exact name
first. When it doesn’t find one, it will look for the template unit file “foo@.service”. Try this with “systemctl status telnet@foo.service”.
You can see the IDs assigned to instances of some service foo
by using “systemctl --full |grep foo”. You can kill specific
instances with “systemctl kill foo@id.service”.
Sys V
init, BSD rc
In BSD systems (esp.
FreeBSD) the scripts for the services list comments (tags) at the top to say
which service(s) the script PROVIDEs
and which are REQUIREd. There
are some defined pseudo (or virtual) services that can appear as
required, such as FILESYSTEMS
and NETWORKING. These ensure
all those services are up first and are used much like SMF milestones. The BSD
rc program calls rcorder(8) to automatically run the
service scripts in the correct order.
RH systems also have special comments (“tags”) used by
commands such as chkconfig, to determine the symlinks to create and the numbers to
use by default.
In BSD and similar systems,
for each daemon script foo there
is a setting in /etc/rc.conf
called foo_enable to determine
if the service foo should start
at boot time or not. To change if some service starts at boot, boot first into
single user mode and edit rc.conf
to disable. This applies to starting with/without XDM as well.
While BSD way is simpler, the Sys V init system is more
flexible by allowing different sets of services to be identified with a
run-level you can specify at the boot loader prompt.
In Solaris 10 SMF
was created to replace /etc/rc?.d/*
and /etc/init.d/* and [x]inetd configuration. SMF generates
and maintains an XML file with information about all services and their
dependencies. You can edit the XML file (it is text) but it is difficult to do
so by hand. The new commands make this much easier and less error-prone. To
temporarily (“-t”) stop the
telnet service:
svcadm -t
disable telnet # old: /etc/init.d/telnet stop
And to permanently turn it
off, the old way was to edit the [x]inetd
configuration file, but the new way is as above but without the “-t” option. Also enable, restart,
and refresh (old: reload).
Test your understanding: Suppose you wanted to have an email message sent every
time a host reboots or halts. Describe the steps needed for each different
type of init system: Sys V, BSD, SMF.
Solaris uses inetd for on-demand services. It is
part of SAF/SAC (Service Access Facility/Control);
use sacadm -l, pmadm,
config files: /etc/saf/*.
Discuss hosts.{lpr,equiv}, lpd.perms. (For LPRng, not CUPS.)
Both inetd and xinetd can be configured to use TCP Wrappers.
TCP
Wrappers: hosts.{alow,deny},
tcpd, which can be compiled into
many programs—including xinetd—as
libwrap.so. (Show ldd output.) Tcpd is passed
information about the connection (source IP, etc) and the service (pathname to
daemon). It then consults two config files to see if the access should be
allowed or denied. If allowed the daemon is started. If the service is
allowed by hosts.allow, the
daemon is started. Otherwise hosts.deny
is consulted; if not denied then the service is allowed by default. Tcpd also
can be configured to log attempts (successful or not). TCP Wrappers can’t
be used for UDP!
TCP Wrappers can be used
with the old identd daemon to
identify users on remote systems; this is not reliable and is rarely used
anymore.
Note all daemons use TCP Wrappers. So some access policies
are set elsewhere (e.g., /etc/ssh/sshd_config). You need
to know all config files that control access or you might find access is
allowed or blocked when you didn’t intend!
Although TCP Wrappers is
very general, the most common functionality has been added to xinetd (and other stand-alone daemons).
Here’s an xinetd file for ntalk: allows talk connections only from localhost, and that doesn’t use
tcpd:
service ntalk
{ disable = no
socket_type = dgram
wait = yes
user = nobody
group = tty
server = /usr/sbin/in.ntalkd
only_from = localhost
}
If TCP Wrappers not
compiled into xinetd (check messages for xinetd startup message) can manually added it as shown
here; otherwise server=in.telnetd:
service telnet
{ flags = REUSE NAMEINARGS
socket_type = stream
wait = no
user = root
server = /usr/sbin/tcpd
server_args =
/usr/sbin/in.telnetd
log_on_failure += USERID
disable = no
}
Then
edit/create the following files:
/etc/hosts.deny: ALL: ALL
/etc/hosts.allow:
in.telnetd: localhost 10.
(This says to allow */in.telnetd daemon from localhost, or if the source IP starts
with “10.”.) This setup is best
for high security: deny by default. Also, see the man page for tcpd and for hosts.deny.
Be careful when using localhost in configuration files. On
a modern system, this will default to the IPv6 address of “::1”, and not the IPv4 address of “127.0.0.1”. This may mean the service
is listening on one address, while you’re allowing a different address. If in
doubt, use a numerical IP address.
In Solaris 10, using SMF, you can easily enable TCP
Wrappers for all inetd services with: inetadm -M tcp_wrappers=TRUE
or for a single service with: inetadm -m service tcp_wrappers=TRUE
You could also use the svccfg command instead (it
doesn’t make any difference):
# svccfg
-s inetd setprop defaults/tcp_wrappers=true
# svcadm refresh inetd
You can enable TCP Wrappers support for rpcbind by running the following:
#
svccfg -s rpc/bind setprop config/enable_tcpwrappers=true
# svcadm refresh
rpc/bind
This change can be verified by running:
# svcprop -p
config/enable_tcpwrappers rpc/bind
TCP Wrappers access
can be tested with the tcpdchk(8)
and tcpdmatch(8) test
programs (if available). You can use tcpdmatch
to predict how tcpd would handle
some request. For example, a telnet request from the local system:
tcpdmatch in.telnetd localhost
tcpdchk is used to check for syntax errors in hosts.{allow,deny} (and inetd.conf?).
For some fun try the
(undocumented) client-identify utility:
ssh user@host
"/usr/sbin/try-from"
Network services can also
be controlled by a firewall such as iptables (discuss). PAM too can play a role (e.g.,
securetty). So if some service
fails to run it might be blocked by any of these reasons:
·
Not installed or not configured properly
·
Permissions, owner, or group not correct for files
·
The used account the daemon runs as is locked out (commonly due
to an improper shell field in /etc/passed)
·
[x]inetd may not be running, or may not
be configured properly to allow the service to run
·
TCP Wrappers may be blocking the service
·
A firewall may be blocking some or all of the packets for this
service
·
PAM may be blocking the service
·
The kernel security services may block the service (SELinux,
GRSecurity, LIDS, Solaris resource management, ...)
The use of libwrap is documented with man page hosts_access(3).
The syntax of the hosts.allow and hosts.deny files are documented in hosts_access(5) (also man
hosts.(allow|deny) will get that same page). If your version of TCP Wrappers
was compiled to allow the extended (but incompatible) syntax, use the hosts_options(5) man page instead for
details.
[Todo: verify what
happens if xinetd only_from allows/denies access
denied/allowed by hosts.{allow,deny}.
A deny should win.]
Lecture 18 — Database Basics: SQL, MySQL
Configuration
These days an SA must know something
about databases. A database is just a collection of data. Usually this
collection is highly structured into records. Even a simple file
containing structured data, such as the /etc/passwd
file, may be considered a database. (The SQL standard calls databases catalogs,
but the two terms are the same in practice.)
Most databases must retain
the data for longer than a single user session. This means the data must be
saved using persistent storage, a major part of nearly all computer
software including system software, applications, and web (and other network)
services. (Persistent storage technology today generally means hard disks.)
Create, read, update, and
delete (CRUD) are the four basic functions of persistent
storage, a major part of nearly all computer software including many web
applications. CRUD refers to all of the major functions that need to be
implemented in a relational database application or RESTful (Representational
State Transfer) web application to consider it complete.
Databases can be classified
in various ways. One way is to consider the main purpose of the application
(i.e., the most common use of the database): [On-Line] Transaction
Processing databases (OLTP) are optimized for the CRUD operations used
to capture data, whereas decision-support databases (or OLAP, on-line
analytical processing) are optimized for query operations used to analyze
the data.
Data for decision-support
systems is often captured by online transaction-processing systems, extracted
and transformed to a form suitable for analysis, and then loaded into a
decision-support system (i.e., a separate DB). This process is called ETL (extract,
transform, load). The resulting database is called a data
warehouse, giving us the term data warehousing.
[From: publib.boulder.ibm.com]
Transaction-processing systems (OLTP) are designed to capture
information and to be updated quickly. They are constantly changing and are
often online 24 hours a day. Examples of transaction-processing systems
include order entry systems, scanner-based point-of-sale registers, automatic
teller machines, and airline reservation applications. These systems provide
operational support to a business and are used to run a business.
Decision-support systems (OLAP, although no one knows what the on-line part
is supposed to mean here) are designed to allow analysts to extract information
quickly and easily. The data being analyzed is often historical: daily,
weekly, and yearly results. Examples of decision-support systems include
applications for analysis of sales revenue, marketing information, insurance
claims, and catalog sales. A decision-support database within a single
business can include data from beginning to end: from receipt of raw material
at the manufacturing site, entering orders, tracking invoices, and monitoring
database inventory to final consumer purchase. These systems are used to
manage a business. They provide the information needed for business analysis
and planning.
SAs must be able to setup
and manage DBs for developers, testers, and maintainers of applications, for IT
administrative uses (such as single sign-on, IP address maps, asset management,
trouble ticketing, wikis, CMS, etc.), for web sites, and for business
management use , e.g. CRM (customer relationship management systems such as SAP and SalesForce.com)
or ERP (enterprise resource planning). Many of these types of DBs require
periodic tasks or other maintenance.
The SA must also setup
filesystems and storage volumes to hold DB data (not always kept in files) and
to set appropriate mount and I/O options. This must be done by working with a
DBA and/or developer, or the DB performance is likely to be very bad.
Below, we discuss the
commonly used relational database. Relational is a
mathematical term that simply means based on tables. Briefly, a database
consists of tables of data, with each row representing data
related to a single entity (that is, each row is a record) and each column
an attribute. This notion is very powerful, and allows data to be searched
quickly, to answer various queries. Most applications use such
relational databases.
Non-Relational
Databases
Not all databases are
relational. For IT purposes an object orientated, hierarchical database
is often used, usually via an LDAP server (discussed in a networking
course). These are often called directories and not databases. An
example of such a DB is the global DNS system.
More recently, so-call “NoSQL”
(non-relational) databases have become popular for web services and other uses.
CouchDB is a document-oriented
database that stores structured JSON blobs with nested key/value pairs. It is
designed primarily to store configuration data (like dconf). CouchDB has a built-in Web server that is used
by applications to communicate with the database. Other popular non-relational
databases include MongoDB and Cassandra. Another NoSQL DB, designed
for social networking sites, is called Stig.
Amazon has also opened the NoSQL DB it has used internally for years, as a
service called DynamoDB.
The most widely used key-value database must be the Berkley
Database (BDB). Acquired by Oracle in 2006, BDB is still actively being
developed. BDB supports multiple data items for a single key, can support
thousands of simultaneous threads of control or concurrent processes, and can manipulate
databases as large as 256 terabytes, on a wide variety of operating systems.
When you manage clusters of servers or containers, all
must share some data, especially configuration data. This is often done using
one of several key-value databases designed for such purposes (e.g., highly
reliable and replicated). Examples include Apache Zookeeper, CoreOS etcd (see also Github),
HashiCorp Consul. (In-memory databases
are popular too, such as redis
and memcached.) Some of these tools
provide additional functionality needed for clusters of VMs or containers, such
as message brokering or service discovery.
Relational
Databases
As mentioned above, in a relational database each row
of a table is considered a record that contains data related to some
object or entity: a person, a product, an event, an order, etc. The rows
contain columns called attributes or fields, each with a name, a type,
and possibly some constraints. A Person
table might look like this:
|
ID Number
|
Name
|
Title
|
Phone
|
|
0001
|
John Public
|
Anyman
|
555-1234
|
|
0002
|
Jane Doe
|
President
|
555-4321
|
Given such a table, you can
ask queries such as “what is the name of person 0002?” and “what is
the phone number of Jane Doe?”.
Schemas
The design for a database
affects its usability and performance in many ways, so it is important to make
the initial investment in time and research to design a database that meets the
needs of its users. A database schema is the design or plan of the database
including:
·
what data is to be stored
·
the type of each piece of data (e.g., text, number, phone number,
date, ...)
·
how the data will be organized (i.e., what tables to have)
·
any constraints or limits on the data (e.g., number ranges,
length of text string)
·
how the various data relates to one another.
The term schema has another meaning: a group of
database objects (that is, tables, views, indexes, stored procedures, triggers,
sequences, etc.). In this sense, a schema is a namespace, used
to assign conveniently permissions to a number of objects (tables), and to
allow reuse of (table) definitions in several different databases. Usually
there is a default schema for a given database.
A user can access objects in any of the schemas in any
database they can connect to, provided they have the proper privileges.
A database management
system (DBMS) handles all the actual file reading, writing, locking,
flushing, and in general handles all the details of the CRUD operations so the
data is efficiently and safely managed. It also handles other common
operations such as managing network parameters, database creation, schema
definition, security, etc., that are needed to work with databases.
Once set up, a DBMS system
can be used by an application to read data, parse it, and store it, so it can
be efficiently searched and retrieved later. An application connects to
the DBMS, indicates which database to use, and supplies a username and
password.
A given DBMS many run several independent instances
on a given server. Each instance may manage one or more databases
(catalogs), which contain the tables from one or more schemas.
Once connected, an application
sends various query and update (CRUD) statements to the DBMS. Note that these
query and update statements (often written using a standard language such as
SQL) only say what you want (declarative programming). Thus SQL
differs from most programming languages in which you must express how to
do something (imperative programming).
The database can be
structured in various ways: plain old files, in tables of rows and columns, or
as named objects organized in a hierarchy. So why use a DBMS?
Enterprise applications all
have similar data storage needs: they often require concurrent access to
distributed data shared amongst multiple components, and to perform operations
on data. These applications must preserve the integrity of data (as
defined by the business rules of the application) under the following circumstances:
·
distributed access to a single resource of data, and
·
access to distributed resources from a single application
component.
Plain files don’t support this
use. In the old days (1950s–1970s) programmers decided what questions were
going to be asked (for decision support DBs) or what data to capture (for OLTP
DBs), designed a schema for the data (what tables and columns
were needed), and implemented the whole thing in COBOL (shudder). But soon it
was realized that these enterprise applications all had similar needs and
differed only in the specific schema. It was a waste of time to re-implement
the same functionality afresh in each application. Putting the common parts in
a DBMS greatly speeds database application development and helps ensures the functionality
is well-implemented and error free.
Note that while a single DBMS can serve multiple databases
simultaneously, in practice the network bandwidth requirements, large disk
space requirements, and different security and backup policies make this
impractical. Having one host running one DBMS which serves a single database
is a common practice.
A Relational Database
Management System (RDBMS) is a system that allows one to define
multiple databases simply by providing the schemas, and can preserve the data
integrity. Today’s RDBMSes do this very well; some can support a huge number
of tables, with a huge number of rows of data (terabytes and more), for
hundreds of simultaneous clients. Most support additional features and
management tools as well.
All RDBMSes today support a
common language used to define schemas and queries: SQL or Structured
Query Language. The language has three parts, the Data Definition
Language (DDL, the SQL where you define and change schemas) and the Data
Manipulation Language (DML, the SQL where you lookup, add, change, or
remove data). The third part is used to manage the server and the databases;
this may be called Data Control Language or DCL. However this is
the most recently standardized part of SQL and the least well supported; most
DBMSs use non-standard commands for this.
SQL supports software’s
need for CRUD. Each letter in the acronym CRUD can be mapped to a
standard SQL statement: INSERT, SELECT, UPDATE, and DELETE.
System administrators need to be most familiar with DDL and
DCL, since it will usually be their job to manage the DBMS and to create and
manage the databases. Software developers need to be most familiar with DDL
and DML. A DBA should be expert with all parts. But everyone should know
something about each part of SQL.
Although SQL is an ISO and
ANSI standard, most RDBMSes only partially support the standard or add
proprietary extensions that are very useful. This makes changing your RDBMS
vendor difficult, as migrating your data, schemas, and queries can be painful.
It doesn't help that the standard changes dramatically every four years or so,
and that some parts of the standard are marked as optional. Here is a brief
list of the SQL standard versions (From Wikipedia):
·
1986 — First adopted by ANSI and commonly called “SQL-86” or
“SQL-87”.
·
1992 — Major revision adding many missing features, and adopted
as ISO 9075, commonly called “SQL2”, “SQL92” or sometimes “ANSI-SQL” (all
versions are standardized by ANSI).
·
1999 — Major revision adding new data types, regular expressions,
some procedural statements, triggers, and more; commonly called “SQL3”,
“SQL99”, or “SQL:1999”.
·
2003 — Added some XML support, sequences, and automatically
generated column values (e.g., the next ID number); commonly called “SQL:2003”.
·
2006 — Added significant XML support.
·
2008 — Minor revision but with some new features added.
·
2011 — Minor revision with some new features added (notably,
support for temporal tables, where each row is time-stamped and you can search
for data within some period of time).
·
2016 — The current version (as of 2018). Added some major new features,
including JSON support, Regular Expression matching of rows, and date/time
formatting and parsing.
In addition to supporting
different sub-sets of SQL (all modern ones support at least SQL-92), different
RDBMSes support different configuration methods and security models, and need
expertise for tuning the system (adjusting RDBMS parameters and re-working
some queries and schemas) to provide good performance.
A modern DBMS reads in the query and generates several
possible execution plans. Each plan is essentially a program; a
series of low-level disk access operations. All of the plans are correct; when
run, each plan results in the same answer to the query. They differ only in
their efficiency. Picking the wrong plan can make a large difference in the
time it takes when answering the query. The various execution plans are
compared using cost-based query optimizers, and the most efficient (lowest
cost) one is chosen and used.
A badly tuned system can take hours/days rather than
seconds/minutes for some operations! It is up to a database administrator (“DBA”)
to tune the DBMS by setting various parameters, so it stores the data
efficiently and generates efficient execution plans.
Comparing
Popular RDBMSes
By far the most capable and
popular commercial RDBMS is Oracle (about 40% market share), with IBM’s DB2
also popular (~33%). MS SQL server has about 11% (as reported by IDC at databases.about.com
’10). However in recent years a number of open source alternatives have
established themselves: MySQL and PostgreSQL (Postgres) are two
common ones (with a reported market share second only to Oracle). There are
free versions of all popular RDBMSes available.
Of the open source DBMSes,
MySQL is (currently, 2010) more popular than PostgreSQL. It is very fast for
certain applications, and works very well with PHP, so has become a de facto
standard for web development (LAMP: Linux, Apache, MySQL, and
PHP). The heart of any DBMS is the DB engine. MySQL supports several, each
tuned for a different purpose. The MyISAM engine is the fast one, but it isn’t
suitable for OLTP. The InnoDB supports features similar to PostgreSQL and
other RDBMSes, but is not very fast. InnoDB was bought by Oracle (while the
rest of MySQL was bought by Sun). FYI: The DB engine for Microsoft Access
DBMS is called the “Jet” engine.)
In 2010, Oracle bought Sun Microsystems and now owns all
their assets, including MySQL. In 2011, Oracle added some proprietary
enhancements to MySQL, moving it toward a non-free, non-open source model; its
future is uncertain. In 2013, a number of systems including Fedora have
announced a switch to MariaDB.
MariaDB is a
community-developed “fork” of MySQL, released under the GPL. Its lead
developer is Monty Widenius, the founder of MySQL, who named both products
after his daughters My (?) and Maria.
Another fork of MySQL worth knowing is Percona, developed
by the former performance engineer of MySQL.
PostgreSQL supports
more of the current SQL standard and has advanced features (e.g., multiple
schemas per DB), and can be very fast for some uses. It’s a fine all-around RDBMS.
It is also becoming popular as developers shy away from the uncertain future of
MySQL. It is highly recommended for new deployments when you don’t have a
legacy MySQL system to worry about.
Small DB libraries to embed
in your application such as SQLite are
popular too. (These support one client with one DB, but that is fairly
common.) For more insight on the differences between popular RDBMSes see at wikipedia.org, “Comparison_of_relational_database_management_systems”.
Apache Derby is
good for small to medium sized databases (up to a few tens of millions of rows
each for dozens of tables), and is bundled with Java. MySQL/MyISAM (now owned
by Oracle) is great for Gigabyte sized databases that require fast connects,
such as for web applications, but doesn’t support transactions. For
OLTP, use PostgreSQL, MySQL/InnoDB, or VoltDB.
Go with a commercial DBMS such as Oracle or DB2 for Terabyte sized DBs.
(Google’s DB is measured in Petabytes, and they use a custom-built DBMS called BigTable.)
Note even a small DB needs to be well designed (including
proper indexes) or it will suffer performance issues.
Defining
Relational Databases
When defining a relational
database, you need to specify the database name, how (and by whom) it can be
accessed, and the schema that defines the various tables in the database.
(Other items may be defined as well, such as procedural functions, triggers,
sequences, views, etc.) The heart of the database is the schema; for each
table, you need to specify the name of the table, the attributes’ names and
their datatypes, and any constraints on the columns or the table as a whole.
Tables can be defined with the SQL CREATE
TABLE statement. After the table is created, the schema can be changed
with the ALTER TABLE statement,
but this can be dangerous and slow if the table already contains lots of data.
Datatypes are
the names given to the types of each attribute (column), but are not well
standardized. Common ones include Boolean, integer, float, fixed-length and
variable-length strings, binary objects, as well as currency, dates, times, and
intervals. Every attribute must be assigned a datatype.
Constraints
are used to limit the type of data that can go into a table. Some of the
commonly available constraints (depends on the DBMS used) are:
·
NOT NULL A null value is a special value that
means “no data”. Use this constraint to prevent creation of a row of data with
a null for some column.
·
UNIQUE Unique means no duplicates allowed in that
column.
·
PRIMARY KEY A primary key is a column
(or set of columns) that are not null and unique. A table can only have one
primary key defined. Usually an index is created automatically for the primary
key.
·
FOREIGN KEY A foreign key constrains
the values in a column to be primary keys from some other (specified) table.
This is useful to prevent updates from causing inconsistent data. This is
sometimes called referential integrity. The techniques known as cascading
update and cascading delete ensure that changes made to the linked
table are reflected in this table.
·
CHECK This constraint is used to limit the value range
that can be placed in a column. A CHECK constraint on a single column it
allows only certain values for this column; on a table, it can limit the values
in certain columns based on values in other columns in the row. The constraint
is some Boolean expression, such as “age
> 0”.
·
DEFAULT Not really a constraint, it specifies a
default value to be inserted for new rows that don’t specify a value for that
column. (Has no effect on pre-existing rows.)
Joins and
Referential Integrity
Foreign key constraints
depend on data from multiple tables. The data in multiple tables are linked
using an operation called a “join”. A join essentially builds a
composite table from two (or more) tables that have a common column. For
example, suppose you have a book table with a book_number, title,
and publisher_code, and a publisher table with publisher_code
and publisher_name. Then you can do a SELECT
(or other action) on the composite of these to show the title and publisher_name.
You can also ensure only valid publisher_code values are added to the book
table.
There are four types of
joins, but it is probably enough for a system administrator to just know the
names of them: an inner join (the column has the same value in both
tables), a left (outer) join (all the rows from the left table even if
no matching value in the right table), a right (outer) join, and a full
(outer) join (all rows from both tables become rows in the composite
table). With outer joins, missing values show as nulls. Also note that nulls
don’t match anything, not even other nulls, and should be prevented by the
schema when possible.
Normalization
Normal forms
are a way to prevent DML operations from destroying real data or creating false
data. That can happen if the schema isn’t designed for the types of queries
and multi-user activity that is common. An un-normalized schema is considered
to be in normal form 0 (zero).
Modifying schemas into normal
forms is a straight-forward process of transforming a schema from normal form n
to normal form n+1. Although there are many normal forms (at least 9,
or over 300, depending on how you count them), normal forms 4 and higher cover
obscure potential problems that very rarely ever manifest, or can be dealt with
in other ways. Practically, most DB schema designers are happy with third
normal form.
[The following example was
adapted from Joe Celko’s SQL for Smarties, 2nd Ed. (C)2000 by Morgan
Kaufmann Pub., chapter 2.]
Consider a schema for
student course schedules. The original design might be something like this:
Classes (name, secnum, room & time,
max seats available, professor's name,
list of students (1..max seats available) )
where each student has (name, major,
grade).
First Normal Form
requires no repeating groups; each column value must be a single value and not
a list as stated above. The Classes
schema violates this by having an attribute “list of students”. This schema
can be converted (normalized) to 1st NF as a single SQL table, where
each row can be uniquely identified by the combination of (course, secnum,
studentname); that becomes the composite
primary key. The SQL for the revised schema would be something like this:
CREATE
TABLE Classes
(course CHAR(7) NOT NULL,
secnum INTEGER NOT NULL,
time INTEGER NOT NULL,
room CHAR(7) NOT NULL,
maxSeatsAvail INTEGER NOT NULL,
profname CHAR(25) NOT NULL,
studentname CHAR(25) NOT NULL,
major CHAR(15) NOT NULL,
grade CHAR(1),
PRIMARY KEY (course, secnum, studentname)
);
This schema is in first
normal form, but still leads to various anomalies:
·
If Prof. Pollock wins lotto and quits, you could delete all his
classes by deleting all rows with profname="Pollock".
But this also deletes the information about what students are taking Unix/Linux
classes (deletion anomaly).
·
If a student changes a computer course to, say an English poetry
course, the database will suddenly show Prof. Pollock as teaching poetry (update
anomaly).
·
If HCC hires a new instructor, there is no way to store that
until that instructor has been assigned at least one class with at least one
student in it (insertion anomaly).
With this schema, it would
be up to the application code to also update the other attributes in the row
where a student changed their course. This is difficult and error-prone to fix
in all the application code that uses some DB, requiring complex application
update logic and query checking. Even with all that, not all these problems go
away.
Such ad-hoc solutions are
impossible to maintain over the long run as your database grows. Many of these
problems fade away if each table represents a single fact only. That means the
queries may work on several tables at once, but a RDBMS is designed for exactly
that.
Second Normal Form
breaks up tables from a schema in 1st NF that represent more than one fact into
multiple tables, each representing a single fact. This can be understood with
the idea of a table key. Each table should have a column or group of
columns that uniquely identifies a given row. In the schema above the key is (course, secnum,
studentname). In 2nd NF, no
subset of a table key should be useable to uniquely identify any non-key
columns in a table. If they can then the table represents multiple facts.
Our table violates 2nd NF
since (student, course) alone determine the (secnum) (and thus all other columns).
Checking for other column dependencies shows (studentname)
determines (major).
To transform this 1st NF
schema into a 2nd NF one, we need to make sure that every column of each table
depends on the entire key for that table. Apparently our database represents
three “facts”: data about courses, data about sections, and data about
students. One possible way to convert the schema into 2nd NF is to split the
one table into three tables like this (note the additional constraints used,
just to show how to use them):
CREATE TABLE Classes
(course CHAR(7) NOT NULL,
secnum INTEGER NOT NULL,
time INTEGER NOT NULL,
room CHAR(7) NOT NULL,
maxSeatsAvail INTEGER NOT NULL,
profname CHAR(25) NOT NULL,
PRIMARY KEY (course, secnum),
FOREIGN KEY(secnum) REFERENCES Sections(secnum)
);
CREATE TABLE Students
(studentname CHAR(25) NOT NULL,
major CHAR(15) NOT NULL,
PRIMARY KEY (studentname)
);
CREATE TABLE Sections
(secnum INTEGER NOT NULL,
studentname CHAR(25) NOT NULL,
grade CHAR(1),
PRIMARY KEY (secnum, studentname),
FOREIGN KEY(studentname) REFERENCES
Students(studentname),
CHECK (grade IN ("A", "B", "C", "D",
"F", "I"))
);
However, this schema is
also not in second normal form! The Sections table represents information
about both sections and about student grades. After splitting that table into
two, the final 2nd NF schema becomes:
CREATE TABLE Classes
(course CHAR(7) NOT NULL,
secnum INTEGER NOT NULL,
profname CHAR(25) NOT NULL,
PRIMARY KEY (course, secnum),
FOREIGN KEY(secnum) REFERENCES Sections(secnum)
);
CREATE TABLE Students
(studentname CHAR(25) NOT NULL,
major CHAR(15) NOT NULL,
PRIMARY KEY (studentname)
);
CREATE TABLE Sections
(secnum INTEGER NOT NULL,
time INTEGER NOT NULL,
room CHAR(7) NOT NULL,
maxSeatsAvail INTEGER NOT NULL,
PRIMARY KEY (secnum),
);
CREATE TABLE StudentGrades
(secnum INTEGER NOT NULL,
studentname CHAR(25) NOT NULL,
grade CHAR(1),
PRIMARY KEY (secnum, studentname),
FOREIGN KEY(studentname) REFERENCES
Students(studentname),
FOREIGN KEY(secnum) REFERENCES Sections(secnum),
CHECK (grade IN ("A", "B", "C", "D",
"F", "I"))
);
This four table schema can
answer the same queries as the original single table one, but those queries and
updates will be more complex. For example, to answer the question what
courses is a given student taking? or what is the grade for a given
student in a given course?, you will need to use queries with joins.
If you’re wondering why the primary key for table Classes is not just secnum, it’s because at my school
the section numbers can be reused. The real key is probably (secnum, year, term), but I didn’t wish to clutter up the example with all the
attributes that would be required in the “real-world”.
[ Skip rest of normalization except if high
interest, and time is available. ]
Although many anomalies are
now addressed, notice that maxSeatsAvail
not only depends on the key for Sections,
but also on the room column.
This is sometimes called a transitive dependency: room depends on section and maxSeatsAvail depends on room.
Such a dependency is only acceptable in certain cases, and those require
careful application logic so the data doesn’t get corrupted. This leads to...
Third Normal Form
transforms a schema in 2nd NF by splitting up tables even more than was needed
for 2nd NF. To split up the table to remove the transitive dependency, note
that 2nd (and 3rd) NF might have multiple possible keys for a table. One is
the primary key and the others are called candidate keys.
This notion of candidate keys can be used to define 3rd NF:
In 3rd NF, suppose X and Y are
two columns of a table. If X implies (determines) Y, then either X must be the
(whole) primary key, or Y must be (part of) a candidate key.
maxSeatsAvail has this problem: room is not the primary key nor part of any candidate
key, but maxSeatsAvail depends
(only) on room. To transform
this schema into 3rd NF we split the Sections
table into Sections and Rooms tables:
CREATE
TABLE Classes
(course CHAR(7) NOT NULL,
secnum INTEGER NOT NULL,
profname CHAR(25) NOT NULL,
PRIMARY KEY (course, secnum),
FOREIGN KEY(secnum) REFERENCES Sections(secnum)
);
CREATE
TABLE Students
(studentname CHAR(25) NOT NULL,
major CHAR(15) NOT NULL,
PRIMARY KEY (studentname)
);
CREATE
TABLE Sections
(secnum INTEGER NOT NULL,
time INTEGER NOT NULL,
room CHAR(7) NOT NULL,
PRIMARY KEY (secnum)
);
CREATE
TABLE Rooms
(room CHAR(7) NOT NULL,
maxSeatsAvail INTEGER NOT NULL,
PRIMARY KEY (room)
);
CREATE
TABLE StudentGrades
(secnum INTEGER NOT NULL,
studentname CHAR(25) NOT NULL,
grade CHAR(1),
PRIMARY KEY (secnum, studentname),
FOREIGN KEY(studentname) REFERENCES
Students(studentname),
FOREIGN KEY(secnum) REFERENCES Sections(secnum),
CHECK (grade IN ("A", "B", "C", "D",
"F", "I"))
);
Any good database book (see
reviews at www.ocelot.ca/design.htm)
will show you how to address other problems with additional normal forms. For
example, this schema still allows multiple sections to be assigned the same
room at the same time, or one professor teaching multiple courses at the same
time. A good schema would make (most) such anomalies impossible. The
alternative is to design queries, inserts, updates, and deletions very
carefully, with extra care taken to locking tables (to prevent data corruption
from simultaneous queries and updates). Obviously it is better if the schema
design prevents such corruption from ever occurring.
It isn’t a system administrator’s job to create schemas for
most of the organization’s databases. But SAs are expected to be able to
create simple schemas for IT uses, and to understand normal forms in general in
order to work with DBAs and developers.
Transactions
It is often required that a
group of operations on (distributed) resources be treated as one unit of work.
In a unit of work, all the participating operations should either succeed or
fail (and recover) together. In case of a failure, all the resources should
bring back the state of the data to the previous state (i.e., the state prior to
the commencement of the unit of work). (Ex: transfer money between accounts.)
The concept of a transaction,
and a transaction manager (or a transaction processing service) simplifies
construction of such enterprise level distributed applications while maintaining
integrity of data. A transaction is a unit of work that has the following
properties:
·
Atomicity: A transaction should be done or undone
completely and unambiguously. In the event of a failure of any operation,
effects of all operations that make up the transaction should be undone, and
data should be rolled back to its previous state. (‘A’ should probably stand
for “abortable”.)
·
Consistency: A transaction should preserve all the
invariant properties (such as integrity constraints) defined on the data. On
completion of a successful transaction, the data should be in a consistent
state. In other words, a transaction should transform the system from one
consistent state to another consistent state. For example, in the case of
relational databases, a consistent transaction should preserve all the
integrity constraints defined on the data. (Those who coined this acronym
reportedly said the ‘C’ “was tossed in to make the acronym work”; consistency
is a term with many meanings and was not considered important at the time.)
·
Isolation: Each transaction should appear to execute
independently of other transactions that may be executing concurrently in the
same environment. The effect of executing a set of transactions serially
should be the same as that of running them concurrently. This requires two
things:
o
During the course of a transaction, intermediate (possibly
inconsistent) state of the data should not be exposed to all other
transactions.
o
Two concurrent transactions should not be able to operate on the
same data. Database management systems usually implement this feature using
locking.
This is an unsolved issue in databases (as of 2017). True
or strong isolation is known as “serializable”, but most implementations
of that have major performance issues. So most DB vendors provide weaker
isolation by default that doesn’t provide the same guarantees, such as read
commited or snapshot isolation levels. (And vendors don’t generally
mean the same thing when they use these terms!) Thus data loss and corruption
do occur in the real world.
·
Durability: The effects of a completed transaction should
always be persistent. This too is trickier than it seems at first. If the
disk reports the write was successful, was the data saved to non-volatile
storage or just a RAM cache? If it was saved to disk, is that sufficient? If
that replica dies (say due to a disk crash), the data is lost. Yet waiting for
all replicas across an internet to report the data was saved takes too long. A
compromise is to say it is durably saved if saved successfully to two
replicas. Note, SSDs if unpowered will start to lose data in a few weeks,
another aspect of durability to consider.
These properties, known as ACID
properties, guarantee that a transaction is never incomplete, the data
is never inconsistent, concurrent transactions are independent, and the effects
of a transaction are persistent. (Most of the time anyway.) Never use a
non-ACID DBMS for anything important!
The transactions are
written to a transaction log file, sometimes called a journal or
a write-ahead log (WAL). Once that write succeeds, the transaction is
applied to the DB tables, with the changes also saved to a separate file. This
way a failed transaction (from a crash or an abort) can be easily “rolled back”
by undoing/discarding changes made from the aborted transaction.
DB transactions are similar to filesystem journaling. A
DBMS records the commands for all changes in a given transaction to a log file
(the journal). Then it makes the changes to the tables. Finally, the DBMS
marks that log entry as complete. If the system crashes at any point, it can
simply replay the journal entries to restore the DB, completing the transaction
in progress. This works because such log entries are idempotent. That means
running such commands more than once won’t corrupt anything. (Most DBMSes also
use a form of COW, meaning the DB tables look unchanged to other users until
the transaction is complete.)
SQL Basics:
Most SQL statements are
called queries or updates, and can be entered on one line or
several lines. They end with a semicolon (“;”),
although not all DBMSes will require this. The SQL keywords are not case
sensitive; only data inside of quotes is case sensitive. (Some SQL DDL
statements were shown above when defining a schema for normal forms.) SQL uses
single quotes around literal text values (some systems also accept double
quotes). Some examples of SQL:
INSERT
INTO table (col1,
col2, ...)
VALUES (val1, val2, ...);
SELECT [DISTINCT] col1, col2, ...
or use wildcard:
* instead of a column list
FROM table [, table2, ...]
WHERE condition (e.g. WHERE amount < 100)
ORDER BY col;
UPDATE table
SET col2 = value2, col3 = value3, ...
WHERE condition; (e.g. WHERE col1 = value1)
DELETE
FROM table
WHERE condition; (e.g., WHERE col1=value1)
A great way to practice and learn SQL is to use the SQuirreL SQL GUI client. This
is a portable Java application (so you need to install Java first!), that is
easy to use with any database. See SquirrelSQL.org
to download or for more information.
Some of the more common Data
Manipulation Language (DML) SQL statements (the ones used for CRUD)
include: SELECT (to find and show
data), INSERT, DELETE, and UPDATE. For example, here’s a useful query done on the
MySQL databased used for the class UnixWiki site:
SELECT user_name, user_real_name, user_email
FROM unix_wiki.user;
Other SQL commands aren’t
as well standardized. They are used for defining schemas (Data Definition
Language, or DDL) and for DBMS control operations (Data Control Language, or
DCL). Some of the more common ones include: CREATE,
ALTER, DROP, GRANT
and REVOKE.
Other SQL commands aren’t
as well standardized. The Data Definition Language (DDL) is used
for defining schemas (CREATE, ALTER, and DROP tables and views). The Data
Control Language (DCL) supports DBMS control operations. Some of the
more common DCL statements include GRANT and REVOKE.
There is no standard SQL to list the databases (the
SQL standard uses the term schema) available on some server.
There is a standard SQL query to list the schemas in a
database (the SQL standard uses the term catalog). (Note Some
DBMSes don’t support schemas, or don’t follow the standard, e.g., DB2 and
Oracle). For compliant RDBMSes use:
SELECT
SCHEMA_NAME FROM INFORMATION_SCHEMA.SCHEMATA
Not all RDBMSes support the standard SQL to list the
tables in a DB/schema:
SELECT TABLE_NAME FROM
INFORMATION_SCHEMA.TABLES
WHERE TABLE_SCHEMA = 'name'
(Oracle uses “SELECT * FROM TAB”;
DB2 uses “SYSCAT” instead of “INFORMATION_SCHEMA”.)
Using INFORMATION_SCHEMA it is possible
to describe (list the columns and their types and constraints) any table, but
not all RDBMSes support this. For Oracle use “DESCRIBE tablename” and for DB2 use “DESCRIBE TABLE tablename”.
A system administrator also
needs to know a little about: indexes, views (virtual
tables), sequences (generates the next number each time it is
used), tablespaces (allows grouping of tables on the disk), triggers
(do a task automatically when some condition occurs), functions,
and stored procedures. While not all RDBMS systems support all
these features, you do need to understand what they are. Here is an example
using a sequence:
CREATE SEQUENCE seq;
INSERT INTO foo(id, name)
VALUES(NEXTVAL('seq'), 'Hymie');
See one of the on-line SQL
tutorials for more information; one of the best is sqlzoo.net,
and the SQL tutorial at w3schools.com
is pretty good too. I like the book The
Manga Guide to Databases as an introduction, but I use on-line sources to
learn SQL, especially when learning the non-standard SQL for some particular
DBMS.
Prepared statements
(and similarly for stored procedures) are SQL statements that are pre-compiled
into an execution plan, and stored with the DB. These should always be
preferred to regular (dynamic) SQL statements when possible, as
they are more efficient and much more secure (mitigating against SQL injection
threats).
Here’s an example for MySQL
prepared statements:
PREPARE stmt1 FROM 'SELECT id
FROM Users
WHERE name = ? AND password = ?';
SET @a = 'Piffl'; SET @b = 'secret';
EXECUTE stmt1 USING @a, @b;
And an example of creating and using a MySQL
stored procedure:
DELIMITER $$
CREATE PROCEDURE getQtyOrders
( customerID INT, OUT qtyOrders INT )
BEGIN
SELECT COUNT(*) INTO qtyOrders FROM Orders
WHERE accnum=customerID;
END;
$$
DELIMITER ;
CALL getQtyOrders(1, @qty);
SELECT @qty;
Here’s an example of a PostgreSQL
prepared statement:
PREPARE usrRptPlan (int) AS
SELECT * FROM users u, logs l
WHERE u.usrid=$1 AND u.usrid=l.usrid
AND l.date = $2;
EXECUTE usrRptPlan(1,
current_date);
And an example of creating and using a PostgreSQL stored
procedure:
CREATE FUNCTION
getQtyOrders(customerID int)
RETURNS int AS $$
DECLARE
qty int;
BEGIN
SELECT COUNT(*) INTO qty FROM Orders
WHERE accnum = customerID;
RETURN qty;
END;
$$ LANGUAGE plpgsql;
SELECT getQtyOrders(12677) AS
qty;
MySQL (and
MariaDB)
The documentation for MySQL includes tutorial
introductions and reference information, but a system administrator can get by
with much less information, shown here. (Learning to install and configure a
DBMS is covered elsewhere.)
To use MySQL or MariaDB may
require some initial setup, depending on the version. For older systems, MySQL
comes pre-configured with a root user without any password, and a test database
any user can access. More recent versions come locked-down. After starting
the server for the first time, you should run the command:
# mysql_secure_installation
This is a wizard that will
ask some questions and un-lock the system for you. On the older versions, you
need to set a password for root@localhost,
and add a user or two. For each user, it is useful to create a separate
database where they can experiment without affecting others. In addition, you
might want to drop the test*
databases. Accepting all the defaults from this screipt is fine.
You can avoid those command
line arguments if you set the values in a file ~/.my.cnf.
This file can contain your plaintext password, but don’t add that on a
production server! In any case, set the permissions to 400.
Running MySQL from cmd
line:
mysql -u user [-h host]
-p
Changing
passwords from the command line:
mysqladmin -u user
password secret
The root user can also
change passwords from inside the mysql
DB:
mysql> SELECT * FROM
mysql.user WHERE user = "user"\G
mysql> SET PASSWORD FOR "user@localhost"=password('new-password');
mysql> SET PASSWORD FOR "user@%"=password('new-password');
(Ending
a MySQL query with “\G” instead
of a semicolon results in a vertical output format, useful when there are many
columns.)
Add
users: (If using mysqladmin,
run “mysqladmin reload”
afterward.)
GRANT ALL PRIVILEGES ON *.* TO "user@localhost"
IDENTIFIED BY 'secret' WITH GRANT OPTION;
GRANT ALL PRIVILEGES ON *.* TO "user@%"
IDENTIFIED BY 'secret' WITH GRANT OPTION;
Delete users:
mysql> DELETE FROM mysql.user WHERE user = 'user';
MySQL configuration and
security model: define some users. Define a DB (“CREATE DATABASE name;”), add some
tables, add some data, and do some queries. [Project idea: Design and implement
a MySQL DB for an on-line greeting e-card site. (Show HCCDumpSrc.htm.)]
To recover a lost password, log in as root and change it as
shown above. To recover a lost root password, stop the server. Create a text
file ~root/reset-mysql-pw with this single command:
UPDATE
mysql.user
SET Password=PASSWORD('MyNewPass')
WHERE User='root'; FLUSH PRIVILEGES;
Then restart the server with:
mysqld_safe --init-file=~root/reset-mysql-pw &
When this has worked, delete the file (it contains a password),
and restart the server normally.
It is possible, but dangrouous, to start the server with “--skip-grant-tables --skip-networking”, then login as user root and no password is needed.
You can then reset anything, then restart as normal.
(Debian stores the clear-text password for its system
MariaDB user in /etc/mysql/debian.cnf.)
You can dump MySQL/MariaDB
databases as plain text files, containing the SQL statements needed to recreate
the DBs. This has many uses, including systematic changes via some script,
then re-creating the DB from the modified text. You can also use tools such as
grep on this file, which can be
useful when you don’t know which table has some data you’re looking for. The
dump is a portable backup, which can be used with other DBMSes. To create an
SQL text dump, run:
mysqldump --extended-insert=false
--all-databases > dbdump.txt
(You can
specify just one or a few DBs with the option “--databases
mydb”.)
PostgreSQL
(a.k.a. Postgres)
PostgreSQL (which is pronounced post-gres-q-l) is
often just called “Postgres”, the original name before it switched to use SQL.
Originally, it just used Unix system user accounts, so no extra effort was
needed to add users. For modern versions (currently version 9) you must
instead add a role for each user who is allowed to connect to the
server.
The rules for authenticating users
are controlled by a configuration file, /var/lib/pgsql/data/pg_hba.conf.
The default for local (non-network) user access via the psql command line tool is to just
trust them. So you should not need to use a password! (This can be changed to
increase security.) Other choices include pam,
ldap, md5, ident
sameuser (often used for local
access, this means allow a user to connect without a password using their
system login name as the role name), and others.
In PostgreSQL, a user is really just a role
with login ability. Creating users with CREATE USER is the same as CREATE ROLE WITH LOGIN (i.e., a role with login privilege).
The PostgreSQL security system is a bit
simpler to understand than the MySQL system. With PostgreSQL, the owner
of some object (e.g., a database or a table) can do anything to it, as
can any PostgreSQL administrator user (a.k.a. super-user). All
other users must be granted/denied access to objects using the SQL GRANT and REVOKE commands.
When adding user roles to PostgreSQL,
use either the CREATE USER
non-standard SQL command or the command-line tool createuser. With this tool you can also put in
a password for the user. There is also a dropuser utility that matches the similar
(non-standard) SQL command. (Use “-e”
to see the generated SQL.) Roles are stored in pg_catalog.pg_roles.
This table can be viewed, or modified to change proprieties or passwords of
users:
\x
SELECT * FROM pg_catalog.pg_roles WHERE rolname='auser';
ALTER ROLE auser WITH PASSWORD 'secret';
\x
“\x” toggles vertical or horizontal output of rows.
For displaying a single row with many columns, I prefer the vertical (or expanded)
output format. Besides the password you can alter the other role properties
too.
To work with PostgreSQL, you must
configure pg_hba.conf (or live
with the defaults), initialize the database system (done as part of the
install; you only need do this step once), and then start it running:
#
export PGDATA=/var/lib/pgsql/data
# cd /tmp
# su -c 'initdb' postgres
On Sys V init based systems, such as Fedora
15 or older, you can use:
#
/etc/init.d/postgres initdb
For Fedora 16 and newer Red Hat
systems, systemd has replaced Sys V init scripts and you can’t do this anymore.
Instead, run this new command:
# sudo
postgresql-setup --initdb
The only admin (actually the only user)
initially is “postgres”. You
need to start the server and create the user root
within PostgreSQL. To start the server:
# /etc/init.d/postgres start # SysV init system
To start the server using systemd, run
this command instead:
#
systemctl start postgresql.service
Next, make a new Postgres user “root”,
as an administrator:
#
cd /tmp; su -c 'createuser -s root' postgres
The above command makes root an administrator too (the “-s” option). (Note that user postgres may not have access to your
home directory. To avoid an error, you should cd
into a public directory such as /tmp
before running this.)
To allow the use of the PostgreSQL
procedural language extensions to SQL, you must add this “language” to a
database first. You can do this to the default template (“template1”) which is copied when creating
new databases:
# su -c 'createlang plpgsql template1' postgres
(This is done automatically on newer
systems; if so, you will see a harmless error message.)
Finally we are ready to create a
database for some user. First, you must add the username as a new role
in postgres. Then you can create a database owned by that user, using SQL
or the shell utility createdb.
Note that createdb defaults to
creating a DB named for the current user (and owned by that user). Since root has database creation privileges,
note how simple the first example below is:
#
createdb # Create a DB named root, owned by root
# createuser auser
# createdb -O auser auser
(You can add a comment for your DBs
with additional arguments.) To connect to the database as some user (other
than your current UID), run this:
#
psql -d auser -U auser
(Note if you log in as auser, then you can omit all the
command line arguments, as that will attempt to connect to the auser database by default.)
You can also do these steps
from within PostgreSQL. For example, to create a new user, run psql as a
privileged user and enter this SQL:
username=#
CREATE USER name WITH PASSWORD password;
And to drop a user, enter
this SQL:
username=#
DROP ROLE user;
The last step is to enable
your database server to start automatically at boot time. Again your init
system dermines how this is done. With systemd, do this:
#
systemctl enable postgresql.service
RDBMS
Performance Tuning — A Dark Art
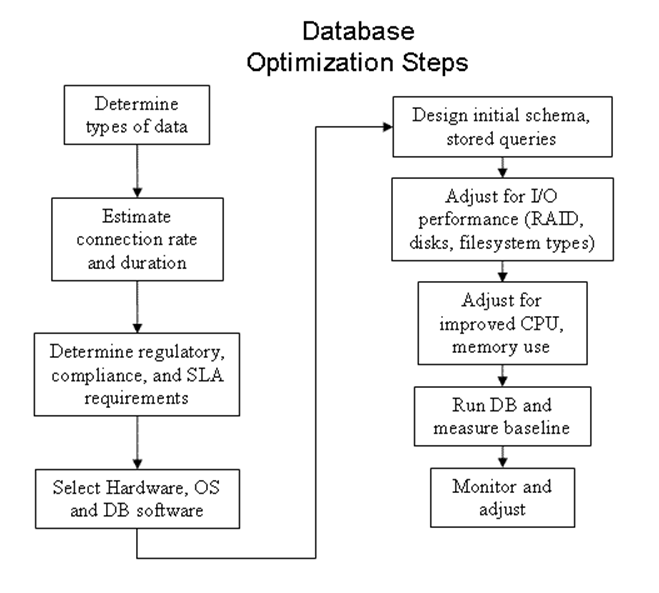
The first task is to
make sure the database is running on appropriate hardware. Modern SCSI
(such as SAS) may be best but SATA will work well too. Make sure it is modern
or it may not support write barriers correctly. Use enterprise grade
disks. Aside from spinning 2 or 3 times as fast as consumer grade ones, the firmware
is better and more predictable (replacing a consumer grade disk, even with the
same model, may not result in the same disk firmware.) Enterprise disks can
also have non-volatile write caches (backed up with a battery or large
capacitor).
Next, decide on central
storage (SAN or NAS), or DAS. DAS may perform better (no network latency and
no HBA, network switch, or OS write caches between your OS and the drives) but
are not as flexible and may cost the same or more than central storage.
Turn off any OS LVM or
software RAID. As for RAID, most database servers will work best with RAID
10. This give similar reliability to RAID-5 or RAID-6, but without parity
calculations to slow down writes.
Finally, you will do best
if you use the lower numbered cylinders (outer edge) of any spinning disks for
the logs and database tables, and use the slower inner cylinders for OS and
other system files. SSDs will work even better.
You need to monitor CPU
usage (mpstat), RAM usage (free or vmstat),
and disk I/O (iostat). (Linux
tools; Unix may have different tools.) By monitoring these, you can see if a
lack of hardware resources is the problem (and view trends over time, to
predict when hardware upgrades might be useful).
Two key points for the SA
are to use a safe filesystem type (e.g., ext4 or XFS, but not JFS or
ReiserFS), and to force disks to write data immediately (known as direct
write) by turning off any hardware disk buffering/caching (via hdparm -W 0),
unless using a non-volatile buffer. Turn off any kernel buffering too!
(Otherwise the DBMS thinks the data has been written when it may not have been;
so crash recovery may lose/corrupt data.)
With ext4 filesystems, you can control the journaling
feature: no journaling (write-through cache) with the mount option data=writeback, ordered writes (only filesystem metadata is journaled,
but the by writing data then the metadata makes this fairly safe) with the
mount option data=ordered, and journal (everything is journaled; safest but slowest)
with the mount option data=journal. Best advice is to use journal mode and change to ordered
mode only if performance is bad and changing this seems to make a difference.
Different types of
filesystems work better with DBs than others. Using any FAT filesystem for a
serious DB will cause poor performance. Using something like JFS or ext2 can
improve performance at the cost of safety (not all writes are journaled).
Using a journaling filesystem or RAID-1 (or similar) works best for DBs that
don’t do that internally anyway (but most do, with a transaction log file).
Note that without filesystem journaling, the transaction log file can become
corrupted in a crash. Using tablespaces, you can put that log on one
filesystem and the data on another.
Depending on how critical
the data is, you may not want to use direct write as it slows down access to
other files on that disk volume. With a decent UPS the small safety gain may
not justify the performance loss. On the other hand an important DB shouldn’t
share a storage volume with other files; it should have one or more storage
volumes of its own. Also consider that with SAN/NAS/external RAID/JBOD storage
systems, you may not have control over this, and in any case there are many
caches between the server’s memory and the disk platter (the HBA, network
switches, NAS head).
Creating a separate
partition and filesystem just for the DB files works better than creating those
files in (for example) the root file system with lots of non-DB files. Using
separate filesystems for indexes, table data, and transaction logs can also
greatly improve performance, especially if the different filesystems are on
different disk spindles.
Either use a faster
filesystem type and RAID-0 and let the DBMS handle those issues, or tune the
DBMS to not bother with journaling (except for the logs) and/or mirroring.
Once the hardware is
selected and your data is safe, then consider performance tuning. Poor
performance will result when using a DB on a default filesystem type with
default settings. A poorly tuned system can be much slower (10 times) than a
properly tuned one! The different can be between minutes and days to execute
some query. For example using Oracle on a FAT32 or ext4 filesystems with
RAID-1 when Oracle uses different block and stripe sizes, journals writes to
its files, and possibly mirrors the tablespaces, is not going to be fast!
First off, make sure you
use a modern kernel version. Many have improved disk software a lot in recent
years (2015). After choosing the file system type, set FS parameters.
Block (cluster) size can
have a big impact on DBMS performance, particularly when running a database
much bigger than system memory. One way to solve this problem is to reduce the
value of the file system cluster size (maxcontig
parameter) so that the disk I/O transfer size matches the DB block size. Another
solution is to enable file system Direct I/O by mounting the file system with
the right option (--forcedirectio
for UFS), since file system Direct I/O will automatically disable the read-ahead.
In addition, since MySQL has its own data and cache buffers, using Direct I/O
can disable the file system buffer to save the CPU cycles from being spent on
double buffering.
For most RDBMs the default
OS value for disk read-ahead setting is too small, usually 256 (= 128
KiB on older drives). A good value should be 4096 to 16384. To set on Linux,
use either hdparm or blockdev --setra (usually from rc.local). Next, mount the filesystem(s) with noatime. These two measures are
probably the most important ones to improve performance.
The final OS tunable
parameters to worry about are for OS caching and swapping. On Linux, set vm.swappiness to 0 (default: 60) to
make the system avoid swapping as much as possible. (The trade-off is a
smaller disk cache, but that’s worthwhile for most DBs.) To also help prevent
swapping, set vm.overcommit_memory
to 2 (never overcommit memory). Lastly you can control how many dirty memory
pages the OS will allow to be outstanding before flushing them to disk; too many
and the delay when the flush does occur will be noticeable, especially if you
have lots of RAM. You can set vm.dirty_ratio
to 2 and vm.dirty_background_ratio
to 1 if you have more than 8 GiB of RAM. (All of these settings can be changed
using sysctl, or directly using
the /proc system. Make sure you
set these at boot time, either by editing sysctl.conf
or rc.local.)
One of the most important
steps to tuning a DB is to create a good set of indexes. (This is
likely more important than messing with tunable parameters.) Without proper
indexes for you tables, many queries rely on sequential (linear) searching.
Having too many indexes can also hurt performance, as the system must maintain
all indexes whenever a table is updated. The primary key column(s) should be
indexed (default for MySQL). Other columns may or may not benefit from
indexing. By using the EXPLAIN
command to show you details of the most common queries, you can determine which
other indexes might help.
Bad performance can be the
result of poor DB management: most DBMS use DB statistics (row counts, etc.) as
input to the query optimizer. If these stats aren’t automatically updated by
the DBMS and you don’t update them regularly, the optimizer can do a
spectacularly poor job. For example, if the stats say a table with 100,000
rows has only 10 rows, then most optimizers would scan it sequentially because
a sequential scan on a table that fits in one disk block will always be quicker
than indexed access. You should turn on auto-stats (or whatever that feature
is called on your DBMS) if that’s an option, or manually update them from time
to time otherwise.
Performance also depends on
the amount of writes versus reads for your application. Filesystems are
typically designed have reads as fast as possible, and the difference in read
and write speeds can be very noticeable.
If using NAS or SAN,
network congestion is another factor.
Many enterprise-class DBMS
(e.g., Oracle) don’t require a filesystem at all and can manage the raw disk
space themselves. This feature is often referred to as “tablespaces”, each of
which can be thought of as a file holding the DB data and meta-data. (With
PostgreSQL, tablespaces sit atop regular filesystems.)
Setting the DB cache sizes
is important as well, or the files used for the DB will end up swapped to disk
and the frequent dirty page writes will slow down the whole system.
Keep in mind monitoring
and backups: If using a filesystem the DB gets backed up (and disk space
gets monitored) by your normal filesystem tools and procedures. If using raw
disk volumes then you must use your DBMS system to monitor and backup the data
using a separate procedure. Have an appropriate backup policy (SLA) and
restore procedures. Often a monitor process must be kept running too, for
security, compliance auditing, and baselining purposes.
The bottom line is
for small or web site DBs that are mostly read-only, a filesystem based DB
should be fine. For large OLTP systems, you need to have the DBA and the
system administrator work together to tune the disk layout, the filesystem
types used, and the DBMS itself. If using some enterprise DBMS such as Oracle
that handles much of what the filesystem and RAID system can do itself, using a
raw disk volume (and properly tuned DB) will result in the greatest performance
for OLTP systems.
MySQL (and
MariaDB) Specific Tuning
MySQL is a single-process,
multithreaded application. The main thread is idle most of the time and “wakes
up” every 300 milliseconds (msec) to check whether an action is required, such
as flushing dirty blocks in the buffer pool. For each client request, an
additional thread is created to process that client request and send back the
result to each client once the result is ready.
MySQL includes several
storage engines including MyISAM, ISAM, InnoDB, HEAP, MERGE, and Berkeley DB
(BDB), but only InnoDB storage supports ACID transactions with commit,
rollback, and crash recovery capabilities, and row-level locks with queries
running as non-locking consistent reads by default.
InnoDB also has the feature
known as referential integrity with foreign key constraints
support, and it supports fast record lookups for queries using a primary key.
Because of these and other powerful functions and features, InnoDB is often
used in large, heavy-load production TP systems.
MyISAM (and ISAM) is
for simpler applications (e.g., PHP blog, catalog data, and other non-OLTP
applications). This has fewer features and limited scalability, but can
provide superior performance (esp. connection speed) when you don’t need those
features. You can use different engines for different tables in the same
database, to get the maximum performance and safety.
MySQL has peak performance
when the number of connections equals roughly 4 times the # of CPU cores. By
estimating the number of concurrent connections, you can plan how large a SMP
or cluster to use (i.e., how many DB servers are needed).
MySQL doesn’t access the
disk directly; instead, it reads data into the internal buffer cache,
reads/writes blocks, and flushes the changes back to the disk. If the server
requests data available in the cache, the data can be processed right away.
Otherwise, the operating system will request that the data be loaded from the
disk.
Use EXPLAIN query
to see what MySQL does. Use this insight to see where to change queries and/or
add indexes. Tuning your queries and adding the required indexes is the best
way to affect performance.
Once you’ve chosen the
proper filesystem types, created the appropriate number of filesystems for your
database, set their options and mount options correctly, and set the OS tunable
parameters appropriately, it is time to consider adjusting the database's
internal tunable parameters. Normally, that is left for a DBA to handle,
not the system administrator (MySQL has over 430 tunable parameters!). But
there are some performance measures you can consider for MySQL (and MariaDB):
·
For applications where the number of user connections is not
tunable (i.e., most of the time), the innodb_thread_concurrency
parameter can be configured to set the maximum number of threads concurrently
kept inside an InnoDB. (Other threads are kept waiting their turn.) If the
value is too small under heavy load, threads will be kept waiting and thus
performance will suffer. You need to increase this value when you see many
queries waiting in the queue in show innodb status output. Setting this value at 1000 will disable
the concurrency checking, so there will be as many threads concurrently running
inside InnoDB as needed to handle the different tasks inside the server, but
too many requests at once can also hurt performance.
·
table_open_cache
is the maximum number of simultaneous open files MySQL will request. Since
each table is a separate file, you should set this to at least the number of
tables used in your most complex query, times the number of DB connections you
allow from clients. The default value (for MySQL 5.5) is 400 (used to be 64)
and a real-word DB may have hundreds of tables, dozens at a time used in
queries, with dozens to hundreds of open connections from clients. Note your
OS must allow that many open files per process.
·
The query_cache_size
is the amount of memory to use to store the results of previous queries. This
parameter can be set to 128MB or less, to provide better performance if usually
many clients do read operations on the same queries. For some reason, this is
set to zero on MySQL 5.6!
·
The modern MySQL and MariaDB use the InnoDB back-end by default.
The parameter innodb_buffer_pool_size
determines how much memory the DBMS will request from the OS. On a DB server,
you will get better performance from your system if you assign memory to this
buffer pool, rather than a general OS page (disk) cache. The default value of
8 Mbytes is too small for most workloads. You will need to increase this
number when you see that %b (percentage utilization of the disk) is above 60%, svc_t (response time) is above 35 msec
in the iostat –xnt 5 trace
output, and a high amount of reads appear in the FILE IO part of the show InnoDB
status output. However, you
should not set the cache size too large. If you do, you run the risk of
expensive paging for the other processes running without enough RAM, and it
will significantly degrade performance. For systems running a single dedicated
MySQL process only, it should be fine to set this parameter up to a value
between 70 and 80 percent of memory since the footprint of the MySQL process is
only around 2 to 3 Mbytes.
·
Another parameter to tune is key_buffer_size,
which defaults to 1MB on older versions, and controls the size of the common
cache used by all threads. With >256MB of RAM, set to 64M at least.
Scaling
and Reliability
DBs are often a vital part
of an enterprise, and must be highly available. This often means using some
duplicate hardware in order to improve reliability (includes servers and
disks). Duplicating the data on multiple servers is called replication.
Also clusters are sometimes used to provide transparent failover
and load balancing. In really large DBs (“big data”), tables are often
split into shards. Such a distributed DB requires the query to
figure out which shard holds the data requested, or to query each shard in turn
and merge the results. (Example: DNS data is distributed and replicated.)
Most of these DB topics are beyond the scope of Sys Admin,
certainly beyond the scope of this course. You are encouraged however to know
these terms and concepts in a general sense.
Other
Types of DataBases
Besides Relational
databases, other types are used. One type is called a time-series
database, used for storing event and metric data. Such databases are commonly used
for monitoring systems (discussed in the vAdmin II course).
Blockchain is
a new (2008) type of database, used for many purposes. A blockchain serves as
the basis for some cryptocurrencies such as Bitcoin (the first public
blockchain) and Ether. At its heart, a blockchain is a list of blocks of
records. Every so often, a group of records is collected into a block which is
added at the end of the list. Strong cryptographic methods are used making any
changes to the blockchain very difficult. This means the blockchain can be
used as a ledger that cannot be rewritten and can be verified by anyone with
access. A typical blockchain block holds transation records (each digitally
signed), plus a hash of the previous block, a time-stamp, and possibly other
data. As of 2017, many companies are experimenting with blockchain technology
to see if it can work better than traditional databases for particular
applications.
Lecture 19 — Printing
Concepts
An application creates a printjob,
which is put into a spool directory (a.k.a. queue directory
or print queue or just queue). A printer
daemon (a.k.a. spooler) is a program the periodically
examines the spool directory for any printjobs, tracks the status of printers,
and sends printjobs to printers. (Spool is an acronym for System
Peripheral Operation Off-Line, but I don’t believe this myself.)
In olden times this
might’ve been as simple as cat printjob >/dev/lp0. KSR-33 TeleTYpe had uppercase letters
only. Line Printers had 132 chains of letters and could print a line at a
time. Later page at a time printers were developed. Laser printers came
later, originally only publishers could afford these phototypesetter
machines (CAT, Linotype). This meant that primitive word processors were very
limited in their effects: bold (by printing twice), over-strike, and
underline. Boring! Other old printer technologies include ASCII printers,
daisy-wheel, and dot-matrix. (Such dumb printers can be quite useful to attach
to a parallel port and send log info, which is just plain text, to the
printer.) Controlling the printer’s available features meant using special printer
codes embedded in the document to be printed (originally human
typesetter instructions, such as “.sp”). (See the Typewriter Symphony
Youtube video.)
Modern printers evolved from
the dot-matrix printers, and include laser printers and ink-jet
printers. The output quality of these printers is controlled by the dpi
(Dots Per Inch, hxv, e.g., 600x600dpi). Such printers allow
fancy looking output in various fonts, and not just text. Now word processors
and other programs could use fancy printing, but the word processor document
format is no longer just text and includes font and other embedded information
(e.g., graphics). This document must be translated from some
proprietary word processor format (e.g., MS Word) to the language the printer
understands, the page description language or PDL.
Over time, two PDLs
dominated the printer market: Adobe’s PostScript (Unix std PDL) and
Hewlett-Packard’s Page Control Language or PCL (which evolved from
printer escape codes). This translation is controlled by two bits of software.
The printer driver knows the specifics of a given printer: paper
size, dpi, features supported, and the communication details; that is, how the
computer talks to the printer. The actual software that communications with
printers is known as the backend. The other is the print filter,
which knows how to translate one or more document formats into some PDL.
(Analogy: Windows Add a printer means to install a print driver; MS
Office ships with print drivers = print filters.) Note it is common
(unfortunately) to use these terms interchangeably.
There are efforts to reduce the number of print filters
needed, by standardizing the document format between applications and vendors.
Some examples include PDF, MS OOXML, and ODF (Open Document Format used by
OpenOffice and LibreOffice). PDF is the default PDL in CUPS 1.6 and
newer; older print systems often used PostScript as the PDL.
As of 2014, all important desktop applications (GTK/GNOME,
Qt/KDE, LibreOffice, OpenOffice.org, Firefox, Thunderbird, ...) send print jobs
in PDF and not in PostScript any more, by default (at least on Linux systems).
Print filters can also
perform accounting or even redirect print jobs across a network to a remote
printer.
Most Unix systems include a
suite of filters to translate various formats to PostScript, which has become
the system standard format in Unix. So what if your printer is a PCL, GDI, or
other type of printer?
Many generic (or
dumb) printers without PostScript use ghostscript
to translate Postscript to their PDL (or to strip the graphics and add printer
codes in the text, for really old printers). GhostScript can translate
PostScript to any of a few hundred different dumb printer formats.
The inventors of GhostScript, Artifex Software Inc.,
have now merged the commercial version with the free version (which had bug
fixes and new features delayed by one year), and will provide better support
for PDF documents, a format many printers can support natively.
Some non-PostScript
printers include GDI (a.k.a. winprinter; GDI is the system standard
graphic format for both screen and print) printers or PPA (from HP) printers.
Such printers have no CPU, RAM, or rendering engine, so they’re cheaper. The
work is done via software on the host: appl --> (PS-->)
GDI --> (video driver or printer driver) --> bit-map. HP
printers usually support both PCL and PostScript, and traditionally work well
(especially for Unix).
Local and
Remote Printing
Local printers
(a.k.a. attached) attach to a port on the host. Usually parallel
ports are used for printers. These ports are named /dev/lpn where n=0,1,2,... On Linux (/dev/lprn or /dev/parportn are sometimes
used instead). (Serial ports can also be used. These are /dev/ttySn on Linux.) Modern
Printers can attach to USB ports, /dev/usb/lpn
on Linux.
Remote printers
are printers locally attached to some remote host that runs a print server.
Besides the normal printing issues you must have the client and server
communicate using some protocol: LPD (RFC-1179), IPP (Internet Printing
Protocol), CIFS (SMB), and even HTTP are common. If using a modern
printing API, applications can directly send print jobs to queues on remote
hosts.
If your applications use an
older print API the local host must run some minimal print server (queue
software). The administrator defines local queues that (behind the scenes) forward
print jobs to remote print servers. Local applications thus only need to use
what they think is a local printer. However this means a more complex setup on
every host, and if a printer is upgraded or moved to a different host (or a
print server changes its IP address), every host will need updating!
Network printers
may have their own spooling software (commonly using the JetDirect print
server, a tiny special purpose host that only runs a print service) or they may
be dumb and rely on some host to provide spooling. In this case the
administrator must make sure there is only one host controlling the printer and
no host sends print jobs directly to that printer.
Use Samba to
connect to a remote Windows print server for printing via CIFS/SMB. (The name
for one popular, old version of SMB is CIFS. Even though SMB2 and SMB3 are
very different than SMB1/CIFS, the name “CIFS” somehow stuck. Try to avoid
using it.) You can setup a Samba server to allow remote Windows clients to use
your local printers (must configure /etc/smb.conf
to allow Windows clients to see your printer in their network neighborhood).
Note that Windows servers can be configured to use the LPD protocol.
(Samba can also be
configured to provide print services to Windows clients.)
Usually there is one print
queue for every printer, local or remote. However it is possible to
define multiple printers for the same queue (HCC did this in the open lab when
we used slow printers), and multiple queues for the same printer (usually each
queue has a separate priority or requires paper changing). A printer
destination is the name of a queue (which is normally the same as the
printer name). Note printer destination names may be restricted to 14
alphanumeric, case-insensitive characters.
Common
Print Systems
LP Print System -
derived from the original AT&T system, LP doesn’t support remote printers.
All modern systems have grafted on some other system to support this. (Used on
Solaris pre-11, HPUX.) nsswitch.conf
can be used to tell the local system where printers
configuration information is (files, LDAP, NIS, etc.).
LPR Print System LPR
derived from the BSD print system, and is still widely supported on Unix,
Linux, and even Windows NT. See RFC-1179 (a.k.a. the LPD protocol). Access
control is provided by two means. First, all requests must come from one
of the machines listed in the file /etc/hosts.equiv
or /etc/hosts.lpd. Second, if
the rs capability is specified
in the /etc/printcap entry for the printer
being accessed, lpr requests
will only be honored for those users with accounts on the machine with the
printer.
LPRng Print System LPRng
is a re-worked LPR from the ground up, with new configuration and access
control files: /etc/lpd.conf
(LPRng configuration file), /etc/lpd.perms
(LPRng printer permissions), /var/spool/-printer*
or .../lpd/* (spool
directories and printer-specific printcap info).
CUPS Print system
Common Unix Printing System (yes I know it’s redundant). (See www.cups.org.) Used on Linux, Solaris 11, and
many other OSes. CUPS uses the Internet Printing Protocol (“IPP”)
as the basis for managing print jobs and queues. The Line Printer Daemon
(“LPD”), Server Message Block (“SMB”, renamed “CIFS” (Common Internet
File System) and then renamed in later versions back to “SMB”; the name “CIFS”
somehow lingers on), and AppSocket (a.k.a. JetDirect) protocols
are also supported with reduced functionality. CUPS adds network printer
browsing and PostScript Printer Description (“PPD”) based printing options to
support real-world printing under UNIX. (Note CUPS includes print filters for
text, PS, PDF, and other std formats.) Some decent (but perhaps outdated)
articles can be found at openprinting.org
- V.CUPS-Filtering-Architecture and LinuxFoundation.org
- openprinting group home.
When printing to a Windows printer, you often need to
specify NetBIOS share names. A common error is to forget backslashes have
special meaning to the shell. Use forward slashes instead, or doubled back
slashes.
Print
Filter Collections
APSfilter is a
filter collection for LPR or LPRng systems, which can auto-detect input file formats
and translate PostScript, ASCII, TeX DVI, PCL, GIF, TIFF, HTML, PDF, and a
number of bitmapped graphic formats to PostScript. It then uses GhostScript to
support non PS printers. APSfilter utilities setup the LPR printcap file and
create the print queue directories, including configuration data and correct
permissions. Magicfilter is similar.
Foomatic is a print
filter system designed to support any spooling system (including CUPS). It is
a part of OpenPrinting’s print filter database environment Foomatic and
is a standard part of all modern Linux distros.
You can find filters that ship with CUPS in /usr/lib/cups/filter/.
The main filter/RIP (Raster
Image Processor) wrapper foomatic-rip works like APSfilter to
detect input format and convert to PostScript. It then uses a collection of PPDs
and printer drivers to make the final translation for the actual printer driver
(note GhostScript may be used as the printer driver). See www.linuxfoundation.org/.../foomatic.
PPDs are text
files that describe all printer options and features. Originally, PPDs were
designed by Adobe just for PostScript printers (the name means PostScript
Printer Description). CUPS extended their use to all printers. Find
PPDs at openprinting.org/printer_list.cgi.
Most (if not all) print filter collections include an extensive collection of
PPDs as well. The definition of the PPD file syntax can be found at partners.adobe.com.
Most Linux printer drivers
use foomatic-rip which is a standard part of all modern Linux
distros. Foomatic-rip is also used with Solaris.
You can find PPD files (and some CUPS filters) in /usr/share/ppd/. Foomatic PPDs are in /usr/share/foomatic/db/source/PPD/.
User CLI
Utilities and Configuration
Users can have ~/.printcap (LPD) or ~/.printers (Solaris) files to support
their own printers. CUPS users can have ~/.lpoptions
to override per-system (or per server) settings.
The lpr and lp commands take cmd line args to determine what
printer destination to use, what print filter to user, etc. (Solaris: see ppdmgr(1M).) These CLI utilities came
from the BSD and AT&T print systems respectively, but today all print
systems provide both commands (perhaps one with limited functionality. Many
simple GUI applications simply invoke one or the other to print. (Most modern
applications use some printing API).
There are defaults for
everything: The system check for PRINTER
and LPDEST environment
variables if no cmd line args are present, and .printcap/.printers if present or a system-wide
default printer, which is a printer named lp
or the first printed defined in printcap/printer.conf if no lp printer. lpoptions can be used to override system defaults (CUPS).
With CUPS, use lpstat to see printer and queue
information: lpstat -dap. To set a default queue
(destination, or printer), use: lpoptions
-d name. To see your current printer settings (in ~/.lpoptions), use: lpoptions -l. (Note that when run as root, lpoptions changes
the system-wide defaults in /etc/cups/lpoptions,
not the root user’s settings.)
Use pr to print text files with page
headers.
Use col -bx to strip (some) control characters, e.g., printing
man pages.
Some print filters can be
invoked directly with the results piped into lpr.
Use a2ps, enscript,
or mpage for 2-up
printing and other effects such as controlling margins for plain text. (ex: mpage -m38lt.) You can edit the print filter wrapper (shell)
scripts used with some print systems. Edit /var/spool/lpd/lp/mf.cfg
to invoke mpage with various
arguments with LPRng.
enscript is a popular print filter. It can convert a text file to
PostScript, Rich Text Format (RTF), and HTML. You have many, many options to
control what is printed and how. For example, you can convert a text file to a
two column PostScript file using landscape mode, with the command: enscript -2 -r -p psfile.ps file.txt. Or print Bash shell scripts with syntax highlighting as
HTML, with: enscript -Ebash -p - -w html script.sh.
Printing Related Commands
|
Description
|
AT&T (lp)
|
BSD (lpr)
LPRng
|
Solaris pre-11
|
CUPS
|
|
Print facility
config
|
lpadmin
|
lpc
|
lpset,
lpadmin, lpsystem
|
lpadmin,
GUI, lpoptions
|
|
Submit a print
job
|
lp
|
lpr
|
lpr/lp
|
lpr/lp
|
|
Printer daemon
|
lpsched,
lpshut
|
lpd
|
lpsched,
lpshut
|
cupsd
|
|
Enable a printer
|
enable†
|
lpc
|
lpset/lpc,
enable
|
cupsenable
|
|
Disable a printer
|
disable
|
lpc
|
lpset/lpc,
disable
|
cupsdisable
|
|
Enable a print
queue
|
accept
|
lpc
|
lpset/lpc,
accept
|
cupsaccept
|
|
Disable a print
queue
|
reject
|
lpc
|
lpset/lpc,
reject
|
cupsreject
|
|
Cancel a pending
print job
|
cancel
|
lprm
|
cancel
|
cancel/lprm
|
|
view printing
status
|
lpstat
|
lpq
|
lpstat
|
lpstat,
lpinfo, lpq, lpoptions
|
|
Printer database
(in /etc)
|
printcap
|
printcap
|
printers.conf
|
cups/*
|
|
Access controls
(in /etc)
|
|
lpd.perms,
lpd.config (hosts.lpd)
|
lp/printers/name/*
|
cups/cupsd.conf
(use lpadmin)
|
|
Spool directories
(in /var/spool)
|
lpd/*
|
print/*
or lpd/*
|
lp/*
|
cups/*
|
† Note: Bash uses enable as an internal command.
You should use the complete pathname to the enable
command every time, to avoid conflicts.
Configuration
Use LPRng command checkpc (check print configuration)
command.
GUI tools for printer
setup: RH printconf, Sun Solaris Print
Manager
Red Hat’s GUI printer
config tool rewrites /etc/printcap
each time, so changes made manually are lost. Put your changes in /etc/printcap.local instead.
To configure CUPS, edit
files under /etc/cups/, run lpadmin or other CLI tools, or use the
GUI by opening the URL of http://localhost:631/
in a web browser.
CUPS restricts who can admin the CUPS system and even who
can use it to print. The default on Fedora is to allow any user in one of
these groups (setting in cups-files.conf):
SystemGroup sys root wheel
So when using the GUI, either supply the root user and password, or your own username and password if
you are a member of group wheel.
To switch print systems,
reset symlinks in /etc/alternatives
via the RH and Debian alternatives
command.
A common problem with text
printing is Stair-stepping. This can be fixed by enabling LF
-->CR/LF in the print filter configuration used for text files.
CUPS on Fedora have known issues with the default
configuration! Why this has never been fixed, I have no idea. But if you find
you cannot use CUPS, try setting SE Linux to Permissive at boot time (edit
the file /etc/selinux/config), and rebooting. (The alternative to disabling SE Linux
is to trouble-shoot the issues and fix the policy yourself. Start by running “restorecon -Rv /”, then reboot and fix the policy errors one at a time
until there are none left. You may find you also need to enable a boolean for
CUPS (“setsebool -P
cups_execmem 1”).)
By default, CUPS on Fedora sends error messages to the journald daemon and not /var/log/cups/error-log; you then
read CUPS related log messages with “journalctl -b -u cups”. It is
possible to configure CUPS to send logs to files instead. If you do that, also
enable log rotation for those files.
Windows username to use
at HCC-DM: PRTUSER, pw=PRTUSER
CUPS info: Use “smb://user:password@domain/server/share”
as a URI to connect to a Windows printer, e.g.:
smb://PRTUSER:PRTUSER@DM_ACADEMIC/DM_TECH_B/Tech_461
xojpanel: a GUI app that displays an HP printer’s LCD
panel on your desktop.
Linux uses /etc/papersize to tell utilities
the preferred size: letter, legal, a4,
etc. (This can be over-ridden with some env. vars: PAPERSIZE, LC_PAPER,
or PAPERCONF (points to a
different file to use). See papersize(5) for more, also paperconf(1)
and paperconfig(8).
Discuss firewall, SELinux
issues (turn off initially to print).
Solaris pre-11CLI
Printer Setup
[From:
www.sun.com/bigadmin/content/submitted/duplex_printing.html]
You can use lpadmin to set up a print queue. The
exact options differ from Solaris printing and CUPS; see also lpoptions, lpinfo, lpstat,
cupsenable, and accept. Here is a Solaris example
for the Brother HL-5170DN, which is attached to the network with the
host name laser:
# lpadmin -p myprinter -v
\
/dev/null -m netstandard_foomatic -o protocol=bsd,dest=laser \
-T PS -I postscript -n /usr/local/ppds/br_5170_2.ppd
In the above, -T PS
and -I postscript indicate that this is a PostScript-capable
printer; you need this to prevent the printing subsystem from trying to send
ASCII banner pages to it. The -n
option indicates the location of the PPD file. You should use the real
location of your file, which might be a file in /usr/lib64/lp/model/ppd,
or it may be somewhere else on the system. The -m,
-v, and -o options basically configure access to the printer
itself. If your printer is locally attached you might use this instead:
# lpadmin -p myprinter -T PS -I postcript
-v /dev/ecpp0 \
-m standard_foomatic -n /usr/local/ppds/br_5170_2.ppd
You
also need to configure lpsched
to enable both the queue and printer. Use these commands:
# accept myprinter
# enable myprinter # if using bash, use a pathname!
You can now print duplex
pages using one of the following command syntax:
% lp -d myprinter -o
sides=two-sided-long-edge somefile.ps
% lp -d myprinter -o sides=two-sided-short-edge somefile.ps
% lp -d myprinter -o sides=one-sided somefile.ps
Setting
Default Queue Options
To avoid specifying options
every time, you set default options for a queue with:
% lpadmin -p myprinter -o sides=two-sided-long-edge \
-o banner=never
If your printer is networked,
you can set up different queues with different default options. With CUPS, see
the other lp* commands for available options.
Print
Quotas and Accounting
CUPS supports page and
size-based quotas for each printer. The quotas are tracked individually for
each user, but a single set of limits applies to all users for a particular
printer. For example, you can limit every user to 5 pages per day on an
expensive printer, but you cannot limit every user except wpollock.
With CUPS, every printed
page is logged in /var/log/cups/page_log,
so one can read this file and determine who printed how many pages. These
functions depend on CUPS filters reading the PostScript produced to determine
page counts. Page logging is only available for drivers that provide page
accounting information, typically all PostScript and CUPS raster devices. Raw
queues and queues using third-party solutions such as Foomatic generally do not
have useful page accounting information available. In addition, clients that
render the print job internally without using CUPS filters can’t be accounted
for.
If there is a problem when printing
(e.g., a paper jam) after the CUPS filter has processed the job, the
accounting will show the job as printed even though it wasn’t.
To restrict the number of
pages (or Kbytes) which a user is allowed to print in a certain time frame, use
the lpadmin command for the
print queues:
lpadmin
-p printer1 -o job-quota-period=604800 \
-o job-k-limit=1024
lpadmin
-p printer2 -o job-quota-period=604800 \
-o job-page-limit=100
The first command means
that within the “job-quota-period” (time always given in seconds, in this
example we have one week) users can only print a maximum of 1024 Kbytes (= 1
MByte) of data on the printer “printer1”. The second command restricts
printing on “printer2” to 100 pages per week. One can also give both
restrictions to one queue. Then both limits apply.
While there is no way to
query the current quota state for a particular user, any application can
request a list of jobs for a user and printer that can be used to easily
determine that information.
For more sophisticated
accounting use (third party) add-on software which is specialized for that
job. Such software can limit printing per-user, can create bills for the
users, use hardware page counting methods of laser printers, and even estimate
the actual amount of toner or ink needed for a page sent to the printer by counting
the pixels.
A well-known and free
software package for print accounting and quotas is PyKota: www.pykota.com
A simple system based on
reading out the hardware counter of network printers via SNMP is accsnmp:
fritz.potsdam.edu/projects/cupsapps/
Current
Problems with Printing
Printing is too complicated
today! Every *nix variant requires its own printer drivers/filters, due to
minor differences between distros. Also most cheap printers don’t directly
support the standard (intermediate) print file format of PostScript.
One problem with having so
many print systems available is that applications must be written to use a
specific one or suffer limited functionality (if they use lp or lpr when CUPS
API is available) or not print at all (if they use CUPS API when that isn’t the
print system installed). It is hoped that CUPS will become universal but that
hasn’t happened yet. (Many organizations have used lpshed, Solaris printing,
LPD, etc., for years, and see no great incentive to change everything around).
With CUPS, printer features
aren’t discovered but listed in a PPD. Printer feature discovery would be much
better (as even a printed that can staple may be out of staples now). Another
nice feature missing currently is to save frequently requested options as a job
ticket, so you can easily set up a print job. Also there is no standard
way to easily print from PDAs, cell phones, BlackBerries, etc., using (say)
Bluetooth or USB.
The Future
of Unix/Linux Printing
[From www.onlamp.com/pub/a/onlamp/2007/09/20/printing-trends-in-linux.html]
The Open Printing Working
Group (OLPW), the Linux printing group formally under the control of the Free
Standards Group is now (like the LSB) under the Linux Foundation (linux-foundation.org) umbrella. The
OLPW works closely with the Open Print Working Group (OPWG) of
the IEEE Industry Standard and Technology Organization (ISTO) so their
work should apply to Unix and Linux systems. This new open printing standard
is called the Open Standard Print API (or PAPI).
Instead of applications
having to support many different print systems, the application-neutral, print
system-neutral middleware PAPI can be used. This API is the same
regardless of which print system is used.
It is easy to configure
PAPI for different print systems and the applications won’t know the
difference. PAPI has interfaces for LPRng, CUPS, etc. Currently an open
source version of PAPI is available from sourceforge.net.
The OPWG is backed by most
printer vendors who want to provide printing support for Linux (and Unix) and
realize they can’t afford to put in the same effort dealing with each
distribution that they put into dealing with Microsoft. About half of the
OPWG’s volunteers work for printer vendors or ISVs. See OpenPrinting.org for more
information.
These groups are also
working on standards to support automatic printer driver installation (similar
to the Windows printer installation system). However security is a concern for
this; no doubt the drivers will be required to have digital signatures and
other protections before automatic driver download and installation becomes
useful.
Printer feature discovery
is increasingly available by using printers that support SNMP. This support
can be incorporated into CUPS, allowing easy and accurate printer dialogs, and
better printer management.
The new LSB version
(3.2) will cover printing standards, so OS neutral print
drivers/filters will soon be used. LSB has standardized on CUPS and Foomatic.
One of the decisions
already made and slowing being accepted is to switch the standard Unix print
job format from PostScript to PDF. This format has many important
advantages: PDF is the common platform-independent web format for printable
documents, Portable, Easy post-processing (N-up, booklets, scaling, ...), Easy
Color management support, Easy High color depth support (> 8bit/channel),
Easy Transparency support, Smaller files, Linux workflow gets closer to Mac OS
X, for some printers may save the CUPS-required GhostScript processing step.
(The switchover to PDF as
standard Unix print job format is work in progress.)
One of OPWG’s newest
subprojects is working on ways to quickly test whether a printer driver is
present and supports all of the printer’s features and whether the complete
print workflow chain of software is present and installed. This should ease
management and installation issues.
Support for PDA and other
small devices appears some way off at present. Although neither a spooler nor
GhostScript are needed, a small printing stack of software that has a GUI for
printer discovery, feature discovery, printer (and feature) selection, etc.
Lecture
20 — Adding and Managing Users and Groups (User/account management)
Have a policy and procedure
for creating new users and groups. Questions to ask:
·
Who gets accounts on which machines? Who decides this? Who is
actually authorized to create the accounts?
·
Are accounts local to a system/location, or global (to the
organization)?
·
Are all accounts centrally managed, or can local SAs administer
local accounts (and with what policies)?
·
Are the policies and procedures different for local vs. global
accounts?
·
What is the procedure to request a new account (or disable or
remove an account)?
·
When do accounts expire?
·
How are account names chosen (the naming policy)?
·
What is the password policy (who can change them,
when do they expire, what is the required strength)?
·
How many accounts may a single user request at one time? (Ans:
one)
·
May accounts be shared? (Ans: no)
·
How much disk space does a user get? What happens if they exceed
their quotas?
·
What email access is available (web mail, IMAP, POP, SMTP, ...)?
·
What printer access is provided (how many pages, to which
printers, and at which time of the day)?
·
From which workstation(s) may the account be used?
·
Is remote access provided for this user?
·
Is accounting to be used for this user? If so, how much capacity
can be used and for what?
·
Employers and employees should be sure to establish, in writing,
whether a social media account (Facebook, LinkedIn, Twitter, etc.) is a
personal account, or belongs to the employer. This matters if you use your
account for any business purposes, including just listing your current employer
and job title. (One PA woman had the employer take over her LinkedIn account,
replacing her information with that of her successor at the company. The courts
ruled in the company’s favor.)
·
What additional access does the user require? (To which
additional groups should the user be added?) Note additional access may
require additional configuration: database access, administration access,
physical access to machines, Kerberos (Samba) access, NFS access, email access,
protected website access, FTP access, crontab/at access, remote (dialup/VPN) access,
Internet access, other server access, etc.
Case Study: User policy at kernel.org
Kernel.org currently supports ~300 users (those with
logins), who are usually either kernel module maintainers or high-profile
developers. To qualify for a kernel.org account, people have to either be
listed in MAINTAINERS or receive a special approval from the steering committee
(Linus, Greg KH, H.P.Anvin, Ted Ts’o).
We also require that people are in the kernel.org PGP web
of trust, which means that before anyone is given access, they must have PGP
signatures from at least 3 other kernel developers who already have a
kernel.org account.
Creating
accounts
Point out that many
user/group accounts created for special purposes: ftp for anonymous ftp
user, nobody for apache user, etc. (Usually one account per service).
These are called system accounts. Never add additional users to
system groups!
Some UIDs (and GIDs) have
special meanings: 0 means root access; other special privileges may be granted
for for UIDs (and GIDs) less than 10, 100, 500, or 1,000, depending on the
system. These IDs are for the system accounts.
On most systems, especially when single sign-on is used,
you should make sure your UIDs and GIDs follow the modern *nix standard:
UID/GID 0 is reserved for root.
UIDs/GIDs ranging from 1-99 are reserved for other
predefined accounts, such as “3” from “adm” on Linux. Red Hat (including Fedora) includes a list of predefined
system UIDs and GIDs, in the file /usr/share/doc/setup/uidgid.
UIDs/GIDs ranging from 100-999 are reserved for other
system accounts, such as for a web server (RHEL <7 reserves only up to 499).
Normal users have UIDs/GIDs of 1,000 or greater (on RHEL
<7, they start at 500).
Setup these so no logins
(or FTP) is allowed for such users: discuss /etc/shells
(valid shells), /bin/false,
and no shell at all. Also disable account in shadow
(no valid password, something like “!!no
login” in the password field). (Solaris: *LK*.) Locked or invalid shell prevents ftp, possibly
other services.
The systemd-sysusers command uses the
files from the /etc/sysusers.d/ directory to create system users and groups and to add
users to groups, at package installation or boot time.
Networks of computers (and
even single hosts) can use a shared user account database: NIS, NIS+, Kerberos
(Win2k and newer users this), LDAP, or others. Each user gets a single record
in the database and can be authenticated on any machine in the network.
(Example: YborStudent, DMSun, Windows network, all use a single DB so you have
a single password for any computer at HCC.) These are known as global
accounts. Each host may also have local accounts.
(Where to find accounts is determined by PAM or nsswitch.conf
or both.)
Accounts should always
be created disabled initially. You should have and follow a password
policy (strength, expires, ...), have a default shell, set a default
web page to the company policies and procedures webpage (new user page which
you create & maintain), decide which services to allow (telnet, website,
printing, Internet access, NNTP (netnews) access, remote access, administration
access, FTP, SSH, DB, chfn, crontab/at,
Samba, ...), and configure such services as needed. /etc/default/* contains defaults for several programs
including useradd. Don’t forget
to set a default printer, any needed quotas (see below), NFS, and an initial
password (use a password generation program such as pwgen or apg).
Use a custom script to add,
disable, and remove accounts: samba.conf, htaccess, ... Your script can invoke
useradd. Then it can add the
user to DB access files and various groups, to setup accounting, quotas,
website, email aliases, etc. Can also email user a “welcome” message, set
first time home page for web browsers to new user info, etc. This way you don’t
have to remember all the services and how to configure each. Just maintain the
scripts.
Have policy for
usernames. Don’t have long names. Don’t use periods (or other special
symbols) in usernames (periods will mess up LDAP, NIS directories). While
usernames are case-sensitive, email addresses are not. So it would be a
mistake to have two user accounts “hymie”
and “Hymie”. Use only 8
lowercase letters, digits, and underscores, and your names will work on all
systems; a good idea if single-signon is used (or a possibility). For example,
flast (‘f’=first name initial, ‘last’=up to seven letters of last name.
Consider non-English names too; in some cultures, one name is the norm.)
A good policy is dept###,
as in “it012” for the IT dept, using all lowercase letters and digits only.
However, this makes it hard for SAs to match real names with account names. A
common policy is to form usernames from the users’ names. This can cause
problems when you hire the second “J. Smith” and you wind up with accounts such
as jsmith2. There is also a
security implication: if a cracker knows an employee’s name, they can easily
guess the login account name. For greatest security, each account should have
an email alias as well (again, to hide the real account names). In most
environments, such security measures are not needed.
Usernames > 8 characters or that contain weird
characters can crash some programs on Solaris, and cause security problems on
any *nix system. In particular, the common practice of using periods in names
is bad (can confuse chown and other commands).
Password policy:
The file /etc/login.defs
(Solaris equivalent: /etc/default/login)
is the configuration file for the Shadow password Suite. /etc/login.defs contains settings from
what the prompts will look like to what the default expiration will be when a
user changes his password. The /etc/login.defs
file is quite well documented just by the comments that are contained within
it.
The login.defs file has a setting for
minimum password length, but this setting is only used if the shadow suite
is used, not for NIS or LDAP. Also passwd
uses PAM to reject passwords, so configure that to set policy (discussed
in CTS-2322). Both login.defs
and PAM are checked when changing passwords.
Warning! Some (but
not all) Linux security utilities use a common library for updating passwords,
groups, etc., called libuser. The /etc/libuser.conf
imports values from login.defs
and /etc/default/useradd, and
can over-ride those settings. Note useradd
doesn’t use libuser.so while passwd does. When changing
password policies, be sure to update all the policy files! Otherwise some
commands will use different policies. (Yes there should be one password policy
file, but nobody asked me.)
Password aging
policies need to be defined as well. Besides the account expiration date, you
can set a max password age (in days) after which the user will be forced to change
it (at next login). You can also set a warning period. The poorly named inactive
days is the number of days after which an expired password is no longer
accepted (so the user is locked out).
Groups
A group is
a collection of users who can share files and other system resources (i.e., a
group of users with identical access needs). For example, the set of users
working on the same project could be formed into a group. Each group must have
a name, a group identification (GID) number, and a list of user names that
belong to the group. A GID identifies the group internally to the system.
Some GIDs have special meanings to the system (e.g., GID of zero.) The
standard DB for group information is /etc/group.
(See web resources for group
strategies).
The two types of groups
that a user can belong to are the primary group, which specifies
a group that the operating system assigns to files created by the user, and secondary
(or supplemental) groups, which specify one
or more groups to which a user also belongs.
Each user must belong to
one primary group. Users can belong to up to 16 secondary groups (legacy
limitation from RPC/NFS). If not using RPC/NFS a user can belong to up to 32
secondary groups (no limit on Linux kernel, on other systems max value NGROUPS can be configured).
Ownership of newly created
files reflects the primary group, not any secondary groups. (A user can change
the group of a file to any secondary group using chgrp.) A user can also temporarily change the
primary group with newgrp
(which starts a new shell), or permanently by updated the user database e.g., /etc/passwd.
To add a group without logging out and then logging back in
(the normal way to have the changes picked up), you can try this hack:
exec su -l $USER
But this only works for the current shell (not all sessions
at once), and will log you off if you mess up your password. Still, that’s not
a big deal. The exec works with newgrp as well.
Some groups have special
uses. On Solaris a user has to be a member of the sysadmin group (group 14) to use the Admintool
software, but it doesn’t matter if group 14 is their current primary group.
(Linux, BSD: wheel group
may be used similarly.) With systemd, the log data for any user can be view if
you are a member of the adm
group. Many other groups are used as the group ID for particular daemons, or
have other purposes.
Two other groups worth knowing about: members of group vboxsf (and root) are the only ones with access to VirtualBox
shared folders; members of group wireshark (and root) can
capture packets.
groups lists groups that a user belongs to, as will
the id command. (To find
out all groups for some user, grep
for that user in /etc/group and
in /etc/passwd (for primary
group number; grep for that in /etc/group to get name).
When adding a user
account, you must assign a primary group for a user or accept the default: staff (group 10) on Solaris. The RH
default is to create a new group for each user. (This default can be
changed.) The primary group should already exist (if it doesn’t exist, specify
the group by a GID number). User names are not added to primary groups. (If
they were, the list might become too long.) Before you can assign users to a
new secondary group, you must create the group and assign it a GID number.
Add/remove users to/from groups with gpasswd
(Linux) or smgroup modify -m
grp user (Solaris).
Account and Group Management Commands
GUI
tools: redhat-*, system-*, admintool (and SMC) for Solaris, webmin (all systems).
Cmd-line: user{add,mod,del} (Linux note:
using -p 'foo' sets the password field in
shadow literally to foo, not to
an encrypted version of it!) Discuss the -G
option to set supplemental groups for users; use -Ga
to append.
If using some single sign-on centeral user account
database, these commands may not work correctly, as they generally only add
users to system-local files (such as /etc/passwd). Other commands
add/modify/delete users from LDAP or Active Directory (Kerberos) user
databases.
group{add,mod,del}, gpasswd
(Solaris: smgroup) (discussed
below), passwd (Solaris
version does more than the Linux version),
vipw, vigr,
pwck, grpck, chage. (Also chfn,
chsh; on Solaris use passwd.) Another (sometimes useful)
command: last shows the last
time a user has logged in.
Manually: edit the
files /etc/{passwd,shadow,group,gshadow,skel,login.defs,libuser.conf}.
Also configure PAM for login and password configuration.
Some systems may include commands for adding users in
batches, or changing passwords in batches. For example, see the Linux commands
newusers and chpasswd.
Set up quotas
(discussed later) with setquota,
edquota.
Warning! The standard
commands to lock accounts (“lock-out users”) are passwd -l and usermod -L. However, these commands don’t lock the account!
What these commands do, is prepend “!”
or “!!” to the password in /etc/shadow. (Solaris replaces
the password with “*LK*” instead.) The idea is that any attempt to log in can’t
succeed since nothing you enter can match such a password. However, this won’t
prevent users from loggin in using SSH keys, or (on most systems), from running
crontab or at jobs, or receiving email (which can cause programs to run via ~/.forward or ~/.procmail).
It works better to use some PAM modules to lock accounts, say
pam_listfile.so to check a list of locked usernames, or pam_shells.so to check for a valid shell in /etc/passwd. Then you can lock accounts by adding the username to the
list checked, or by changing their shell field to something such as /bin/false.
The standard way to lock out users is to expire their user
account. If using the shadow suite, you
can use “usermod -e 1” for that.
Systemd attempts to manage
user processes and sessions. The systemd command to manage user sessions is loginctl.
Since version 230, systemd
by default will kill all a user’s processes still running once the user logs
out, including those started by nohup!
It is possible to disable this “feature”. To do this, a system administrator
can set the “KillUserProcesses=no”
option in systemd’s configuration file /etc/systemd/logind.conf.
If just a few users needs
to run processes that should be left alone by systemd, they must enable “lingering” for their account with “loginctl enable-linger username”,
and remember to run commands with the systemd-run
command preceding the nohup
command (also the tmux and screen commands).
Setting up
disk quotas on Linux — the short version
quotaon
-pa # shows no quotas on
vi
/etc/fstab # add usrquota and/or grpquota to options
mount
-o remount /home # picks up new options
quotacheck
-cMuv /home # create, initialize the quota DB
chmod
a+r /home/aquota.user #permit users to check quotas
restorecon /home/aquota* #Update SELinux labels if needed
quotaon
-a # start enforcing quotas
setquota
auser soft-bk hard-bk soft-files hard-files
/home
setquota
-ta 604800 604800 # 7*24*60*60= 1 week grace
repquota
-a
Disk Quotas
A disk quota is a limit on the
amount of disk blocks and/or inodes a given user (or group) is allowed to use,
per filesystem. Not all filesystem types support quotas; for those that do
special mount options must be used to have the kernel enforce the limits. A
special command toggles quote enforcement (quotaon).
When quotas are enforced (“turned on”)
the kernel will track how many disk blocks and inodes a user is using, and
update the quota database file(s). When quotas are not enforced, or the
filesystem is mounted without the proper mount options, the databases do not
get updated. Even when enforced, if a filesystem remains mounted long enough
it is possible for the database to become corrupted. Periodically (and also typically
at each boot) the quota database file(s) for each filesystem with quotas gets
rebuilt using the command quotacheck.
This command is also used to create the DB the first time you set up quotas.
If a user exceeds the quota limit
for the number of blocks and/or inodes, the user won’t be able to allocate any
more blocks/inodes but can still unallocate them (i.e. remove files). The
system uses both a hard quota limit that can never be exceeded
(while quota enforcement is on), and a lower soft limit that can
be temporarily exceeded.
Once a user goes over the soft limit a
configurable (per filesystem, not per user) grace period timer
starts a countdown. As long as there is still some grace time left the user
can still allocate more blocks/inodes. But once the grace period has expired
(it will report “none” left) no
further allocations are allowed. In addition the SA can configure the quotawarn system (run either by cron, manually, or by a login
script). This will generate email and/or console warnings to the user if they
are exceeding their soft quota.
Once the user has reduced their disk
use to be under the soft quota limit, the grace period gets reset.
Some weird things can happen when you exceed your quota and
your grace period has expired. If you have exceeded your block quota but not
your inode quota on /home, you can still create files but they will all be zero
length. This can prevent GUI logins, since X attempts to create ~/.Xauthority. (If the file can’t be created X will try to create it in
/tmp instead). The file gets created but of zero length, and
when X tries to use it the session fails. Depending on your login scripts even
console logins may fail.
Commands: quota [-sugvq]
to report on quotas. This is the one command regular users can use to see
their own quotas.
quotaon [-a], quotaoff
is used to turn enforcement on/off, per filesystem. (“-a” means turns on/off quotas for any filesystems listed
in fstab with the mount options quota or usrquota or grpquota, or some such option;
this depends on the options supported by that type of filesystem. See the mount command man page.) Running quotastats shows the kernel’s quota
activity.
repquota
will produce aquota report on Linux; the Unix command is quot. Running (as root) quotasync first makes the report
accurate.
Use quotacheck
[-anMguvR] to create or recreate
the quota database file(s) on each filesystem (aquota.{user,group} in the
fileystem’s root directory). The common (Linux) options include: -a = all FSs listed in fstab, -n=ignore duplicate entries (i.e., fix
DB corruption), -M=don’t quit if
can’t remount partition as ro
(useful for root partition), -g=do
group quotas, -u=do user quotas,
-v=show even if =zero, -R=don’t do quotacheck for root. Typical
use:
quotacheck
-aRnguv; quotacheck -Mnguv /
Since the root filesystem cannot be mounted read-only while
the system is running, we need to do a force quota check on the system which
might result in inaccurate figures and can cause corruption to the quota files.
For this reason, only check the root filesystem while the system is quiescent
(e.g., in single-user mode, with no daemons running). It is advisable to have
a partition plan where quotas on the root filesystem aren’t needed.
Easier is to pass the systemd option “quotacheck.mode=force” to the kernel from your boot loader. While not
documented in systemd, creating a file named “/forcequotacheck”
also works (thru F27 at least) to make the next boot check quotas.
Note that most filesystems treat the
quota databases specially, and do not journal updates. As a result, it is
usually required to rerun quotacheck after a crash. For Linux ext3 and ext4,
there are special mount options to force quota updates to be journaled as
well. (See mount(8) for the ext4
options of usrjquota and grpjquota.) A typical use would be:
usrjquota=aquota.user,jqfmt=vfsv0
Note two (rather
lengthy) options are required to enable journaled quotas.
edquota
: puts SA into vi to edit quotas:
-g=edit group quotas, -t=edit soft limits instead of hard
limits. I prefer to use the setquota
commad line tool which can be scripted, or any GUI tool such as webmin.
warnquota
can be used from /etc/profile
login script or cron.daily. It
needs to be configured with the fileystems to watch and the messages to show.
To turn on quotas
use some simple GUI tool, or do these steps:
(1) Edit fstab and add usrquota,grpquota to options. (If not using group quotas,
there is no need to enable and enforce them. Note some system use (or allow) quota in place of usrquota.)
(2) Create empty
quota files in the root directory of each filesystem, e.g.
touch /home/aquota.{user,group}
(This is because the quotacheck
command can edit these files but not create them, on some systems.) Verify the
quota database files have been created with the correct permissions: chmod 644 aquota.{user,group}
(If not readable, users can’t check their quotas, only root can!)
(3) Remount disk
partitions to enable the new options:
mount -o remount,usrquota /dev/sda? or /dev/mapper/*
(If this fails, it maybe due to GVFS mounted in $HOME/.gvfs. If so, you will need to umount that first.)
(4) If on, turn off
quotas before running quotacheck:
quotaoff -a
Running quotacheck while the kernel is
enforcing quotas will corrupt the files! To help guard against this, for ext4,
quotaon also makes the aquota.* files immutable
(and no atime). If the system crashes, you may have to manually
clear those attributes with chattr, before you can
sucessfully run quotacheck.
(5) Initialize the
DB files with quotacheck -anvugR;
quotacheck -nvugM /
(6) Setup limits for
groups and users: edquota -u joe;
edquota -t (to edit the grace period) or use setquota (a cmd line tool)
(7) Run quotacheck again
(8) Turn on quotas
and check log files: quotaon -a
(9) Setup startup
scripts to turn on quota at boot (steps 3 and 7). Can also enable warnquota from /etc/cron.daily (see /etc/{quotatab,warnquota.conf})
desktop-file-utils
Running quotacheck from cron sounds like a good idea, but
it is dangerous. Your periodic job must only run when the filesystems to be
checked are not actively used (quiesed). The quota enforcement must be disabled
before running the check, then re-enabled afterward even if quotacheck failed.
During the check, filesystems will be remounted as read-only or the check will
fail. (You can force it to check anyway, but that’s not a good idea.)
Running warnquota without any options will
email users that go over the limit. This can also be run via cron every day. The message sent
depends on the contents of /etc/warnquota.conf.
You should edit this so if a user is over quota for the filesystem holding
mailboxes, warnquota won’t send
email warnings. Other settings can be changed too. The filesystems checked
are listed in /etc/quotatab;
you should edit that as well. Finally, if you have enabled group quotas you
need to edit /etc/quotagrpadmins
to state who gets the warning when a group quota is exceeded.
As of Solaris 10 ZFS also supports user and group disk
quotas. The ZFS commands are different though (UFS uses the commands discussed
above):
# zfs set userquota@auser=5G somefs
# zfs set groupquota@staff=10G somefs
# zfs get userquota@auser somefs
# and groupquota
# zfs userspace somefs # and groupspace
Delete
accounts:
Removing user accounts
can be much harder than adding them! While not always true, often you can
distinguish two cases, each with a slightly different timetable for performing
various steps. However, there may be legal and policy reasons to treat all
terminated employees the same.
One good idea is to create
a “remove-user” script that
undoes all the updates done by your “add-user”
script. The scripts remember what must be done for you. (You only need to
keep the scripts up to date.)
The complete account
removal process may take one to seven years, depending on applicable laws,
regulations, insurance policies, etc. (The statute of limitations applies
here.)
While here we are just
considering removing access on a single host, keep in mind the big picture.
When an employee is terminated, and especially when an SA (or anyone with extra
access) is terminated, you should:
·
Follow your organization’s HR policy. This is the most important
rule.
·
Create a checklist, so the steps to follow can be reviewed. Use
the checklist so no steps are forgotten.
·
Remove physical access: disable keycards, change combination door
locks, have security personnel informed so the employee can’t get into secure
areas.
·
Remove any remote access: VPN, web, etc.
·
Remove server access.
·
Notify those who need to know. That includes co-workers and the
employee’s clients (or patients or whoever), but that is not the responsibility
of the SA. You only need to worry about the terminated employee with IT
responsibilities (if any). You may need to contact other SAs at other
locations. More importantly, you need to notify ISPs and others that the
terminated employee is no longer empowered to act for your organization.
One famous failure of this was when a Microsoft fired
employee ordered a new microsoft.com SSL certificate
after termination. Since the CA didn’t know
the employee was no longer with Microsoft, they issued the certificate.
The former employee then could put up a fake Microsoft web site, one that had a
valid certificate for HTTPS!
Unfriendly
(fired for cause) Termination:
This is the situation where
the person whose account you are removing is not trustworthy and may either
cause damage if permitted access, or may have already caused damage. This can
be very serious if the account was for an administrator (who had root
access). Your goal here is to stop all access immediately, preserving as much
data (which may be evidence) as possible, and to determine what damage may have
already occurred.
Remember that by the time
an evil/bad employee is fired he/she may have been corrupting your system for
quite some time. CVS/RCS and other log files can be very useful here, as can process
accounting records (if you installed that).
Tasks
to do immediately:
·
Disable login (including all FTP, HTTP, database, Samba, and
Wi-Fi access).
·
Preserve and disable all at
jobs, cron jobs, and other
spooled work (e.g., printer jobs, UUCP, NNTP, ...). Also examine running
processes.
·
Examine and (probably) disable the .forward
file and any email aliases resolving to this account (MTA), and the .procmailrc file (MDA). (An easy way
to do this is simply to add an alias in /etc/aliases,
so the user’s mail is sent to someone else.)
·
Examine any mailing lists the user managed, and transfer them to
someone else. Also, remove the user from any email lists that are for employees
only.
·
Examine shared calendars, external surveys, room reservation
systems, etc., and delete, notify, or replace the former employee, as
appropriate.
·
Preserve FTP and other data (not forgetting any guest or anonymous access) to which the user may have had write
access.
·
Disable any trust relationships that would allow remote
login (rlogin, ssh, etc.). Note that on Solaris (version
9 at least, maybe others) you can lock the account by having “*LK*” in the password field (of /etc/shadow or where ever these are
stored). This will prevent cron and at jobs from starting.
·
Remove user from application and server configuration files: databases,
htpasswd (web authentication) files,
Samba, etc.
·
Delete proprietary data/emails from cell phones, PDAs, etc.
Tasks
to do (hours to days) later:
·
Reassign files to other users.
·
Remove user from remaining configuration files: database records,
files accessed by PHP or CGI /etc/sudoers,
/etc/hosts.*, etc. (grep is your friend here!)
·
You and the other employees must check all files the user had
write access to, for Trojan horses, defaced web pages, or any other
damage. This includes any scripts, web pages/Java applets, database
stored commands, office documents with macros, etc.
·
Check web pages (and CGI scripts) for email addresses and URLs
that need to be changed or removed.
·
Check and take control of (e.g., change password) of any social
media accounts used for your organization, even if in the employee’s name.
These include Facebook, Twitter, etc.
·
Have the remaining developers look through any source code the
user was working on so you don’t later compile in bad or evil code.
Examine the makefiles, RCS/CVS repositories, etc. These are not
executable but do contain commands. With Java development, check ant and Maven files too.)
·
Update all procedures that assigned roles to the fired person
(for example the disaster recovery plan).
·
Notify internal and external people and organizations of the
change in personnel. You must notify all those to whom the fired employee
was the contact for your organization, e.g., customers if a sales person; media
if a marketer (so they don’t cancel or place or change orders, ads, etc.);
business partners, ISPs (so the employee doesn’t change service or change DNS
or WHOIS records), CAs, etc.
Tasks to do even later
(weeks/months/years):
·
(weeks/months) Delete home directory and email (archive first).
·
Recover loaned (at home) software and hardware.
·
Re-negotiate software licenses (and other agreements) that
included this employee.
·
Lastly (months/years later), delete the user account.
You may never want
to delete the UID! User IDs are still used in archives and backups, and
possibly in files on other systems. If the UID is ever reassigned and a file
is restored, you may have created a security problem. If a UID is reused, then
years later (in court for instance) it will not be easy to determine who
actually owned some file with that UID.
Note you may have to speak
with a fired employee before they know they’ve been fired. Say something like
“Before your account can be re-activated you must speak with X (the
fired person’s supervisor/boss)”. Be aware that the supervisor may have had a
miscommunication and may order the account re-activated, so don’t do anything
irreversible too soon.
Friendly
Termination:
This is the situation when
an employee left their job (or was promoted to a different position), with no
hard feelings. In this case, you may wish to allow some access for an extended
period. For example, if a salesperson is promoted to manager, former clients
should still be able to contact this person using the same email address.
Developers may need to submit patches and communicate with former colleagues.
Universities often allow former students access for years after graduation to
computer resources. (A recent HCC retiree of 35 years of service, had their
email access turned off within 24 hours of her last day. This caused considerable
disruption.)
Policy may dictate that
account removal follow the same procedure for friendly or unfriendly
termination, to comply with regulations, to limit liability, or just for PR
purposes (so customers or stockholders have high confidence in your
procedures).
If allowed by your
organization’s policies, some differences between friendly and unfriendly
termination may include:
·
Disable login and remote access after user has chance to copy
files (i.e., address book, bookmark files, etc.) Note policy may dictate that
the user requests these files, and that you send the files to the user after
verification (and approval) that the files are not proprietary and can be given
away.
·
Setup email forwarding or redirects.
·
Check at and cron jobs. These may be OK to keep
running, but eventually will need to be reassigned to another employee, or deleted.
·
Check web site for email addresses/URLs that may need to be
changed; examine email aliases too.
·
Later remove all access just as for unfriendly termination.
·
Eventually (months/years) turn off email forwarding.
·
Finally delete user account (or not; see above).
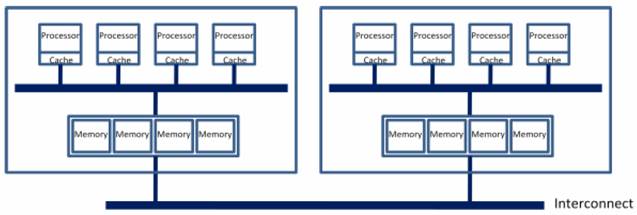
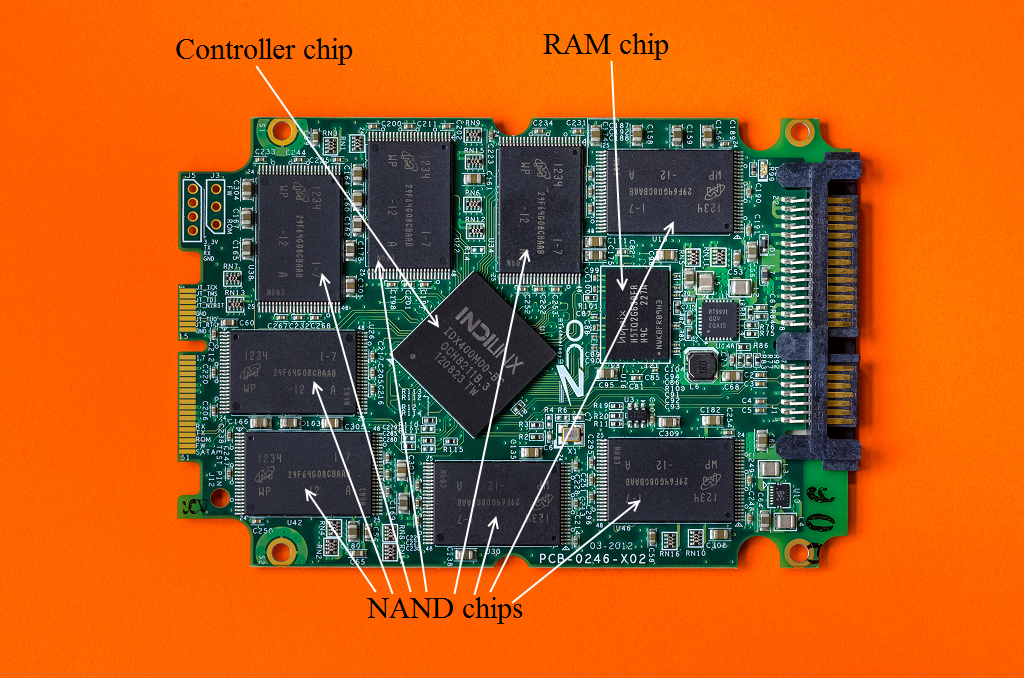{kind=link}
{kind=link}